空間機構地面重力補償設備跟蹤研究
2012-06-08 05:05:12從強
航天器環境工程 2012年1期
關鍵詞:設備
從 強
(北京空間飛行器總體設計部,北京 100094)
0 引言
人類對太空探索的腳步加深和衛星應用的快速發展將空間飛行器技術不斷向前推進,飛行器的尺寸越來越大,對能源的需求不斷增加,對天線的增益和精度要求大幅提高,同時伴隨著諸如大型太空望遠鏡、在軌裝配、星際航行、太空武器等新需求的出現,對增強運載系統的運載能力提出越發迫切的要求。但運載系統的尺寸受限,不可能大幅增加,這就只能依靠空間機構技術來解決:飛行器在發射時折疊收攏,入軌后展開并形成規定的構型進行工作。
飛行器在軌道上運行或在其他星球上工作時,其所處的重力環境與地球表面差異很大。如地球軌道衛星所受的離心力與地球重力幾乎相抵,航天器處于微重力狀態,其重力加速度量級一般在10-3~10-4g;又如,月球表面的重力加速度約為地球表面的1/6,火星表面的重力加速度約為地球表面的1/3。雖然空間機構最終工作在微重力或其他星球重力場中,但其制造、測試都是在地球重力環境中進行的,而重力對空間機構的特性有巨大的影響。如何在地面確認空間機構在空間的性能和可靠性?這就提出了對重力補償設備的需求,即在地面實現對空間重力環境的模擬,以開展空間機構性能評價及相關研究。
1 實現重力補償的方法
重力補償的方法有很多種,主要有跌落法、拋物線飛行法、浮力法、氣墊法、懸吊法。
1.1 跌落法
落塔是地面進行跌落試驗的重要設施。試驗時將試驗物體從高塔上落下,利用物體在自由落體過程中所處的低重力或微重力環境來進行試驗,自由下落時間為2~5 s。落塔的試驗成本相對較低,是一種理想的研究設施。
表1列出了世界上主要落塔的參數,圖1是日本的JAMIC落塔,圖2是ZARM落塔的加速度-時間曲線。
在物體下落過程中,空氣阻力會產生比較大的影響,因此尋求減小空氣阻力影響很關鍵。

表1 世界上主要落塔的參數Table 1 Parameters of major falling towers in the world
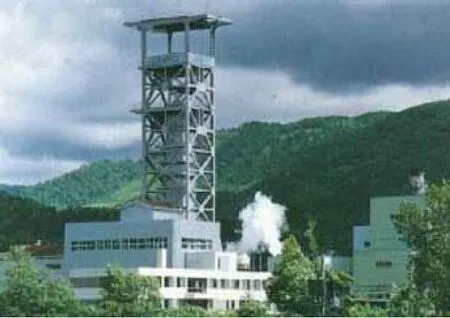
圖1 日本的JAMIC落塔Fig.1 JAMIC falling tower in Japan
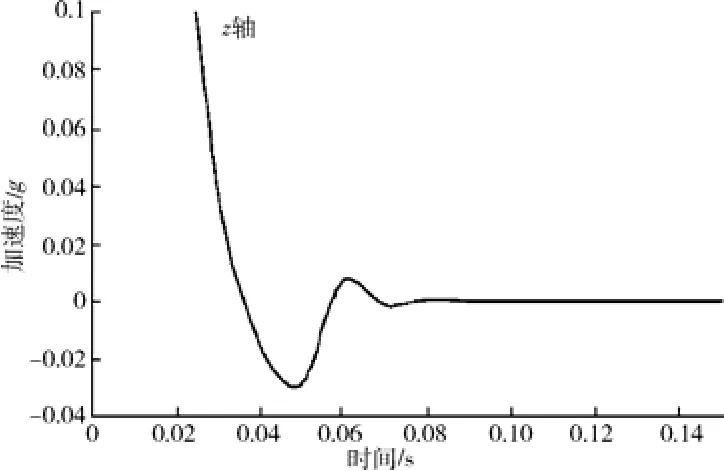
圖2 ZARM落塔的加速度-時間曲線Fig.2 The curve of acceleration versus time for ZARM falling tower
如果希望獲得更長的試驗時間,則可以使用氣球將試驗物體帶到高空,然后進行釋放,如此能獲得10-3g的微重力環境。當使用加裝推力器的落艙時,可以減小空氣阻力的影響,甚至獲得10-6g的微重力環境。
1.2 拋物線飛行法
