帶有期望補(bǔ)償?shù)淖赃m應(yīng)魯棒控制律設(shè)計(jì)及比較分析?
2012-06-02 08:18:56陶瑞超楊亞非
測試技術(shù)學(xué)報(bào) 2012年1期
陶瑞超,楊亞非
(哈爾濱工業(yè)大學(xué)控制與仿真中心,黑龍江哈爾濱 150080)
隨著計(jì)算機(jī)技術(shù)的不斷發(fā)展,國內(nèi)外學(xué)者對伺服系統(tǒng)控制算法進(jìn)行了大量的研究,使得伺服系統(tǒng)的控制性能得到了很大的提高.傳統(tǒng)的控制算法PID控制適用于可建立精確數(shù)學(xué)模型的確定性系統(tǒng),通過對誤差輸入信號(hào)進(jìn)行比例、積分、微分運(yùn)算合成控制輸出[1],由于其結(jié)構(gòu)簡單易于實(shí)現(xiàn),成為應(yīng)用范圍最為廣泛、應(yīng)用時(shí)間最長的控制算法,但是對含有不確定性的非線性系統(tǒng)難以進(jìn)行有效控制.自適應(yīng)魯棒控制[2-4]既具有自適應(yīng)控制的學(xué)習(xí)能力和高精度的穩(wěn)態(tài)輸出,又具有魯棒控制對于未建模動(dòng)態(tài)和擾動(dòng)的魯棒性以及優(yōu)越的暫態(tài)性能,能夠滿足伺服系統(tǒng)高精度的跟蹤要求.傳統(tǒng)的自適應(yīng)魯棒控制回歸量在模型補(bǔ)償中和參數(shù)自適應(yīng)律中都是直接根據(jù)狀態(tài)變量計(jì)算的,其自適應(yīng)環(huán)節(jié)的性能在實(shí)際應(yīng)用中可能會(huì)受到測量噪聲的影響.本文以傳統(tǒng)自適應(yīng)魯棒控制為基礎(chǔ),給出了帶有期望補(bǔ)償?shù)淖赃m應(yīng)魯棒控制方法,并對控制性能進(jìn)行比較分析.
1 建立被控對象模型
伺服系統(tǒng)的執(zhí)行機(jī)構(gòu)為電機(jī),在電機(jī)模型的推導(dǎo)過程中,由于電氣響應(yīng)很快,電流的動(dòng)態(tài)特性與機(jī)械的動(dòng)態(tài)特性相比是可以忽略的.電機(jī)的數(shù)學(xué)模型表達(dá)為[5]

式中:Y代表慣性負(fù)載的位置;M為慣性負(fù)載的轉(zhuǎn)動(dòng)慣量;u為電機(jī)的輸入電壓;F為所有不確定非線性如摩擦力矩Ff,波動(dòng)力矩Fr和外部擾動(dòng)Fd的總和.根據(jù)對多種經(jīng)典摩擦模型的分析,簡便并且恰當(dāng)?shù)姆椒ㄊ钦J(rèn)為摩擦力矩是速度的靜態(tài)非線性函數(shù),設(shè)為Ff(﹒y),其形式為

式中:B是系統(tǒng)的等價(jià)粘滯摩擦系數(shù);Ffn是非線性摩擦項(xiàng),其模型為[6]

式中:fs是最大靜摩擦值;fc是最小庫倫摩擦值;﹒ys和ξ是用來描述 Stribeck效應(yīng)的經(jīng)驗(yàn)參數(shù).由于系統(tǒng)中其他組成部分造成的誤差,摩擦力矩還與角位置y有關(guān),將這部分摩擦力矩歸于外部擾動(dòng)Fd.
由摩擦模型的函數(shù)式(3)可知,該模型在速度為零時(shí)是不連續(xù)的,因此不能采用該模型作為摩擦補(bǔ)償?shù)哪P?因?yàn)殡姍C(jī)無法輸出不連續(xù)的力矩.為避免上述問題,利用一個(gè)簡單連續(xù)的摩擦模型來近似實(shí)際的不連續(xù)摩擦模型,選取摩擦模型的近似模型為

式中:Af未知;Sf(x2)為連續(xù)函數(shù),將近似摩擦模型的誤差歸為系統(tǒng)的總擾動(dòng)d,d=ˉFfn-Ffn+Fd.
將摩擦模型的近似模型式(4)代入電機(jī)模型式(1),得到被控對象模型為

