應答著陸系統(tǒng)測角方案設計
2012-07-04 11:29:12楊益歡趙修斌
電光與控制 2012年6期
楊益歡, 趙修斌, 王 偉
(空軍工程大學電訊工程學院,西安 710077)
0 引言
應答著陸系統(tǒng)(Transponder Landing System,TLS),是為適應復雜場地環(huán)境和軍用移動導航,由美國ANPC公司研制的一種基于二次雷達應答機的精密進近著陸引導系統(tǒng)。系統(tǒng)通過發(fā)射1030 MHz的高頻詢問并接收飛機應答機1090 MHz的回答信號,采用相位干涉測角原理獲取飛機的方位和仰角信息。TLS彌補了儀表著陸系統(tǒng)(Instrument Landing System,ILS)的不足,克服了ILS對場地環(huán)境要求苛刻的缺點,只加裝地面設備,利用飛機現(xiàn)有的ILS接收機和二次雷達機載設備,不對飛機進行任何改動就可在復雜場地條件和臨時機場實現(xiàn)精密進近著陸。例如一些自然環(huán)境惡劣的山區(qū)機場、高原機場以及處于戰(zhàn)略要害的軍用機場等[1-3]。
基于早期的固定式應答著陸系統(tǒng)在美國華盛頓州、威斯康星州、新澤西州以及澳大利亞和菲律賓蘇比克灣等地的成功使用,ANPC公司又陸續(xù)發(fā)展了針對軍用移動導航的“螢火蟲”、“犀牛”移動式應答著陸系統(tǒng),但是,國內(nèi)還沒有引進該設備。因此,目前啟動對TLS的研制和相關(guān)問題的研究對我國軍民用航空的發(fā)展具有積極的意義和重要的價值。
一個精密進近著陸系統(tǒng)的關(guān)鍵是系統(tǒng)角度和距離的測量,應答著陸系統(tǒng)主要采用相位干涉式測角和詢問回答式測距原理。其中,角度測量技術(shù)是系統(tǒng)的關(guān)鍵技術(shù),傳統(tǒng)的應答著陸采用的是基于模擬電路的測角實現(xiàn)方案,測角精度相對較低。因此,根據(jù)系統(tǒng)測角原理設計更加合理的高精度角度測量方案,將為系統(tǒng)總體設計和技術(shù)實現(xiàn)奠定良好的基礎。
1 TLS測角基本原理
TLS采用相位干涉式測角法,兩個接收天線同時接收飛機的回答信號,不同方位上飛機應答器發(fā)射的無線電信號到兩個接收機的距離不同,因而相位也不同。只要測出它們的相位差就可確定飛機的方位(仰角)。
如圖1,假設兩個接收天線位分別于A,B兩點,它們之間的基線為d,應答信號入射角度為θ,并且RA>>d,RB>>d,若鑒相器測得飛機應答信號的相位差為Φ,應答信號的波長為λ,則有

