故障診斷信號的非平穩性
2012-06-15 09:10:30葛淼玄兆燕
華北理工大學學報(自然科學版) 2012年1期
葛淼,玄兆燕
(河北聯合大學機械工程學院,河北唐山 063009)
0 引言
隨著設備狀態監測和故障診斷研究的發展,所面臨的關鍵問題之一是如何對監測診斷中得到的機械動態信號的非平穩性進行有效的分析。在機械設備監測診斷中,需要將非平穩信號進行平穩化處理,主要采用基于平穩過程的經典信號處理方法,分別從時域或頻域給出統計平均結果,無法同時兼顧信號在時域和頻域中的全貌和局部化,因此無法對信號的非平穩性進行有效的分析和處理。顯然,研究處理非平穩性的實用方法是促使機械監測診斷不斷發展的客觀需要。
短時博里葉變換(STFT)缺乏細化能力,反映強烈瞬變信號的非平穩性功能不足;主分量自回歸譜有一定的時頻局部化功能,但對于非平穩信號分析能力不強;Wigner時頻分布具有對準平穩或非平穩信號分析的功能,但是具有交叉干涉項[1]。小波變換具有良好的時頻局部性,根據需要調整時間與頻率分辨率,具有多分辨率分析的特點。其時頻分析的結果同經典的分析方法有所不同,在高頻范圍內時間分辨率高,在低頻范圍內頻率分辨率高,在全頻帶內正交分解的結果,信息量既無冗余也不疏漏,尤其適合分析時變非平穩信號[2,3]。
本文利用時間-指數法來對故障信號進行非平穩性判定,找出非平穩階段,進而運用小波變換對非平穩信號進行分解和重構,有針對性地選取有關頻帶的信息,通過對重構信號的頻譜分析,提取出故障的典型特征。通過對旋轉機械的非平穩信號處理,證實了利用小波變換的方法進行故障診斷有很好的效果。
1 故障診斷信號的非平穩性分析
在信號處理中,平穩性主要是根據信號的統計量特征來衡量。若該信號各階統計量與時間無關,則稱該信號是平穩信號;若該信號某階統計量隨時間變化,則稱該信號為非平穩信號。在機械設備監測診斷中,準確地分辨信號的平穩性至關重要,只有對信號進行了非平穩判定才能選擇適合的分析方法和手段[4]。
1.1 時間-指數圖法
在分析階段,遞歸圖法常被用來診斷非平穩性是否存在,本文將提供了一種嶄新的方法——時間-指數法。它以在一組空間距離臨近點為對象,檢測以時間-指數ξ為函數的概率密度分布ρε(ξ)。基于重構相位空間的時域信息,在絕對時間域的不變測度里直接檢測所測物理量的相關性。對無論是計算機生成或者實驗確定的短時間序列數據進行檢測,這種時間-指數方法能很清晰分辨動態非平穩性,且對嵌入參數不敏感[5]。時間-指數法算法如下:
1)假設我們觀察一段長度為Ns的時域數據,并等間隔采樣。將數據歸一化,在[0,1]范圍內生成一個新的序列 {Si:i=1,2,……,Ns}。
2)用延遲時間 τ組成的坐標系重構一個 m維相位空間A,并且創建N個嵌入向量{xi=[Si,S1+τ,……S1+(m+1)τ]T:i=1,2,……,N}∈A,其中上標T表示轉置,N=Ns-(m-1)t。
3)在兩點xi和xj之間定義時間-指數D為(xi≠xj)

其中T(xj)=i代表點xi沿軌跡的時間定位i。
4)對于一個參照點xi∈A,在給定的空間距離ε1內找到xi所有的附近點的集合:

5)得到全部xi和xj∈Ui(ε1)之間的時間指數。通過式(1)計算在參照點xi和向量xj∈Ui(ε1)之間的時間-指數D,從而得到全體N(ε)的時間-指數,其總個數為:

6)從時間-指數的最小值到最大值將全體數據平分(K+1)等份,創建一個歸一化的概率密度分布函數:

式中,Nt=是全部計數總量,ξ∈[0,K]是標準化的時間-指數。
7)對于一個新的空間距離ε2,重復步驟3到6,得到相應的標準化概率密度分布ρε2(ξ)。對于不同空間距離εl(l=1,2……,L),這個過程重復L次。
8)相對標準化時間指數ξ的L個空間距離,可繪出這些概率密度分布ρεl(ξ)。
1.2 非平穩信號的判定
測試對象選用轉子實驗臺,實驗設備有DRVI快速可重組虛擬儀器平臺、加速度傳感器(YD-37)、加速度傳感器變送器和藍津數據采集儀組成。分別在800r/min、1000 r/min、1300 r/min、1500 r/min和1700 r/min轉速下測取正常轉動、偏心轉動的實驗數據,并且在加速、勻速和減速各個運行階段分別測取轉子振動值。
運用時間-指數法來對震動數據進行非平穩性判定,通過時間-指數法的判別標準,對有限的時域信號,它的概率密度分布值接近于直線且波動很小,即為平穩信號;如果概率密度函數形狀呈“V”型且具有一定程度上的幅值波動,說明此信號為非平穩信號。圖1至圖4分別給出了偏心轉子在1000r/min時的減速階段和勻速階段、1300 r/min加速階段和勻速階段的轉子振動值測試結果。
