交通監(jiān)控系統(tǒng)中幀差法與背景差分法優(yōu)劣分析
2012-06-23 06:42:42尚緒鳳朱趙龍張賀泉
電子科技 2012年10期
關鍵詞:背景
孫 歡,尚緒鳳,朱趙龍,張賀泉
(中國計量學院理學院,浙江 杭州 310018)
新型監(jiān)控系統(tǒng)可以通過區(qū)分監(jiān)控對象的特征,主動收集數(shù)據(jù)、分析數(shù)據(jù),并根據(jù)預設條件執(zhí)行報警、記錄、分析等動作。實時地交通流量信息反饋,可以為道路擁塞高峰時期或緊急交通事故發(fā)生時的道路智能化調(diào)度管理提供依據(jù),從而減少道路擁塞,提高路面資源的利用率,最合理地利用現(xiàn)有的交通網(wǎng)絡。現(xiàn)就其中最簡單的車流量統(tǒng)計進行分析。圖像處理的過程分為圖像的預處理、背景的提取、檢測線的選取、結果分析[1-4]。文獻[5]利用Canny邊緣幀差法進行公交客流量統(tǒng)計。文中以杭州某地區(qū)內(nèi)的車流量為例進行分析。
1 幀差法和背景差分法優(yōu)劣性分析
1.1 圖像的預處理
先將視頻變?yōu)橐砸粠瑸殚g隔的圖片,具體方法如下:先讀入視頻,獲得總幀數(shù)并依次讀取。
之后進行灰度處理,得到預處理的值。然后將其進行邊緣檢測,如圖1所示。
圖1 進行邊緣檢測后的圖像
1.2 幀差法和背景差分法分析
1.2.1 幀差法和背景差分法理論比較
圖像提取的背景方法一般用于視頻車輛檢測技術。而相關視頻車輛檢測技術的方法如圖2所示。
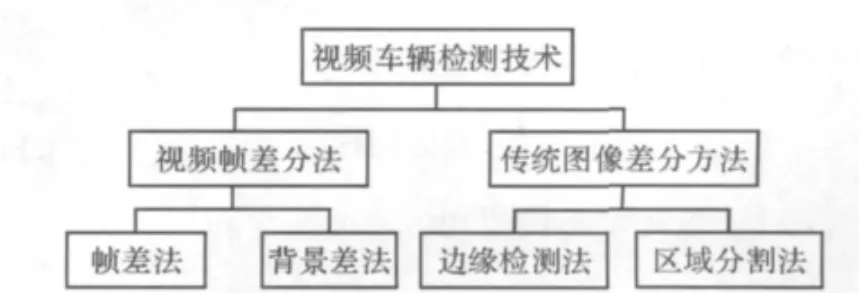
圖2 視頻車輛檢測技術分類
(1)幀差法的優(yōu)點是計算簡單且不易受環(huán)境光線變化的影響,但它不能檢測靜止車輛,且處理效果依賴于圖像采樣頻率以及被檢測車輛的車速。
如果運動速度較快,而選取的時間間隔過大,就會造成兩幀之間無覆蓋區(qū)域,從而無法檢測到運動物體;如果運動速度過慢,而選取的時間過小,則造成過度覆蓋,最壞的情況是物體幾乎完全重疊。
(2)背景差法分簡單差分和實時差分兩種。其中實時差分應用較廣,它可以根據(jù)環(huán)境的變化進行背景的變換。但要求設定閾值,且更新背景的方法也較繁雜。此方法適用于環(huán)境光照、陰影、風等自然因素變化較敏感的情況。設定閾值的方法較為復雜。而簡單差分適用于背景基本不變的情況。
1.2.2 幀差法和背景差分法應用比較
(1)幀差法。先將視頻轉(zhuǎn)化成的圖像數(shù)據(jù)化,再進行灰度處理,將視頻序列中每兩幀連續(xù)圖像逐像素相減,以去除基本不動的物體及背景。此時的情況與理想情況下相似,因此差分后圖像的非零部分表明對應像素發(fā)生了移動,由此可以將圖像中運動的車輛目標突顯出來。
另外,由于運動的車輛目標相對于路面平動而且方向與圖像平面平行,因而形成了簡單的二維平移運動。圖像幀之間的間隔非常短(0.04 s),可以認為車輛的各部分在圖像平面上的灰度基本保持不變。
將得到的差值矩陣進行二值差分處理,可以使得到的結果更準確