由此可得飛機(仰角)角度為

從式(2)可以看出,測量飛機應答信號到達各接收天線的相位差便是系統(tǒng)測角的關(guān)鍵所在,所以整個測角方案的重點和難點就是如何設計高精度的鑒相系統(tǒng)。
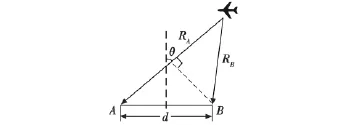
圖1 TLS測角基本原理圖Fig.1 Basic angle measurement principle of TLS
2 TLS測角技術(shù)方案
應答著陸系統(tǒng)的方位和仰角測量分別采用由3根天線組成的水平天線陣和由4根天線組成的垂直天線陣。根據(jù)應答著陸系統(tǒng)的基本測角原理,以天線陣中的一根為參考天線,分別求出其他天線與參考天線之間的相位差,便得到幾個不同分辨率的天線孔徑,然后通過解相位模糊算法得到飛機的角度信息。
隨著數(shù)字電路設計工藝和精度的不斷提高,傳統(tǒng)的基于模擬電路的測角方案已經(jīng)不能滿足高速、高精度的測角要求。根據(jù)系統(tǒng)測角原理,可以采用圖2所示的數(shù)字化測角原理進行分塊實現(xiàn)。
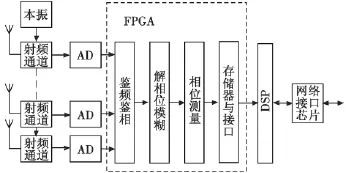
圖2 TLS測角方案總體框架圖Fig.2 The angle measurement scheme of TLS
飛機應答信號被天線陣列接收,經(jīng)過射頻通道與本地振蕩器產(chǎn)生的1030 MHz本振信號混頻,將接收信號下變頻到60 MHz的中頻,然后以適當?shù)念l率對中頻信號采樣量化成數(shù)字信號后,分為兩路送入FPGA進行數(shù)字鑒相和鑒頻處理,選擇1個參考通道,測量其他通道與參考通道間的相位差,對得到的各路相位差數(shù)據(jù)采用合理的算法進行相位模糊(多值性)的消除,得到精確的相位測量值,送入存儲器并在DSP處理器中解算獲取飛機方位和仰角信息;對數(shù)字鑒頻得到的頻率信息主要用來進行頻率誤差的補償。在DSP處理單元中將測量得到的飛機角度和距離信息與理想的下滑道信息相對比后,得到飛機位置偏差信息,將這些信息送入網(wǎng)絡接口芯片,用以太網(wǎng)絡的總線方式送入主機。
3 關(guān)鍵技術(shù)
3.1 數(shù)字下變頻技術(shù)
數(shù)字下變頻(DDC)[4-5]的中心思想就是將中頻A/D采樣信號與數(shù)控振蕩器(NCO)產(chǎn)生的本地數(shù)字中頻信號進行混頻,將其下變頻到基帶,以便于信號的后續(xù)鑒相處理。其原理框圖如圖3所示。
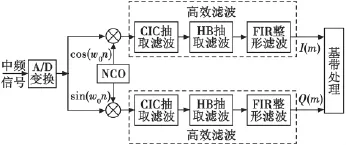
圖3 DDC原理框圖Fig.3 The principle diagram of DDC
設經(jīng)過A/D變換后的輸入樣本信號為x(n)=a(n)·ej[w0n+θ(n)],將其展開可得

式中:xI(n),xQ(n)分別表示輸入樣本的實部和虛部;w0為信號的載頻;ejw0n為數(shù)控振蕩器的輸出。根據(jù)頻移特性,混頻后信號x(n)的頻譜被搬移到了基帶,故有

在實際工程應用過程中,輸入信號一般都是實信號,信號的虛部應當為零,即

因此混頻器的實際輸出應當為

將其通過高效低通濾波器,濾除高頻分量后便得到了所需的基帶信號,以進行后續(xù)處理。
3.2 高精度的數(shù)字鑒相技術(shù)
各路應答信號經(jīng)過數(shù)字下變頻到基帶以后就可以開始進行鑒相處理,在得到基帶的I、Q兩路正交信號后,采用基于坐標旋轉(zhuǎn)數(shù)字計算機(CORDIC)的算法便可以實現(xiàn)該路應答信號相位的獲取。
3.2.1 CORDIC 算法的原理[6-7]
CORDIC算法是1959年由J.Voider等人提出的,用一系列迭代操作完成角度的旋轉(zhuǎn)計算,每一次迭代只采用加減法和移位操作,便于任意角度旋轉(zhuǎn)的FPGA技術(shù)實現(xiàn)。其算法原理如下。
將向量(Xj,Yj)旋轉(zhuǎn)θ角,得到一個新的向量(Xk,Yk),如圖4所示。
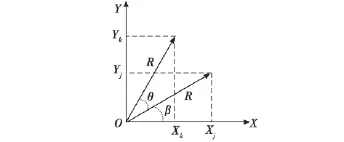
圖4 向量旋轉(zhuǎn)坐標圖Fig.4 Sketch map of vector coordinate rotation
那么有