拋物線飛行是指利用飛機在按拋物線彈道飛行過程中加速度的變化來進行試驗。利用拋物線飛行可以獲得零重力、月表重力(1/6g)、火星表面重力(1/3g),甚至是負重力。NASA和ESA都曾采用這種方式制造微重力環境并開展了相關試驗。圖3是一個典型的飛行拋物線。
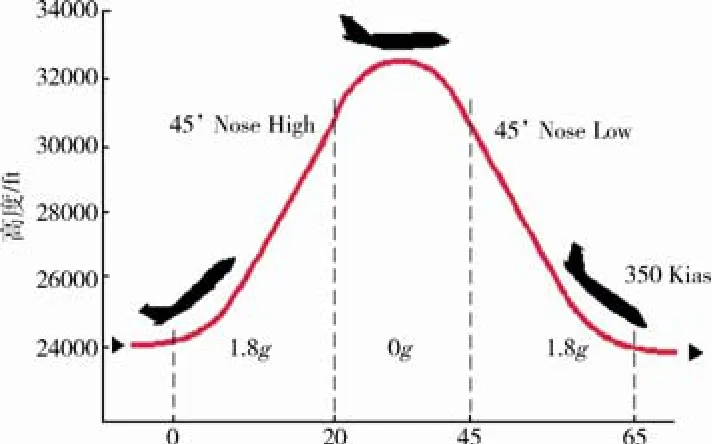
圖3 典型拋物線飛行曲線Fig.3 The curve of a typical parabolic flight
NASA約翰遜空間中心將波音707飛機(具有4個渦輪噴氣發動機)改裝成代號為 KC-135A的拋物線飛機。該飛機一天至少能夠完成40個拋物線飛行,每個拋物線飛行大約能提供20~25 s的低重力環境。圖4是KC-135A飛機機艙中漂浮的航天員。

圖4 KC-135A機艙中漂浮的航天員Fig.4 Astronauts floating in the KC-135A cabin
1.3 浮力法
可以利用空氣或水的浮力來全部或部分抵消地球重力來模擬失重環境,常用裝置有氦氣球、中性浮力設施(俗稱水槽)和水槽浮力系統。
1.3.1 氦氣球
氦氣密度為0.178 6 kg/m3,空氣密度為1.293 kg/m3。由于氦氣密度不到空氣密度的1/6,因此氦氣球在空氣中將獲得較大的浮力,這個力作用在試驗物體上就可以與重力相互抵消。
1.3.2 中性浮力設施
由于失重環境下的物體都處于漂浮狀態,因此可以利用水的浮力來模擬這種漂浮狀態,從而比較精確地模擬失重環境下力的作用與反作用特性。拋物線飛行獲得的微重力時間很短,僅有20~25 s,而中性浮力設施可以獲得任意模擬時間,是進行長時間空間任務訓練的唯一方法。
中性浮力設施一般由主容器(水槽)、供氣系統、供水系統、安全救生系統,以及照明、測試、通信、試驗服等配套系統組成。
水下模擬訓練與太空行走有著較大的差異。為了使身著壓力服的受試者在水下達到重力與浮力平衡(即所謂的中性浮力),需要在壓力服上施加幾十至 100 kg以上的鉛塊配重,配重的添加會對整個系統的質量分布產生重大的影響。由于水作用力的存在,航天員在水中可以利用游泳動作實現轉體甚至平移,但在太空是難以實現平移的。由于水的阻力與物體在水下運動的速度和加速度相關,因此試驗中要控制好動作的速度,不宜太快(應≤0.5 m/s),否則會帶來較大的誤差。必須對水下環境與空間環境的差異進行研究,可以利用計算機進行空間任務的力學特性仿真分析。
進行水下試驗時安全問題至關重要,要防止潛水病的發生,同時需要有專業的潛水員來保障安全。由于水的腐蝕性等問題,試驗中所使用的設備與真實的不可能完全一樣,需要根據情況進行必要的改造。
中性浮力設施主要用于航天員在軌操作訓練和空間機器人的測試,對太空操作時周邊設施和使用工具的設置是否合理、形狀設計是否科學、位置安排是否妥當等進行實際檢驗,對操作程序的合理性和實際效果進行檢查,包括空間機器人與航天員間配合程序的檢查。圖5是機械臂在水下進行測試試驗,圖6是航天員在水下進行訓練。

