基于FLUENT的多體船阻力研究
2012-06-07 01:30:32楊陳林張忠宇楊帆鄭
船舶 2012年5期
關鍵詞:船舶
張 楊陳 林張忠宇楊 帆鄭 律
(1.哈爾濱工程大學 船舶工程學院 哈爾濱150001;
2.上海船舶運輸科學研究所 上海 200135)
0 引 言
近幾十年來,高性能船舶由于在耐波性、快速性、經濟性等方面的優越性,獲得了巨大的發展[1]。多體船作為高性能船的一個重要方向,進展也較快。船舶阻力可以分為摩擦阻力、興波阻力和粘壓阻力,其中又以摩擦阻力和興波阻力為主。一般采用相當
1 雙體船的阻力性能研究
雙體船的船型及水動力研究相對成熟,本文針對小水線面雙體船(SWATCH)進行阻力計算,并與相關經驗公式進行對比,以驗證計算模型的合理性[2]。
1.1 計算模型的建立
本文的計算模型為SWATH數學船型。其水下片體由圓柱體平行中體、首尾兩端各為半個橢圓球體的主體,以及垂直水面方向的等截面柱體支柱組成,如圖1所示。
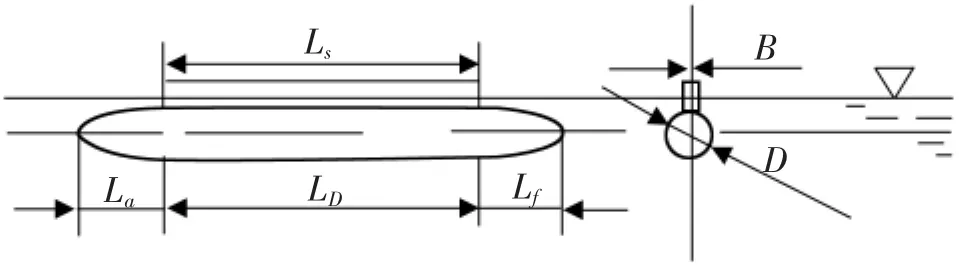
圖1 船型水下片體結構
圖1中各特征尺度見表1。

表1SWATH數學船模特征尺度單位:m

速度入口位于SWATH首部上游1倍船長處,壓力出口位于SWATH船尾下游3倍船長處,周向無剪力固壁邊界位于自SWATH中心線向外延伸1倍船長處。由于SWATH片體之間的距離通常很大,為了減少網格數量以便于簡便計算,在計算其粘性繞流時忽略片體之間的相互影響,在SWATH中心對稱面采用對稱邊界條件Symmetry。采用RNG k-ε模型的湍流模式,對流項使用QUICK格式離散,擴