其中,T為閾值。
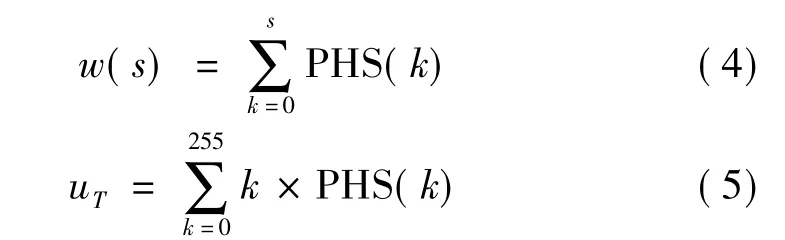
(2)閾值的選取。由于閾值選取相對繁瑣,所以選取其中一個較為簡單的方法進行計算,方法如下:均值比例閾值法是一種基于經(jīng)驗估計的閾值分割算法。設原始圖像的灰度級為L;灰度為i的像素點數(shù)為pi;圖像的全部像素數(shù)為N;那么圖像閾值計算過程如下:
(1)計算圖像的直方圖統(tǒng)計結果,得到灰度值為k的頻率朋PHS(k)為

(2)計算圖像的灰度均值

(3)計算灰度類均值和類直方圖之和
(4)計算分離指標

(5)求出使之達到最大的值s,則最佳閾值T=s,所以閾值為使得δB(k)最大的點的頻率朋對輸入圖像二值化處理

其中,T為閾值。
在實際場景中,每一幀的情況都不是人為所能夠預料的,所以一個固定的閾值不能解決變化中的實際問題。而上述方法能夠較好地解決這一問題。圖3為每幀間差分后的示意圖。
圖3 相鄰兩幀差分圖像效果示意圖
(3)簡單邊緣檢測法。將得到的背景分別與每組連續(xù)圖像差分,以得到去掉背景的目的,灰度化后差分得到的非零數(shù)值基本都是由于汽車移動引起的。
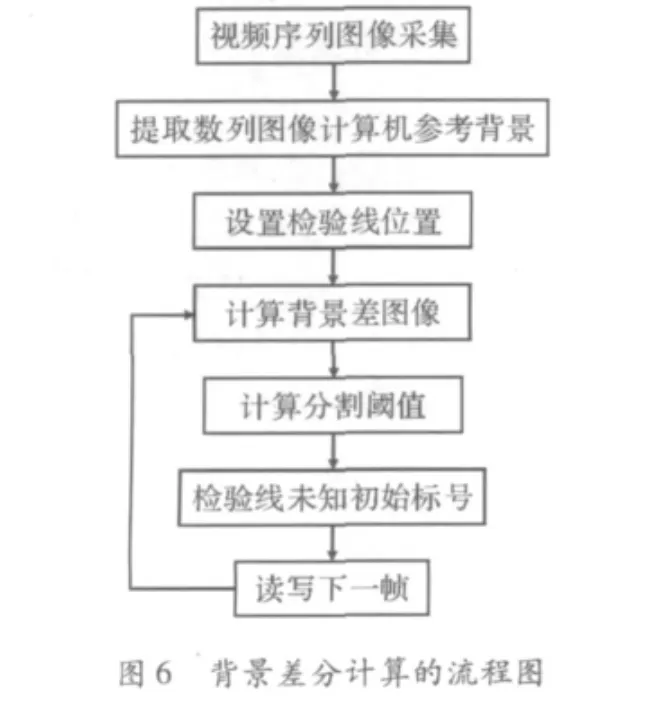
要做的背景差法是得到一個統(tǒng)一的背景,將當前待檢測的視頻幀和該背景進行逐像素相減作差分,差值圖像中非零的像素點表示了運動物體,由此可以實現(xiàn)運動車輛的較準確提取。即計算

其中,T為閾值。用此來判斷得出每組背景的矩陣。
采用閾值進行目標分割的目的是把運動車輛和微小變化的背景分開。閾值分全局閾值和局部閾值兩種,前者只用一個閾值對整個圖像進行二值化,后者先將一幀圖像劃分為若干個子圖像,對每個子圖像再確定相應的閾值。現(xiàn)實中需要根據(jù)序列圖像的背景復雜度進行選擇。在此部分研究的車輛運動的背景相對單一,所以使用全局閾值。
要得到背景,考慮到整個過程中背景變化不大,所以將得到的所有圖像的矩陣相加求均值得到其背景。
用均值法進行背景的計算:均值法,即在一段圖像序列中,取它們的平均值作為背景圖像即