圖5 機械臂進行水下測試Fig.5 Robot arm being tested under water
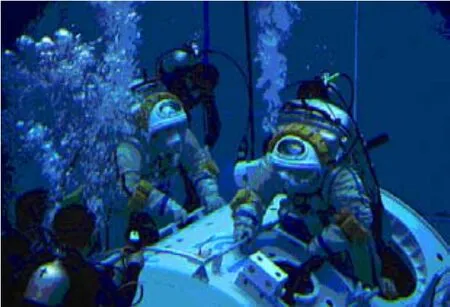
圖6 航天員在進行水下訓練Fig.6 Astronauts being trained under water
1.3.3 水槽浮力系統
利用漂浮物在水中受到的浮力來支撐物體,當物體做平行于水面的運動時,漂浮物跟隨進行運動。這種方法實施起來十分簡單,但只適合于速度極慢的展開系統,否則漂浮物在水中會受到較大的阻力,繼而影響到展開系統的運動特性。
1.4 氣墊法
氣墊也稱氣浮裝置,由氣源、承載平臺和若干個氣墊單元組成。利用氣墊單元將重物托起,并利用氣墊單元與承載平臺之間的流動空氣層來使移動阻力系數降到0.001~0.005,從而達到輕松移動的目的。在日常生活中它主要用于短距離搬運重物,也可用于船體對接、飛機裝配等要求定位準確的場合。
在通氣前氣墊單元與承載平臺接觸,壓縮空氣進入氣墊單元后,經由其內部的氣道到達底部并通過數個小孔排出,由此產生的浮力將物體托起并與其重力保持平衡。可以用調節閥來調節供氣量使氣墊單元升起離地0.025~0.25 mm(即氣隙),氣隙內的氣壓一般可達0.1~0.35 MPa。供氣量要合適,過多會產生顫動,過少則會使氣墊單元離地高度不足,移動阻力增大。
由于氣墊離開承載平臺的間隙很小,要求承載平臺平整無縫,平臺的宏觀起伏和微觀粗糙度都不允許超過規定值,否則會因漏氣而導致托不起重物。圖7所示的是氣墊的工作原理,圖8是衛星天線使用氣墊進行展開試驗。

圖7 氣墊工作原理Fig.7 Working principle of the air cushion

圖8 衛星天線使用氣墊進行展開試驗Fig.8 Using air cushion for the deploying test of a satellite antenna
1.5 懸吊法
懸吊法是在地面實現重力補償最常用的方法,它是通過懸吊系統給試驗物體施加一個通過其質心的集中力來抵消全部或部分重力。
圖9是一個典型的懸吊系統,由繩索、滑車、導軌、滑輪、配重等組成。懸吊系統作用在試驗件上的拉力大小可以通過配重來調整。拉力在試驗件上的作用點應通過質心,否則會產生附加的轉矩。滑車可以在導軌上滾動,以保證在試驗件運動的全過程都能夠抵消重力的影響。
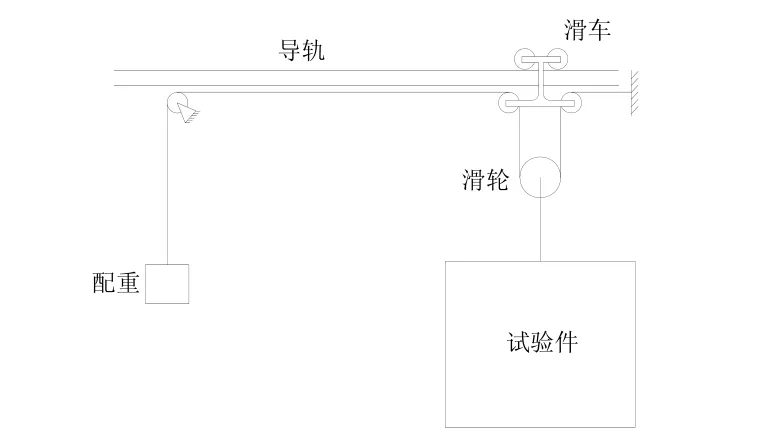
圖9 典型懸吊系統的組成和原理Fig.9 The configuration and principle of a typical suspension system
懸吊系統的具體形式有很多種,可以實現一維的直線運動,也可以實現二維的平面運動,甚至是三維空間運動;懸吊系統可以是被動式運動,也可以是主動式運動。各種形式在對待不同的試驗對象時可以靈活組合使用。圖10是伸展桿在進行一維直線運動展開試驗,圖11是桁架天線在進行二維平面運動展開試驗。