支柱的半寬水線為拋物線,由式1表達:散項為中心差分格式,采用SIMPLE法進行壓力場和速度場的耦合求解,自由液面捕捉用VOF法,計算過程使用多重網格法加快收斂速度。計算域頂部及遠方邊界為滑移壁面,船體表面為不可滑移壁面。計算時為獲得穩態流動計算結果,采用時間步進法。從研究結果來看,時間步長對計算結果及收斂性有一定的影響。本文所采取的時間步長為無因次的,其值為0.001。初始時刻水面為靜水面,并使用入口處流動參數來初始化流場[3]。
1.2 經驗公式推導
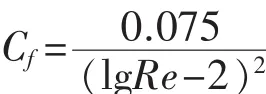
為了驗證FLUENT軟件計算得到的結果,本文將計算得到的粘性阻力系數和半理論、半經驗方法估算的粘性阻力系數進行比較。在計算中,粘性阻力系數Cv和雷諾數Re的計算如下[4]:

式中:Rv為粘性阻力;
ρ為流體密度;
U為航速;
S為濕表面積;
υ為流體運動粘性系數。
將SWATH的粘性阻力分為支柱粘性阻力和主體粘性阻力兩部分:

式中:下標s為支柱; h為主體。式中Rvs、Rvh分別滿足式(5)、式(6):
形狀因子表示水中結構的粘性阻力與相當平板摩擦阻力之比,主要取決于物體的幾何外形和雷諾數。因為SWATH的支柱與主體的形狀比較規則,所以采用經驗公式來計算形狀因子能夠保證計算的精度。可將雙體船的支柱看成一個狹長的機翼來處理,由于機翼尾端與水下部分主體相連接,使支柱周圍垂向水流流動受到約束,可將支柱等效為二維機翼,其周圍流動近似用二維流動等效,這樣用機翼理論可得到支柱的形狀因子公式:

式中:t為支柱的最大厚度(此處支柱寬度為B)。
SWATH的主體為一規則回轉體,因此用霍納(Hoener)建議的回轉體形狀因子公式來計算其形狀因子:

1.3 計算結果分析
選取1 m/s和5 m/s兩個速度進行計算,計算結果如圖2所示。
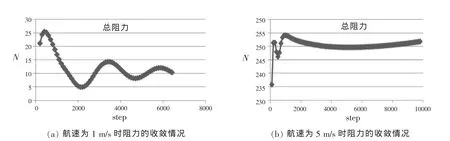
圖2 FLUNET計算的SWATH阻力情況