式中:x=[x1,x2]T代表被控對象的位置和速度的狀態(tài)向量;y是位置輸出,=d-dn,dn代表系統(tǒng)總擾動(dòng)力矩d的標(biāo)稱值.
取xd(t)為期望輸出軌跡,跟蹤誤差表示為z=x-xd(t),控制的目的是設(shè)計(jì)有界的控制律u使跟蹤誤差z(t)盡可能小.
2 帶有期望補(bǔ)償?shù)淖赃m應(yīng)魯棒控制


定義期望回歸量 φd(t)=φ(xd(t)),回歸量誤差 ~φ=φ(x)-φd,用期望回歸量 φd(t)替代被控對象模型式(6)中的 φ(t).選取自適應(yīng)律形式為[7]


性質(zhì)1:該映射具有如下性質(zhì)


因此,帶有期望補(bǔ)償?shù)淖赃m應(yīng)魯棒控制控制律表示為


綜上,將期望補(bǔ)償自適應(yīng)魯棒控制律式(11)代入系統(tǒng)模型式(6)中可得

由中值定理可得

式中:gf(x2,t)是確定的_非線性函數(shù).設(shè)計(jì)ks1為足夠大的正數(shù),使得矩陣

是正定的.由式(13)可以得出,如果要使矩陣A≥0,則當(dāng)且僅當(dāng)ks1滿足

結(jié)論:若采用帶有期望補(bǔ)償?shù)淖赃m應(yīng)魯棒控制律式(12)和基于非光滑投影的參數(shù)自適應(yīng)律式(8),則:①當(dāng)系統(tǒng)存在非線性不確定性時(shí),系統(tǒng)輸出漸進(jìn)趨近于常數(shù);②若系統(tǒng)只存在參數(shù)不確定性,穩(wěn)態(tài)跟蹤誤差為零,并且當(dāng)滿足持續(xù)激勵(lì)條件時(shí),參數(shù)估計(jì)值趨近于它們的真值,并且由于期望補(bǔ)償自適應(yīng)魯棒控制的自適應(yīng)函數(shù)關(guān)于反饋信號(hào)是線性的(與z有關(guān)),該積分型自適應(yīng)律可以使參數(shù)估計(jì)^θ和模型補(bǔ)償ua都對于測量噪音不敏感.
選取期望軌跡為正弦曲線xd=sint,采用期望自適應(yīng)魯棒控制律進(jìn)行補(bǔ)償,得到仿真結(jié)果如圖1.
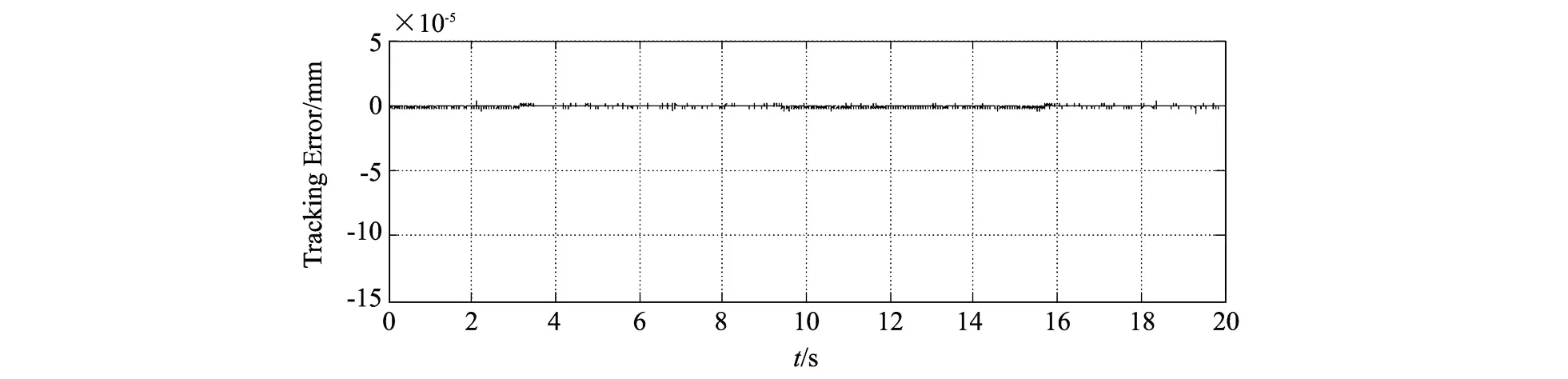
圖1 帶有期望補(bǔ)償?shù)淖赃m應(yīng)魯棒控制跟蹤誤差曲線Fig.1 Tracking error of DCARC control law
由仿真曲線可以看到:帶有期望補(bǔ)償?shù)淖赃m應(yīng)魯棒控制的跟蹤誤差趨近于一個(gè)非常小的常數(shù),并且跟蹤性能的動(dòng)態(tài)響應(yīng)快速.
3 控制性能對比
采用PID控制反饋補(bǔ)償時(shí),被控對象模型式(1)改寫成