圖10 伸展桿在進行展開試驗Fig.10 Mast in the deployment test

圖11 展開后的桁架天線Fig.11 Truss antenna in the deployed state
2 常用的空間機構地面重力補償
跌落法可用的試驗時間短、空間小,一般不適合用于空間機構的重力補償;拋物線飛行雖然可以提供一個立體的無重力環境,但也存在著試驗時間短的問題,并且費用較高,目前主要用于航天員的訓練;中性浮力設施比較適合試驗對象運動復雜或不確定并且運動速度緩慢的情況,由于進行試驗的產品必須進行改裝,因此也不適合空間機構的重力補償,主要用于航天員和空間機器人模擬漂浮狀態的在軌操作測試。以上這些方法只是不太適合用于空間機構的重力補償,并不是不能用,前蘇聯就曾使用一架圖-104飛機進行拋物線飛行來模擬月球重力加速度,對車輪在月面的附著-牽引特性進行測試。
氣浮裝置、氦氣球、懸吊系統由于沒有作用時間和空間的限制、容易實現且資金需求少,目前常被用作空間機構地面重力補償設備。它們可以單獨使用,也可以組合使用。本章結合典型的空間機構對這幾種地面重力補償設備進行詳細介紹。
2.1 一維直線運動機構的地面重力補償方法
套筒式伸展桿、盤壓桿、鉸接桿等桿狀展開機構以及質心(或懸吊點)做直線運動的機構(如使用York架和聯動索的剛性太陽翼)進行的都是一維直線運動,其重力補償方法比較簡單,實現的途徑也很多。
圖12是幾種典型的直線運動重力補償設計原理,這些原理對其他的直線運動展開機構都是適用的。
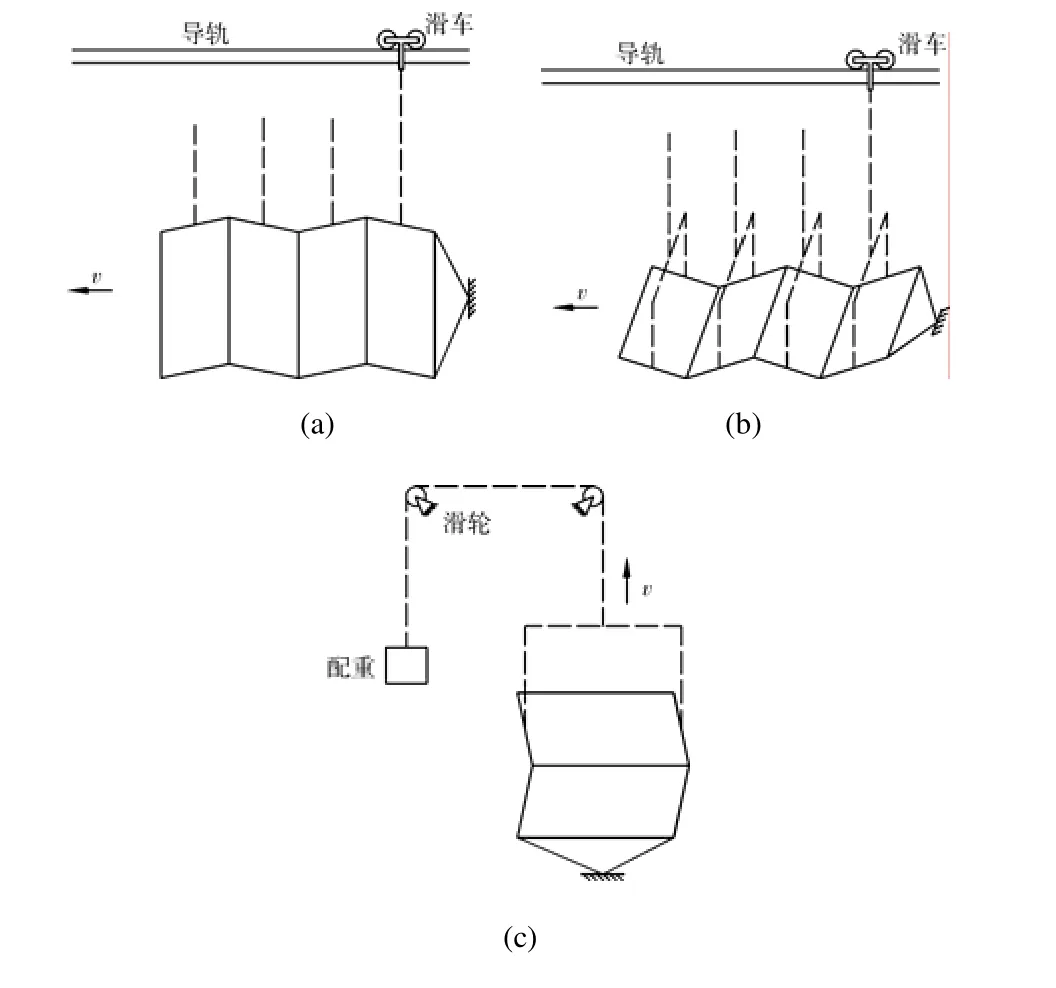
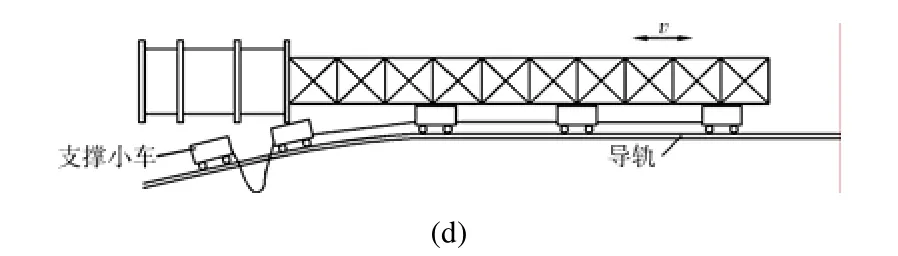
圖12 常用一維直線運動機構的地面重力補償Fig.12 The common ground gravity compensation equipment for one-dimensional linear motion mechanisms
2.2 二維平面運動機構的地面重力補償方式
拋物面天線、擺動機構、平板雷達天線、肋式網狀天線等機構的運動部件的軌跡是二維曲線,懸吊點需要在二維平面中運動。
圖13是以拋物面天線為例的3種二維曲線運動的重力補償設計原理,這些原理對其他的二維運動展開機構也是適用的。
圖13 常用二維曲線運動機構的地面重力補償Fig.13 The common ground gravity compensation equipment for two-dimensional planar motion mechanisms
2.3 三維空間運動機構的地面重力補償形式
機械臂、天線伸展臂、二維太陽能電池陣等串聯機構的末端運動部件的軌跡是空間曲線,懸吊點需要進行三維空間運動。
圖14是以兩個轉軸相互垂直的典型串聯機構為例的三維空間運動的重力補償設計原理,這些原理對其他的三維運動展開機構也是適用的。