如圖2所示迭代7 000步左右時,兩種工況下的船舶阻力均已收斂,計算模型有效。航速增加時,雙體船的總阻力增加很快。
圖3為不同航速下的雙體船后自由液面興波形狀,圖中箭頭方向為船體航行方向,下文相同。船后自由液面產生的興波形狀,在一定情況下體現了船舶興波狀況的優劣,因此由圖3可以看出,航速從1 m/s增加到5 m/s后,船后興波最大高度從1.37 m變為1.49 m,由此得出雙體船周圍興波高度隨著航速的增加(相對于阻力的增加)增加不大,這證明了小水線面雙體船良好的興波性能。

圖3 FLUENT計算的雙體船船后興波形狀
表2為計算得到的粘性阻力系數和半理論、半經驗方法估算的粘性阻力系數比較,表中Cvj為經驗公式計算的Cv,Cvr為軟件計算的Cv。
從表2中可以看出兩種計算方法的阻力系數比較接近。這從一定程度上說明了用FLUENT軟件來預報SWATH粘性阻力是可行的。經驗公式估算方法固然可以用來預報SWATH船型的粘性阻力,但從估算公式(5)~(8)可以看到,經驗公式估算方法不能精確預報船型與粘性阻力的關系,更無法得到粘性繞流場的流動細節,因此運用FLUENT軟件計算船舶的阻力有其必要性。
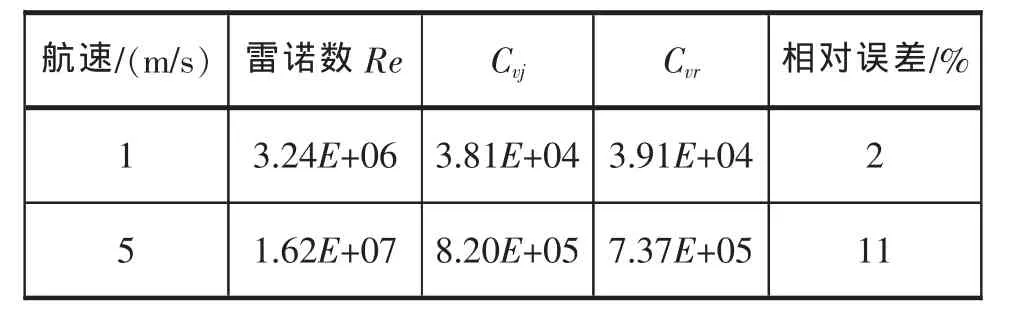
表2 FLUENT計算值與經驗公式比較
2 三體船的阻力性能研究
2.1 計算模型的建立
由于小水線面三體船與小水線面雙體船的型線非常相似,只是在其兩個片體中間再增加一個片體,所以為了快速建立小水線面三體船下體模型,可運用已有的小水線面雙體船型線進行改進[5-8]。以第1節中所述的小水線面雙體船為母型船,在其縱中剖面再增加一個相同的片體,圖4、圖5分別為本文所設計小水線面三體船中橫剖面圖及網格劃分。
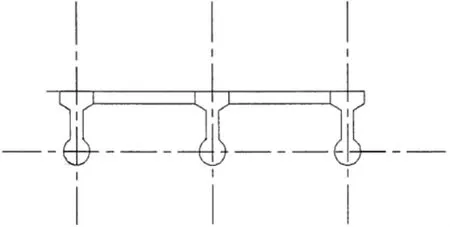
圖4 計算模型簡圖
