數控機床中分頻段調壓的步進電機驅動設計
2012-07-04 09:42:40王悅善
制造業自動化 2012年11期
關鍵詞:單片機
王悅善
(重慶三峽學院,重慶 404004)
0 引言
步進電機具有僅有周期性誤差、精度高、能夠用改變脈沖頻率達到調速和正反轉控制等,因為這些顯著的特點,它已經成為機電一體化的一個重要產品,在自動化控制中得到廣泛運用。配合微電子及計算機的發展,尤其是數控系統對步進電機的需求日益增加,全世界都在大力發展這一技術,我國數控系統的發展也取得了不少進步,自主研發了適合國情的各種數控系統,這對于步進電機控制的研究也很重要。
1 數控機床設計
數控機床是一種裝有程序控制系統的自動化機床。它的控制系統可以處理控制編碼或者別的符號指令規定的程序,在進行譯碼,使得機床動作數控折彎機。
數控機床和普通機床比具有以下五個特點:
1)加工精度高,質量穩定;
2)多坐標聯動,能加工復雜零件;
3)遇到改變零件時,通常只要修改程序;
4)機床的剛性大、精度高,生產率高;
5)高程度的自動化,有效減輕勞動強度。
數控機床的分類按照控制方式可以分為開環控制、半閉環控制和閉環控制。開環控制不帶位置反饋裝置,本文介紹開環控制系統中的步進電機驅動器電路。
2 步進電機原理分析
2.1 步進電機概述
步進電機是一種受到脈沖信號控制,并將信
號轉化成直線位移或者角位移的控制電機。它可當做一種特殊的同步電動機,供給電脈沖,它的運動形式是步進式的,因此叫做步進電動機。
步進電機是改變脈沖頻率來調節電機的轉速,還可以快速起動、制動和反轉。其步距角和轉速均不會被電壓波動和負載變化影響。它在固定的步數下運動,因此其誤差步距不會長期積累。它廣泛用于數控開環系統中,簡單又可靠。
步進電機的優點主要有定位精度高,無步距累積誤差;開環運行機制降低了成本,可靠性高,在數控領域得到了廣泛的應用。但是,步進電機在低速運行時的噪聲和振動很大,在自然振蕩頻率附近運行時容易共振,輸出轉矩隨轉速的升高下降,需要通過改善驅動器來提升步進電機的性能。
2.2 步進電機驅動方式
步進電機驅動系統由步進電機、驅動器和控制器三大部分組成。當電機和負載確定后,驅動系統的性能就由驅動控制方式來決定。驅動方式具體可按如下分類:
1)恒電壓驅動方式
(1)單電壓驅動
在電機繞組過程中,只一個方向電壓供電。(2)高低壓驅動
使通電時繞組迅速至設定電流,關斷時繞組電流立刻衰減為零,又具有較高效率。
2)恒電流斬波驅動方式
(1)自激式恒電流斬波驅動
將繞組電流值轉化成一定比例的電壓,比較D/A轉換器的預設值,實現控制功率管的開關,控制繞組相電流。
(2)它激式恒電流斬波驅動
在D觸發器加一個固定頻率的時鐘來解決自激式的浪涌電壓問題,但仍然存在其它問題。
3)細分驅動方式
是步進電機驅動和控制的一大突破。細分驅動是每次脈沖切換時,只改變相應繞組中部分電流,合成磁勢也僅旋轉步距角的一部分。細分驅動時,繞組電流是階梯波,額定電流是臺階式的投入或切除。
2.3 工作原理
步進電動機的步距角越小,它能達到的位置精度越高。步矩角一般為1.5°或0.75°。因此要把轉子制成多極式,并在定子磁極上制成小齒,要和轉子磁極上的小齒規格完全相同。當一相定子磁極的小齒對齊轉子的齒時,其它兩相磁極的小齒都是錯過一個角度的。角度后一相比前一相的要大。

圖1 步進電動機工作原理示意圖
步距角的大小與通電方式和轉子齒數用公式計算:

Z為轉子齒數;m為運行拍數,一般等于相數或其數倍,即m=KN(N是電動機相數,K=1為單拍, K=2為雙拍)。
3 調頻調壓驅動
3.1 設計思路
步進電機在高電壓驅動時能夠獲得較好的高頻特性,但是當它在低頻工作時,由于繞組獲得能量過大,使力矩下降、噪聲加大,容易引起電機低頻振蕩甚至發生共振,使得步進電機可靠性降低,會因為電流太大而損壞電機。
本文提出的是利用單片機消除低頻振蕩,實現步進電機的調頻調壓,方法簡單,效果卻十分滿意。要讓電壓隨著工作頻率而變化,分頻段調壓是最簡單的方法,其中最少要將步進電機分成2段。具體的方法是用單片機8031和CD4051實現調頻調壓的步進電機。用8031檢測的脈沖頻率控制CD4051模擬開關,達到調整步進電機電源電壓的目的。分頻段調壓具有不容易發生誤操作和控制器配套方便的優點。
3.2 單片機
8031是最常見的MCS51系列的單片機系統,是INTEL公司最成熟的產品,應用范圍廣泛。它相當于一個微型計算機,將一個系統集成到芯片上。它是在線式實時控制、要求有較強的抗干擾能力,成本較低。它具有集成度高;結構簡單、使用方便、模塊化;可靠性強;功能強、速度快等優點。圖2為單片機8031的管腳圖。

圖2 8031管腳圖
3.3 CD4051模擬開關設計
CD4051是一個八選一的模擬開關。它是一個帶有禁止端和三位譯碼端控制的8路模擬開關電路;各個模擬開關都是雙向傳輸信號。圖3為CD4051的管腳圖。
各管腳功能如下:
CP 接CPU脈沖信號
POTO 接CPU+5V
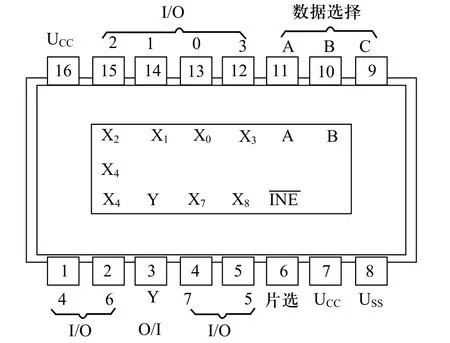
圖3 CD4051邏輯功能管腳圖
FREE 脫機,和CPU地線連接,驅動電源不工作
DIR 方向控制,電機反轉VCC 直流電源正端GND 直流電源負接A 連接電機引出線紅線B 連接電機引出線黃線
3.4 電路設計
圖4為單片機控制步進電機的原理圖。單片機提供三個控制信號給模擬開關:CP脈沖,一個讓電機轉動一個步距角;DIR,方向電平;FREE低電平時,脫機狀態,節省電源。

圖4 調頻調壓線路圖
圖中R0~R7 幾個電阻可以按照具體情況進行設置。按照脈沖頻率的變化,取到相應的電阻值,實現將步進電機的電源電壓分成幾段。模擬開關CD4051的二進制控制輸入端分別為A、B、C,不斷變換C, B, A的值(000~111),一共有8種狀態,選擇一種狀態,使得輸入和輸出接通。當禁止端(INH)=“1”,即不接通,斷開狀態,若INH=“0”,為接通狀態,其真值表為表1。

表1 CD4051真值表
4 結論
本文介紹了數控機床中開環控制系統用到的步進電機。詳細介紹了步進電機的原理及其驅動方式,然后選擇了調頻調壓的驅動方式來減輕或消除步進電機低頻振蕩的問題。使用單片機作為控制的核心,結合模擬開關,實現方法簡便、易于控制、操作可靠,具有廣闊的前景。
[1] 王玉琳.步進電機驅動的高低壓切換技術[J].機電工程, 2005 (10).
[2] 浣喜明, 姚為正.電力電子技術[M].北京: 高等教育出版社, 2004.
[3] 李瑋, 趙江, 劉建業.一種使用的單片機控制的數字式調速系統[J].吉林化工學院學報, 2002.
[4] 王侃夫.數控機床控制技術與系統[M].機械工業出版社, 2002.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