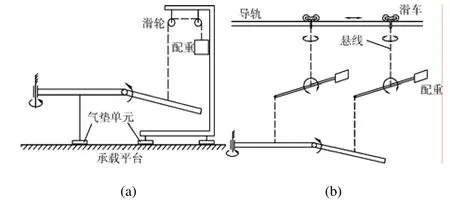

圖14 常用三維空間運動機構的地面重力補償Fig.14 The common ground gravity compensation equipment for three-dimensional spatial motion mechanisms
2.4 組合式地面重力補償
隨著需求的變化和技術的發展,新型空間機構層出不窮,其運動形式已不是簡單的一維、二維或三維運動,針對它們的地面重力補償設備也必須適應這種要求而作出專門的變化。
前面已經介紹了一些典型的地面重力補償的工作原理,復雜空間機構的地面重力補償設備都是由這些基本形式進行組合變化而來的,在實際工作中需要根據實際情況靈活應用。圖15列出了3種組合形式。

圖15 組合式地面重力補償Fig.15 Combined-type ground gravity compensation mechanisms
2.5 主動式地面重力補償方法
前面介紹的都是被動式地面重力補償方法,即支持機構展開用的滑車、擺臂、輪系等隨著機構部件的運動作跟隨性運動的地面重力補償。
由于地面設備中這些隨動部件給機構產品附加了摩擦阻力和慣性力,對機構產品的運動性能必然會產生或大或小的影響;當這種影響達到一定程度時,就需要考慮主動式地面重力補償了。主動式地面重力補償是指通過傳感器檢測機構部件的運動狀態,控制地面設備的執行機構使懸吊點對其進行主動跟隨,以保證懸吊點作用力始終在規定范圍內。
圖16是一個主動式懸吊地面重力補償系統,其中包括一個豎直方向的被動系統和一個水平方向的可控跟蹤系統。其工作原理為:角度傳感器實時測量出懸吊繩索偏離豎直方向的角度大小,并將該偏角信號傳給水平移動的電機控制系統;水平移動系統中的滑車在電機皮帶等的驅動下跟蹤機構部件的運動來減小這個偏轉角,以保持懸吊繩索的豎直。
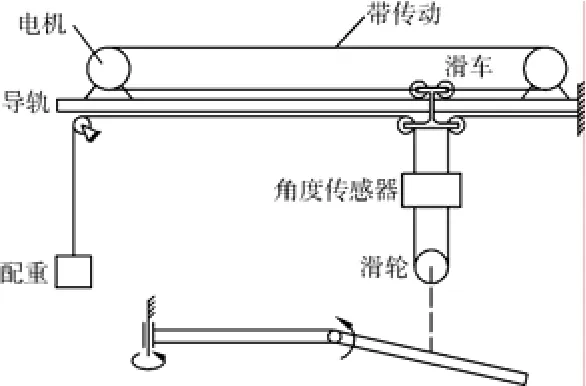
圖16 主動式地面重力補償系統Fig.16 An active gravity compensation system
3 地面重力補償的影響分析及設計原則
通過前面的介紹可以看出,雖然在地面實現重力補償的方法和形式多種多樣,但其一般共同點都是向試驗對象施加一個集中載荷來實現對重力的補償;這并不是真正意義上的“補償”,而只能算是“模擬”。地面試驗時引入的一些邊界條件是實際空間飛行時不存在的,這就必然會對機構的運動特性產生影響。如何盡量減少地面試驗時的附加影響,使地面試驗盡可能真實地反應機構在空間的運動特性,這是設計師必須面對和考慮的問題。
3.1 影響機構地面試驗時運動真實性的因素
機構在地面進行運動功能試驗時將受到下列因素的影響:
1)空氣阻力;
2)部件在受到集中作用力時產生內應力而導致結構變形;
3)地面設備附加的慣性負載;