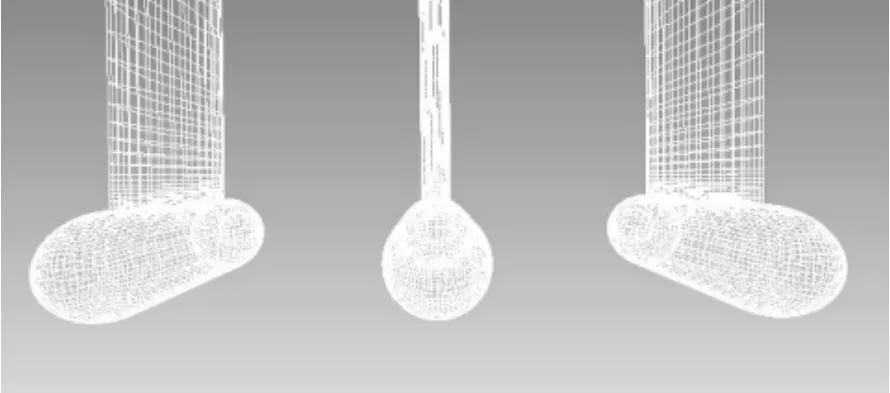
圖5 船體外網格劃分
2.2 計算結果分析
2.2.1 船體的阻力
選取1 m/s和5 m/s兩個速度進行計算,計算結果如圖6所示。
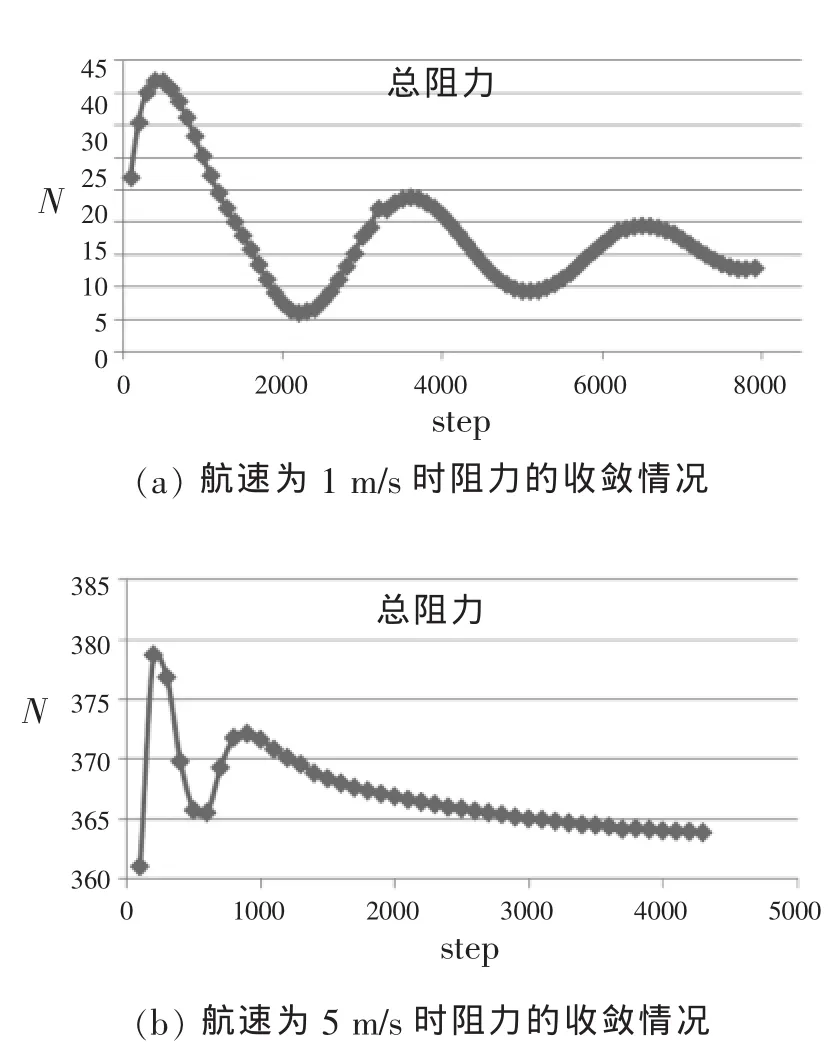
圖6 FLUNET計算的三體船阻力情況
由圖6可知,航速為5 m/s比航速為1 m/s時的總阻力要大得多,并且其收斂速度也較快。分析對比發現其主要原因為:在航速較高的情況下,總阻力中興波阻力占大部分,所以速度大時,興波阻力也大,并導致總阻力變大。同時比較圖6和圖3得到:在相同航速下,三體船的總阻力比雙體船明顯增大,這與三體船的水下濕表面積增大有關系。
2.2.2 船體的周圍流場分布
在不同速度下的三體船流場如圖7所示。

圖7 FLUENT計算的三體船船體周圍流線
從圖7中可以看出,隨著航速的增加,三體船側體產生的流線在流出船體后,產生遠離船體中縱剖面的趨勢。中體的流線變化趨勢不大。
FLUENT中并不能得到興波阻力的具體數值,但可以獲得船后產生的自由液面興波形狀,在一定情況下體現了船舶興波性能的優劣。圖8為不同航速下的三體船后自由液面興波形狀。
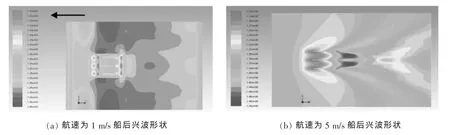
圖8 FLUENT計算的三體船船后興波形狀
將圖8與圖3比較可知,三體船速度從1 m/s增加到5 m/s時,船后興波最大高度從1.36 m增加到1.49 m。由圖8可以看出:在相同速度下,三體船的興波高度與雙體船相比差距不大,并沒有顯著提高其興波阻力特性。造成這種情況的原因可能是三體船的總體興波特性與中體的位置關系十分緊密,計算模型中,中體采取的位置并不能顯著提高三體船的興波性能,這在三體船設計過程中需要十分注意。