由圖1至圖4可見,加(減)速階段的概率密度分布波動很大,其兩端有很巨大的偏差,而勻速過程卻平滑很多。說明轉子變速過程中,它的振動信號是非平穩信號。由此可見,在變工況的旋轉機械工作中,轉子振動為非平穩性信號,可在這兩個階段進行非平穩性故障信號的分析研究。
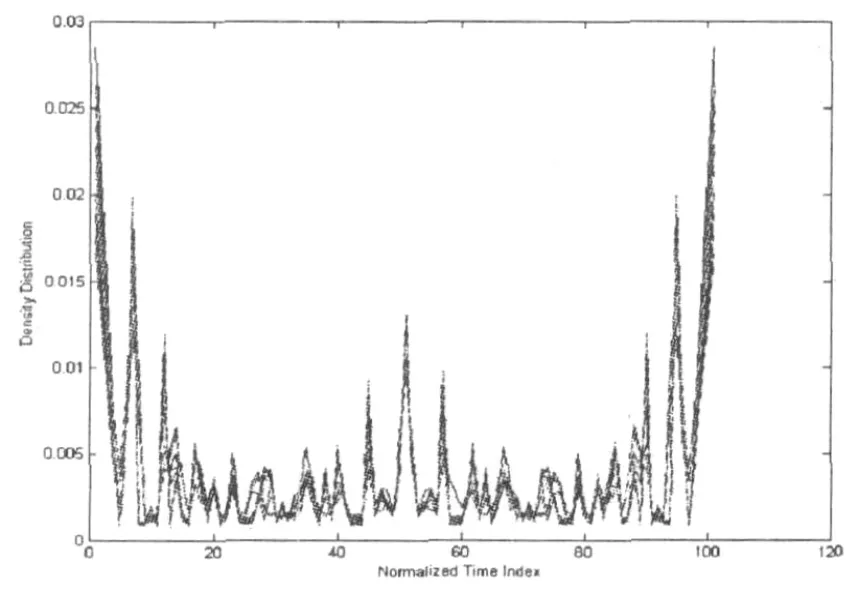
圖1 1000 r/min減速階段概率密度分布圖
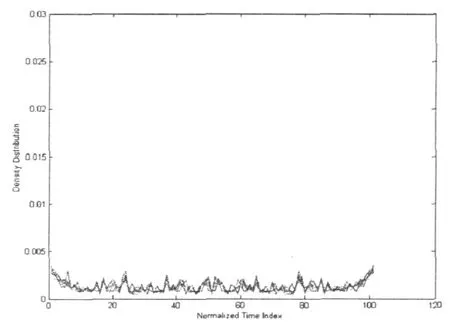
圖2 1000r/min勻速階段概率密度分布圖
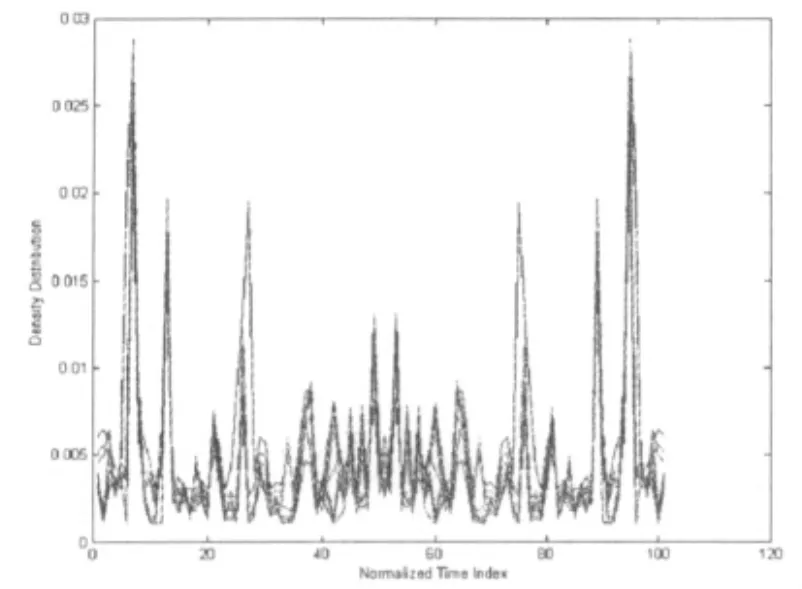
圖3 1300 r/min加速階段概率密度分布圖
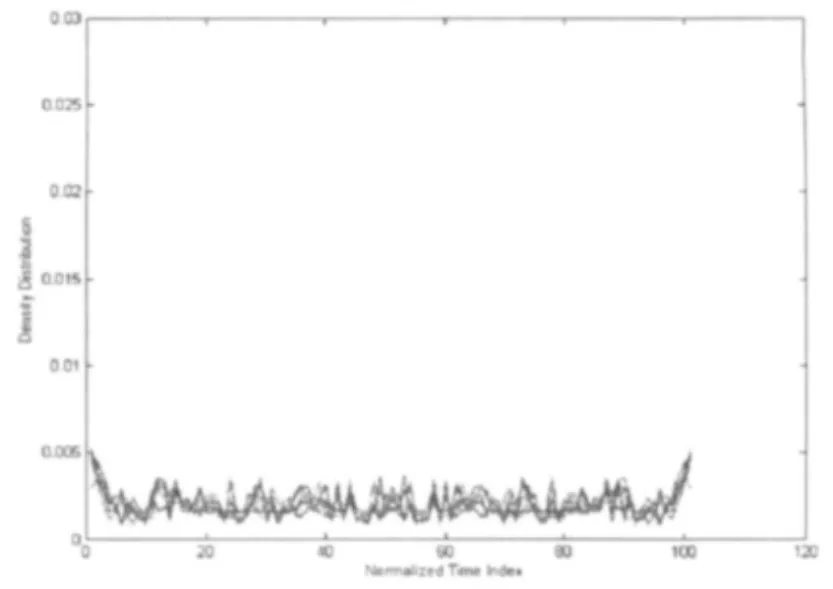
圖4 1300 r/min勻速階段概率密度分布圖
2 非平穩性故障信號分析
2.1 小波基本理論
假設函數ψ(t)∈L2(R),即平方可積,且積分平均等于零,則稱ψ為一個基小波。將母小波經過伸縮和平移后,就可以得到一個小波序列:

式中,a,b∈R,且a≠0;a稱為伸縮因子,b為平移因子。
在L2(R)中的閉子空間序列 {Vm}m∈Z∈l2為一個多分辨率分析,存在φ∈V0,將 { φ(t-k)}k∈Z構成的一個Riesz基,則總存在序列 {ck}k∈Z∈l2使得:




式中,表示濾波器h的共軛反轉;cj*表示與的卷積;U、D分別表示二元上、下二抽樣算子。小波分解與重構的迭代過程如圖5所示。

圖5 信號的小波分解與重構的迭代過程示意圖
2.2 FFT與小波分析比較研究
對故障信號用db3正交小波進行五層小波分解,分解結果如圖6所示,均為轉速1300r/min時加速階段的小波系數重構圖,其中a1-a5為低頻部分,d1-d5為高頻部分。圖6可以看出,原始振動信號很混亂,故障信號已經被噪聲完全淹沒。但是仔細觀察高頻重構的第三層會發現,波形有明顯的周期性波動,于是我們對第三層高頻重構部分進行頻譜分析。同時,為了對比小波分析對非平穩信號的處理能力,我們采用經典的快速傅里葉變換直接對原始數據進行頻譜分析,得到FFT頻譜圖如圖7所示。
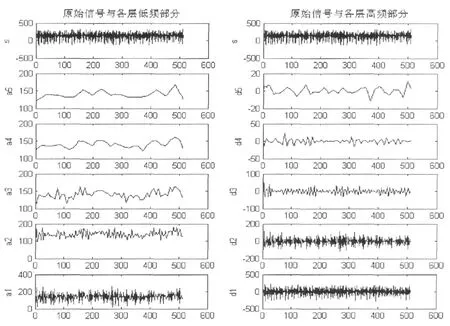
圖6 加速階段信號的小波重構圖
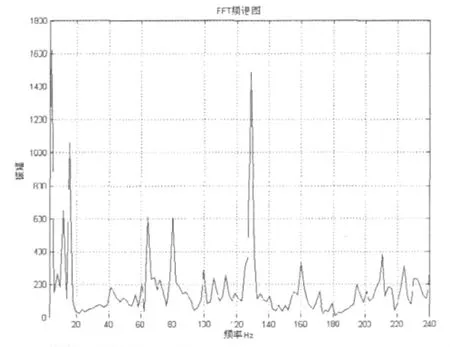
圖7 FFT頻譜圖

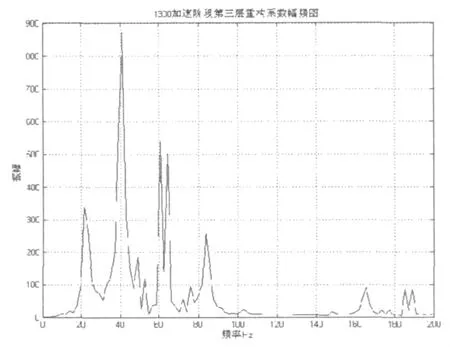
圖8 加速階段第三層重構系數頻譜圖
3 結論
介紹了非平穩信號的判定方法和小波分析對非平穩信號的故障診斷,采用時間-指數法確定其非平穩性,進而進行小波處理。通過對故障信號進行多尺度分解,分析各層小波系數,找出故障源。結果表明,時間-指數法很適用于信號的非平穩性判定,小波分析對非平穩性信號中故障的提取有著良好的效果。
[1]耿萌,石林鎖.三種非平穩信號時頻分析的方法[J].機械工程與自動化,2008,(1):108-109.
[2]李弼城,羅建書.小波分析及其應用[M].北京:電子工業出版社,2003.
[3]崔錦泰.小波分析導論[M].程正興譯.西安:西安交通大學出版社,1995.
[4]張賢達,保錚.非平穩信號分析與處理[M].北京:國防工業出版社,1998.
[5]Dejin Yu,Weiping Lu,Robert G.et al.Space time-index plots for probing dynamical nonstationarity[J]Physics Letters A,1998,250;323-327.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年18期)2018-11-14 01:48:24
電子制作(2018年11期)2018-08-04 03:25:42
山東工業技術(2016年15期)2016-12-01 05:31:22
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
汽車維修與保養(2015年6期)2015-04-17 03:31:50