4)作用力的大小與被平衡部分重量的偏差;
5)作用力偏離質心所產生的彎矩;
6)地面設備的摩擦阻力。
3.2 減小對運動真實性影響的方法
如何抑制上述若干因素對運動真實性的影響是進行地面重力補償方案設計時必須考慮的,需要采取措施將這些影響降低到可接受的程度。
1)空氣阻力的影響及對策
空氣對運動機構的阻力與迎風面積的大小成正比,與運動部件和空氣的相對速度的平方成正比。好在空間機構的運動速度一般都較慢,雖然有的運動部件(如板狀天線)的面積較大,但空氣阻力對其影響并不大。
面積較大的空間機構的運動試驗應在室內進行,試驗時關閉通風系統,使用氣球時也要特別注意風速的影響。
2)集中力作用下導致結構變形的影響及對策
地球重力是均勻作用在機構部件上的,而地面重力補償設備向機構部件施加的作用力都是集中力,由于空間機構部件都具有一定的柔性,必然會在其內部產生內應力從而導致結構變形,當變形達到一定程度時就會影響機構的運動特性。例如圖13(b)、13(c),若其中的板狀運動部件尺寸大、剛度小,那么就不適合采用這樣的懸吊設計。
要合理選擇運動部件上的懸吊/支撐點,使集中力施加于部件剛度較大的方向或者增加作用點的數量,以最大限度地減小結構變形。
3)地面設備附加的慣性負載的影響及對策
地面重力補償設備中的運動跟隨部件(如滑車、擺臂、氣墊、配重等)都是隨著機構部件的運動而運動,其動能來源于機構的驅動動力源。增加的慣性負載對于電機驅動的機構而言影響不大,但會增加彈簧驅動展開機構的展開時間。
設計中要盡量減小地面重力補償設備中的運動跟隨部件的質量,并要求空間機構動力源具有一定的余量,可以根據地面試驗結果結合仿真分析得出機構在軌的運動特性,必要時也可以使用主動式地面重力補償設備。
4)作用力大小偏差的影響及對策
由于機械誤差、測量誤差等以及摩擦等因素的存在,使得地面重力補償設備作用在運動部件上的力的大小必然存在偏差,從而不能完全平衡運動部件的重力,二力之差最終作用在運動副上,影響機構的運動特性。
應使用彈簧等低剛度零件作為地面重力補償設備與機構部件間的連接件,以減小機構運動過程中由于重力補償設備與機構部件間距離變化而引起的作用力的變化,也可以放寬對地面設備形狀精度的要求,降低制造難度。對于使用配重施加的作用力,則必須考慮減小滑輪摩擦阻力引起的作用力誤差。同時,機構部件也應具有一定的容差能力。
5)作用力偏離質心所產生的彎矩及對策影響
當作用力偏離運動部件的質心時會在運動部件上施加附加的彎矩,最終作用到運動副上。
需要準確獲取運動部件的質心位置,以確定作用力的作用點。如果確定出的作用力在運動部件上的作用點不適合進行連接,則需要在運動部件上適當的部位安裝配重,將運動部件質心移到希望的位置上去。增加的慣性負載需要由空間機構來承擔。
6)地面設備摩擦阻力的影響及對策
滑輪、擺臂在運動時都會受到與速度方向相反的摩擦阻力的作用,而其所消耗的能量最終都要由運動機構來提供,從而會影響機構的運動特性。