3 四體船阻力性能研究
3.1 計算模型的建立
由于雙體船的濕表面積很大,在高傅汝德數下,興波阻力增加很大,對其增加航行速度影響很大。通過研究發現,縮短雙體船水下部分的筒體長度可以有效提高船舶的高速運動性能[9]。關于四體船的實驗數據較少,Henri W.Zajic在《Optimization of an Advanced High Speed Hull Form》中對幾種小水線面四體船模型進行了船模試驗。本部分對其中一個模型M-2進行計算。其主尺度如表3所示。
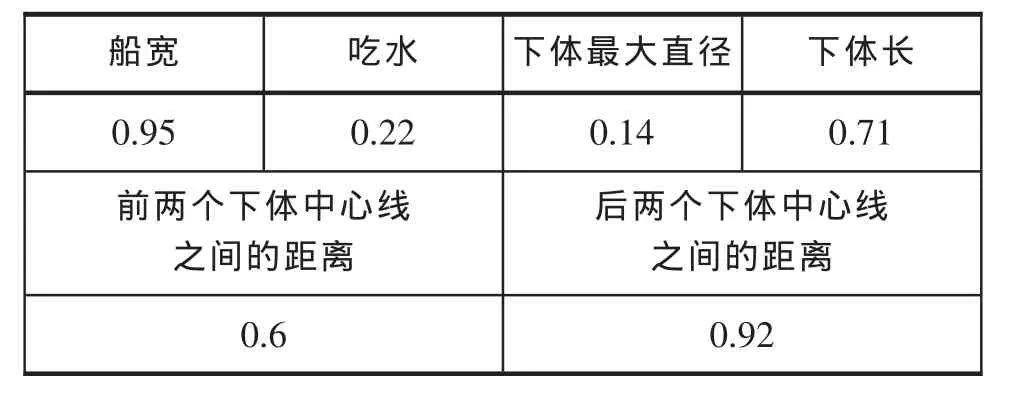
表3 四體船船模的型線尺度單位:m
具體來說,其下潛體是以NACA0020翼型為原型,在其中部加入一段矩形作為平行中體旋轉而得。其支柱為垂直于水面方向的等截面柱體,支柱的截面為NACA0010翼型。建立的模型如圖9所示。

圖9 四體船船型下體示意圖
網格劃分是借助GAMBIT來實現的。網格采用分塊結構化網格,計算域為一個長方體,縱向自船首向前延伸1倍船長,船尾向后延伸3倍船長;橫向由縱中剖面向兩側延伸1.2倍船長,從靜水面向下延伸1.1倍船長,向上延伸0.6倍的船長。由于對稱,計算域只取整個流域的一半。為了更好地捕捉流動特征,網格在船首、船尾和和靜水面附近進行了加密[3]。
3.2 船體的周圍流場分布
在不同速度下的四體船流場如圖10所示。

圖10 FLUENT計算的四體船船體周圍流線
從圖10中可以看出,起先,隨著航速的增加,前體產生的流線在流出船體后,趨近船體中縱剖面;隨著航速增加,這種現象反而開始減輕;當航速為5 m/s時,流線又回復為初始狀態,變為一條直線。說明船后流線的形狀隨著航速的增加在不斷變化。
表4為不同航速下四體船后興波最大高度。
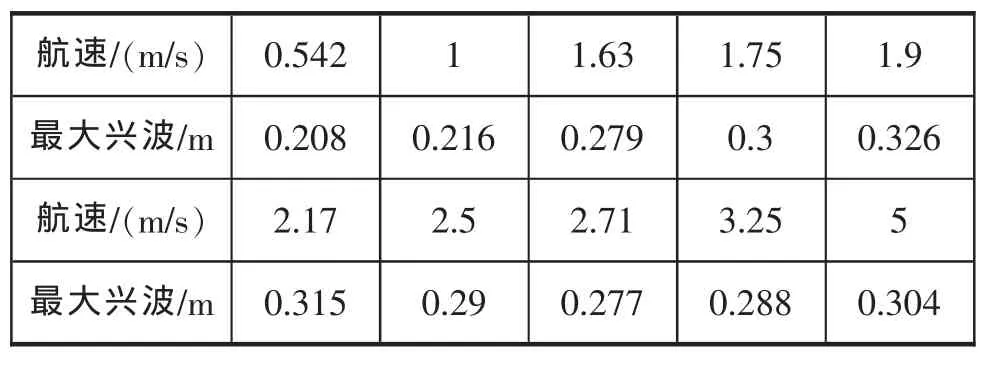