在對象模型中,利用已知的變量y(t),﹒y(t),yd(t),﹒yd(t),¨yd(t)設(shè)計(jì)系統(tǒng)控制輸入為

將式(16)代入式(1)中可以得到系統(tǒng)閉環(huán)特征方程為

通過閉環(huán)函數(shù)極點(diǎn)配置可以計(jì)算出Kp,Ki,Kd的值.在仿真驗(yàn)證時(shí),由于參數(shù) θ1,θ2,θ3是未知的,所以初始估計(jì)值(0),(0),(0)代替為

同樣選取期望軌跡為正弦曲線xd=sint,采用期望自適應(yīng)魯棒控制律進(jìn)行補(bǔ)償,得到的仿真結(jié)果如圖2所示.
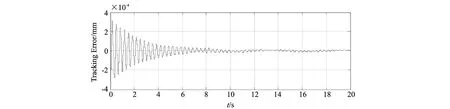
圖2 PID控制跟蹤誤差曲線Fig.2 Tracking error of PID control law
由圖2可以看到:系統(tǒng)誤差存在衰減振蕩過程,并且最終的輸出誤差存在一定穩(wěn)態(tài)誤差.帶有期望補(bǔ)償?shù)淖赃m應(yīng)魯棒控制性能與PID控制相比,跟蹤誤差更小,并且具有良好的參數(shù)估計(jì)效果.
4 結(jié) 論
本文采用帶有期望補(bǔ)償自適應(yīng)魯棒控制方法實(shí)現(xiàn)對伺服系統(tǒng)的控制,通過采用Matlab/Simulink進(jìn)行仿真驗(yàn)證.由仿真得到的跟蹤誤差曲線可見,帶有期望補(bǔ)償?shù)淖赃m應(yīng)魯棒控制方法能夠滿足高精度跟蹤的性能要求.與傳統(tǒng)PID控制進(jìn)行對比,通過仿真結(jié)果可以看到:帶有期望補(bǔ)償?shù)淖赃m應(yīng)魯棒控制性能可以得到更高精度的伺服跟蹤效果.
[1]Hua Sun,Dai Yuehong.Fuzzy PID control and simulation experiment on Permanent Magnet Linear Synchronous Motors[C].Proceedings of International Conference on Electrical and Control Engineering,2010:1047-1049.
[2]Krstic M,Kokotovic P.Adaptive nonlinear design with controller-identifier separation and swapping[J].IEEE Trans Automatic control,1995,40(3):426-440.
[3]Li Xu,Bin Yao.Adaptive robust precision motion control of linear motors with negligible electrical dynamics:theory and experiments[J].IEEE/ASME Transactions on Mechatronics,2001,6(4):444-452.
[4]Bin Yao,M Tomizuka.Adaptive robust control of M IMO nonlinear systemsin semi-strict feedback forms[J].Automatica,2001,37(9):1305-1321.
[5]杜坤梅,李鐵才.電機(jī)控制技術(shù)[M].第2版.哈爾濱:哈爾濱工業(yè)大學(xué)出版社,2002:1-6.
[6]王英,熊振華,丁漢.基于狀態(tài)觀測的自適應(yīng)摩擦力補(bǔ)償?shù)母呔瓤刂芠J].自然科學(xué)進(jìn)展,2005,15(9):1100-1105.
Wang Ying,Xiong Zhenhua,Ding Han.High-precision control of adaptive friction compensation based on state observer[J].Progress in Natural Science,2005,15(9):1100-1105.
[7]Yao Bin,Tomizuka M.Smooth robust adaptive sliding mode control of robot of Dynamic Systems[J].Measurement and Control,1996,118(4):765-770.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