如果機構產品的“健壯性”很好,對地面設備摩擦阻力不敏感,不會導致對機構性能和可靠性的誤判,那么就不需要采取什么措施;反之,則需要有相應的辦法來將地面設備摩擦阻力減小到可接受的范圍內。
如果地面重力補償設備上的滑車等運動部件的速度方向是單向的,則可以使用“定滑輪+小砝碼配重”的方法來抵消摩擦阻力;或者將導軌傾斜一定的角度(如1 m長度傾斜2 mm),利用重力在速度方向的分量來抵消摩擦阻力。如果滑車等運動部件的速度方向是不確定的,就需要由空間機構自身來克服摩擦阻力的影響;一旦克服不了則需要采用主動式地面重力補償設備。
3.3 地面重力補償設備的設計原則
通過前面的分析,對地面重力補償設備的設計原則總結如下,這些原則實際上也是判斷地面重力補償設備設計是否成功的準則。
1)在空間機構運動全過程,作用力應在規定范圍內緩慢波動;
2)作用力或合作用力應始終通過被平衡部件的質心,或在質心附近規定的范圍內;
3)作用力不能使結構產生影響其運動性能的變形;
4)盡量減小對空間機構運動有影響的附加慣性負載和摩擦阻力作用;
5)重力補償后的剩余重力、地面設備的附加彎矩、附加慣性負載和摩擦阻力等對空間機構運動的影響,應控制在空間機構的承載能力范圍內。
4 地面重力補償的設計和實施過程
地面重力補償方案的確定應與空間機構產品的設計同步,只有這樣才能在地面試驗時更加協調、匹配,才能盡量真實地反映空間機構在空間工作重力環境下的運動狀態。
下面將地面重力補償的設計和實施過程簡單總結如下。
4.1 設計過程
1)空間機構設計師應提供必要的參數和要求給地面重力補償設備的設計師,如機構簡圖、外形尺寸、部件質量、質心位置、運動軌跡、運動時序、允許的作用力誤差、允許的附加載荷等。
2)根據機構部件的運動范圍、運動軌跡和運動時序初步制定幾種地面重力補償設備的結構形式,主要是根據本文第2章的內容確定重力補償形式,以滿足空間機構的運動軌跡要求,保證運動過程中沒有機械干涉。
3)根據本文 3.3節給出的的地面重力補償設備的設計原則對方案進行比較優化,通過分析確定作用力的大小和方向、作用位置、連接形式,同時滿足連接點自由度的要求;根據作用力誤差要求以及機械誤差、測量誤差的水平,確定地面重力補償設備與運動部件間的連接件剛度;根據允許的附加載荷,確定地面設備運動部件慣量大小和摩擦阻力大小的限值,并對設計的結果進行校核。
4)必要時,應建立空間機構地面試驗狀態的數學模型來進行運動學和動力學仿真分析。
4.2 實施過程
1)空間機構試驗件配平
配平的目的是:① 確定作用力作用在空間機構部件上的實際位置;② 確定調整質心位置使用的配重塊的大小和安裝位置;③ 確定作用力的大小。
將空間機構試驗件各部件懸掛起來,使用調整吊點位置和安裝配重塊的方法將部件姿態調整正確,如使轉軸水平或與大地垂直。記錄吊點位置、配重塊的質量和安裝位置、懸吊繩的張力。