表4 不同航速下四體船的船后興波最大高度
FLUENT計算的四體船船后興波形狀如圖11所示。
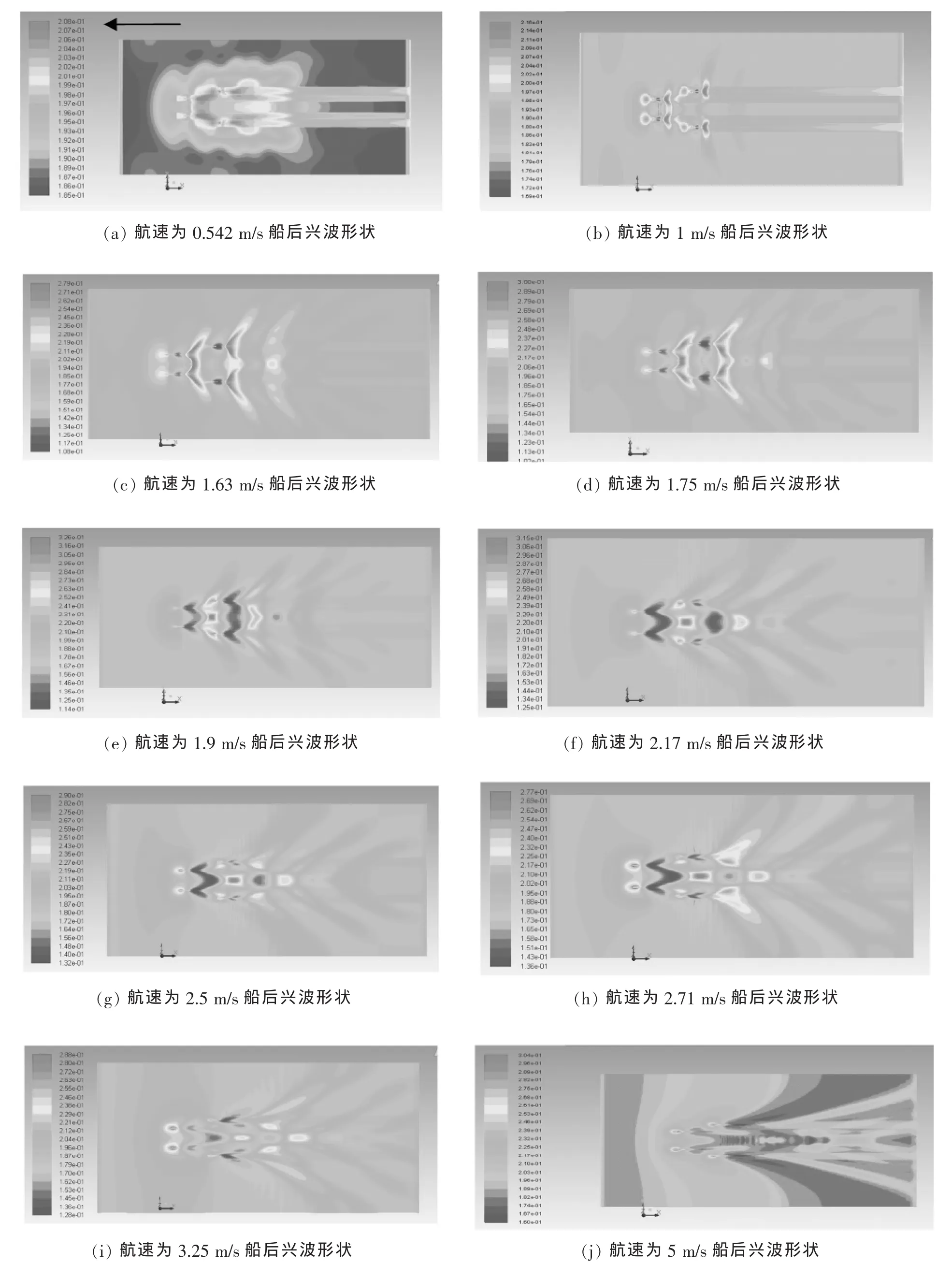
圖11 FLUENT計算的四體船船后興波形狀
從圖11中可以看出,隨著航速增加,自由表面興起的波浪也在不斷改變,航速在1.63~2.17 m/s的范圍內興波較大。四體船前體和后體興起的波浪相互疊加在一起,使得四體船后的自由面興起的波浪波形變得非常復雜。在低航速時,四體船前體興起的首個波峰和波谷相對靠前,而后體處于前體次波峰中,后體艏部及前體與后體之間興起的波浪波面較高,但是此時興起的波浪并沒有產生有利干擾(見圖11a)。隨著航速增加,四體船前體首個波峰和波谷開始逐漸向后移動,其后體也開始進入前體興起的波谷區域,此時其側體興起的波峰與主體產生的波谷相互疊加,抵消了一部分能量,所以在高航速下四體船興起的波浪會產生有利的干擾,見圖11(h)[10]。
3.3 計算值與實驗值對比分析
表5為FLUENT計算值與文獻中船模實驗的總阻力系數的比較。
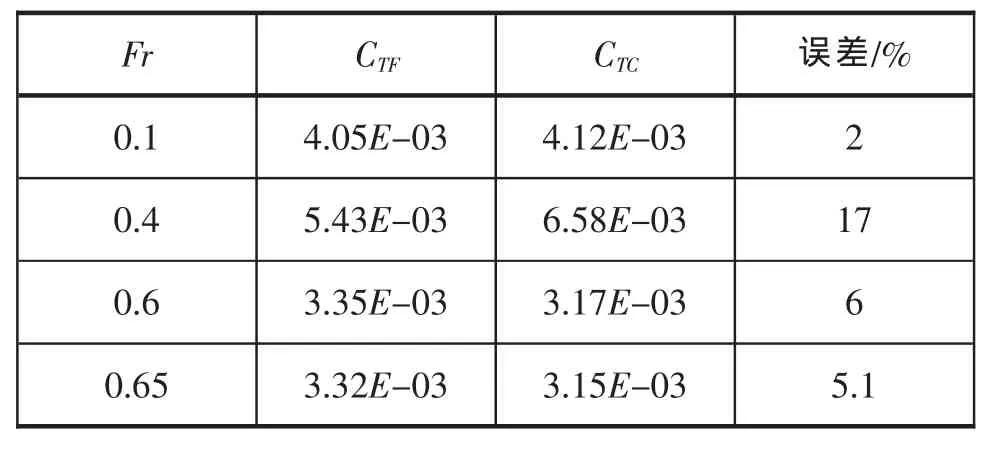
表5 四體船計算值與實驗值比較數
表 5 中:CT=2R/(ρU2L2), 下標 F 為 FLUENT 計算值,下標C為文獻中實驗值。從表中可以得知:在低Fr數和高Fr數時,FLUENT計算的阻力系數和模型試驗得到的阻力系數頗為吻合。總體而言,FLUENT計算結果與實驗值吻合不錯,說明了其計算結果的有效性。
4 結 論
(1)通過數值計算與雙體船粘性阻力的經驗公式對比,以及與四體船的實驗值進行比較,可以證明本文的數值模型能夠較有效地對多體船的阻力進行預報,同時計算的迭代過程具有相當高的收斂效率,通常迭代8 000步即可收斂;