其中,Backgroud(x,y)表示背景;image(x,y)表示每一幀的圖像。該算法簡單,計算方便。

圖4 整個過程中的背景圖
從圖5中可以看出有兩處亮點,分別是由時間變化和汽車位移變化引起的。時間變化不會引起后面車流量計算的誤差,所以此處亮點影響不大。通過對圖像的觀察發(fā)現(xiàn)背景變化較小。
2 車輛跟蹤及車流量問題
2.1 檢測線的選取
要進行車流量的檢測,檢測線的選取至關重要,它關系到預測的車流量與實際車流量之間是否會出現(xiàn)誤差,是否會出現(xiàn)對同一車次多次計算的可能。
選取檢測線原理:先固定一條線,此線必須和4個車道都全面接觸,且與水平面平行最好,將此直線分別代入由前面進行差分的點構成的圖形,檢驗是否有點在其直線上,若有點,則記為加1次,若無,則進行下一個圖形的判斷。直到所有圖都運行結束,得到的數(shù)即為車流量。
采用差分的方法得到檢測線。以下為用差分法求檢測線的步驟:
(1)選取視頻序列里任意一個圖片如圖7(a)所示,將其放入畫圖工具欄里。
(2)在圖上做出一條與水平面平行的直線,且與4個車道完全接觸,如圖7(b)所示。
(3)將圖7(a)與圖7(b)進行差分,得到的矩陣即為檢驗線矩陣。
(4)將檢驗線矩陣中的非零部分提取出來,得到檢驗線。
如圖7所示,將4通道“簡化”為單通道,通過人工標記檢測線,在Matlab中導入標記圖片和未標記圖片,然后對兩者做差分求取其差分矩陣,從而可以得到檢測線在288×352矩陣中的位置為第217行,第60列到352列的區(qū)域中。

圖7 檢測線的選取示意圖
3 結束語
表1為在各個時段下,應用背景差分和幀差法得到的預測車流量與真實車量的對比。
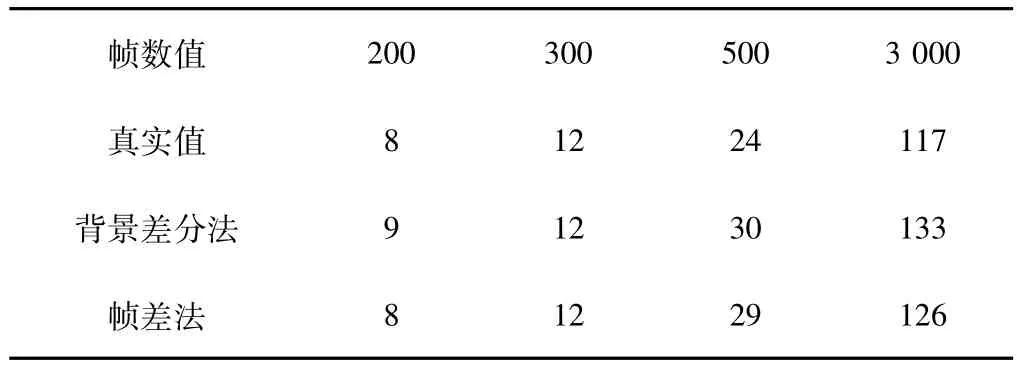
表1 各幀值下兩種方法的車流量預測與真實值對比
經(jīng)過對比,可以發(fā)現(xiàn)幀差法比背景差分法準確度高。這是因為幀差法為相鄰點間的視頻序列的差值,比背景差分法中任意時間序列與背景差值更精確。
因此,得出結論,在一般情況下,幀差法在處理交通檢測問題上更加準確。
[1]丁一,毛征,余歡.基于對比度的目標跟蹤系統(tǒng)及算法研究[J].中國科技論文在線,2005(6):323-329.
[2]王衛(wèi)峰,王昆,郝志峰.基于視頻的車流量統(tǒng)計算法計算[J].科學技術與工程,2011,11(17):4080 -4082.
[3]張永麗,張?zhí)劊吔?基于自適應背景初始化的車流量檢測算法[J].微電子學與計算機,2007,24(5):138-140.
[4]馬曉宇.基于視頻分割與跟蹤算法的車流量統(tǒng)計[D].杭州:浙江大學,2008.
[5]田牛,應捷.基于Canny邊緣幀差法的公交客流量統(tǒng)計[J].微計算機信息,2010(32):196 -198.
[6]武智霞,王化,王沛.基于H.264壓縮域的運動目標檢測算法[J].電子科技,2010,23(7):8 -10.
猜你喜歡
教學考試(高考化學)(2022年5期)2022-11-19 14:15:16
汽車工程師(2021年12期)2022-01-17 02:29:54
當代陜西(2020年14期)2021-01-08 09:30:42
奧秘(創(chuàng)新大賽)(2020年7期)2020-07-27 08:26:32
活力(2019年21期)2019-04-01 12:18:06
中國自行車(2018年10期)2018-11-30 02:09:04
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
紡織服裝流行趨勢展望(2016年1期)2016-05-04 03:45:20
語文知識(2015年11期)2015-02-28 22:01:59
中國衛(wèi)生(2014年10期)2014-11-12 13:10:16