需要特別注意的是:如果在配平工作結束后還需要在產品上安裝其他部件,如熱控多層、電纜,則在配平時需要稱取這些部件的質量,使用質量模擬件安裝在產品部件上參加配平工作,否則配平工作獲得的數據是不準確的。
2)地面重力補償設備的調整和測試
調試的目的是:① 確定地面重力補償設備中滑軌、轉軸、平臺等部件的形狀精度;② 確定地面設備中運動部件的摩擦阻力。
在地面重力補償設備與機構部件間的連接件上安裝與設計作用力一致的重物,移動重物進行調整并測量滑軌的直線度和水平度。對于擺臂形式的結構,將重物移動到最遠端,檢查擺臂軸線對大地的垂直度。而對于氣墊承載平臺,由于其剛度很大,因此不需使用重物,可以直接測量其平面度和水平度。
在連接件上安裝重物的情況下,測量地面設備中運動部件的摩擦阻力,以確定抵消摩擦影響的小砝碼的質量或者導軌的傾斜角度。
在地面設備調整完畢后,必要時可以使用簡化了的空間機構實物模型對地面重力補償設備進行檢驗,對運動過程的機械干涉進行檢查,對作用力進行全程監測,對運動過程進行錄像,為地面重力補償設備的進一步優化和調整提供依據。
3)空間機構的放置和調整
放置和調整的目的:① 確定空間機構與地面重力補償設備的空間關系;② 確定空間機構軸線與大地的關系;③ 調整空間機構部件與地面重力補償設備相應部件間作用力的大小。
將空間機構與地面重力補償設備進行對準,如將空間機構的轉軸與擺臂的轉軸對準、將直線運動的方向與導軌方向對準,以確定空間機構與地面重力補償設備的空間關系。
調整空間機構軸線對大地的水平或者垂直狀態并進行測量,應滿足規定的要求。
將空間機構的部件與地面重力補償設備中相應的部件進行連接,調整作用力的大小,同時通過傳感器、彈簧秤等測力元件進行檢測。
5 結束語
機構產品是空間飛行器的關鍵執行部件,在地面盡量真實地模擬空間重力環境以評價其運動性能和可靠性是十分必要和重要的。
空間機構產品設計師必須廣泛了解各種地面重力補償設備的原理和一般形式,深刻理解地面重力補償設備的設計原則,熟練掌握地面重力補償設備的設計和實施方法,同步、協調地開展地面重力補償設備與機構產品的設計、實施工作。只有這樣,才能更準確地模擬空間重力環境,才能更真實地反映空間機構的功能和性能,才能更深入地分析和理解試驗結果,才能更正確地作出結論和判斷,這對提高產品可靠性無疑具有重要的現實意義。
(References)
[1]張小蘇, 宗文波.國外空間微重力模擬試驗技術研究與應用[G]∥空間技術情報研究.北京: 中國空間技術研究院, 2007
[2]樊世超.月面力學環境試驗技術研究[G]∥空間技術情報研究.北京: 中國空間技術研究院, 2006
[3]陳必忠.國外大型空間輕質可展開構件及其展開試驗評述[G]∥空間技術情報研究.北京: 中國空間技術研究院, 1991
[4]柳寧, 李俊峰, 馮慶義, 等.水下人體模型和試驗驗證[C]//中國力學學會學術大會論文集, 2005
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00