(2)對于同一船型,隨著航速增加,船體所受的總阻力增大;
(3)三體船的中體位置選取對三體船的整體興波性能有很大影響。如果中體的位置選取不適當,相對雙體船來說,并不能顯著提升其興波性能;
(4)對于四體船,隨著航速的增加,其船后興波更加復雜:在低航速時,船后興波為不利干擾,增大到一定速度后,興波變為有利干擾。
但由于試驗條件限制,本文只是運用FLUENT對多體船的阻力進行初步研究,待日后應用船模試驗再做相關深入研究。
[1]阮振華.高性能船舶發展與對策[J].船舶,2001,11(4):6-16.
[2]鄭明.世界小水線面雙體船圖集[M].北京:中國船舶工業綜合技術經濟研究院.2002,(10):99-102.
[3]高慧穎.基于CFD的大型船舶球艏線型設計比較研究[D].哈爾濱工程大學碩士學位論文,2010.
[4]楊培青.近水面航行的潛艇阻力數值模擬[D].江蘇科技大學碩士學位論文,2007.
[5]郭俊偉.小水線面三體船結構水動力分析[D].大連理工大學碩士學位論文,2007.
[6]張雨新.小攻角斜側體三體船水動力性能數值模擬[D].哈爾濱工程大學碩士學位論文,2009.
[7]蔡新功.基于 Michell理論的多體船阻力計算[J].船舶,2007,18(2):5-10.
[8]朱東華.高速三體船結構設計問題[J].船舶,2010,21(2):30-33.
[9]方斌,高霄鵬,董祖舜.小水線面四體船的阻力特點分析[J].海軍工程大學學報,2003,5(1):70-75.
[10]黃德波,張雨新,鄧銳,等.單體與三體高速船舶粘性流場數值模擬[J]. 哈爾濱工程大學學報,2010,31(6):683-688.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30