寫成矩陣形式為

假設θ是由n個θi角度疊加而成的。即令θ=,其中di表示旋轉(zhuǎn)的方向,當順時針旋轉(zhuǎn)時,di=-1;當逆時針旋轉(zhuǎn)時,di=+1,為了便于硬件的數(shù)字實現(xiàn),將每次的旋轉(zhuǎn)角度 θi加以限制,使得 θi=arctan 2-i,這樣式(8)變?yōu)?/p>
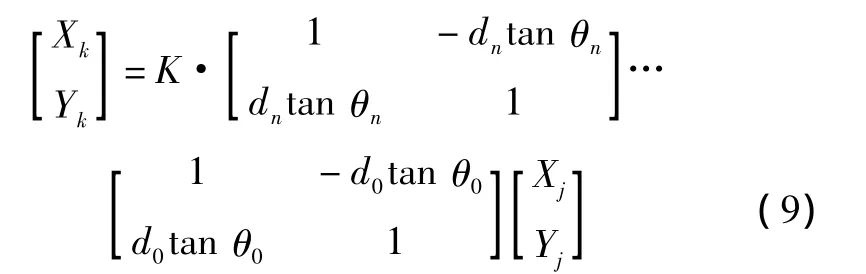
其中,K=cos θn…cos θ1·cos最終收斂于0.6073(當?shù)螖?shù)趨于無窮的時候)。因此這個旋轉(zhuǎn)算法需要一個調(diào)整增益An,其值為收斂值0.6073的倒數(shù)即1.647。實際上,調(diào)整增益是取決于迭代次數(shù)的。
對于FPGA來說,式(9)中帶tan項的乘法操作就可以被簡化為n次簡單的移位操作。通過一系列基本角度單元實現(xiàn),可完成任意角度的旋轉(zhuǎn)。
從式(9)可見,每一次迭代旋轉(zhuǎn)可以表示為
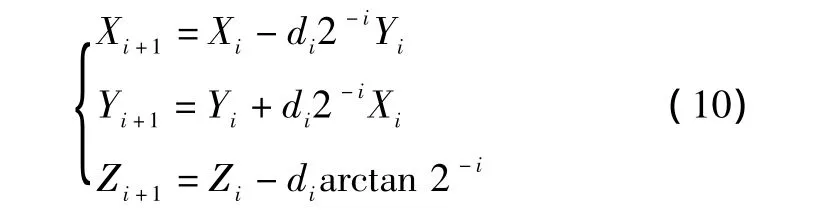
其中,Zi+1表示每一次迭代后的累加角度。
在向量化模式下,CORDIC旋轉(zhuǎn)器對輸入向量進行必要角度的旋轉(zhuǎn),使得向量最終調(diào)整到x軸上。即第i次旋轉(zhuǎn)的角度為arctan 2-i,旋轉(zhuǎn)的方向由Yi決定,若 Yi<0,則 di=+1;若 Yi>0,則 di=-1,最終使Yi→0。式(10)迭代的最終結(jié)果為
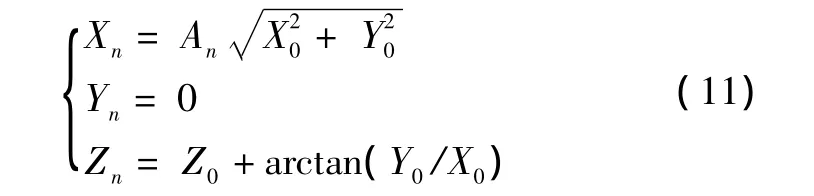
在式(11)中,令角度累加器的初始值Z0=0,則有Zn=arctan(Y0/X0)。即當?shù)瓿蓵r,Zn的值即為初始輸入X0、Y0的反正切值。
3.2.2 鑒相器設計
經(jīng)過數(shù)字下變頻后,可將每1路應答信號都分解為I、Q兩路的正交信號,如果將兩路正交信號相比,即可得到該路信號相位的正切值,再利用CORDIC算法的原理就可以得到每路信號的精確相位,然后求解各路相位差并作解模糊處理就可得到精確的相位差。TLS數(shù)字鑒相的設計方案如圖5所示。

圖5 TLS數(shù)字鑒相原理框圖Fig.5 Digital phase detection principle of TLS
以方位天線測角為例,每個陣元接收到的應答信號都可以分解為兩路正交信號,經(jīng)過CORDIC算法以后可以得到φ1、φ2、φ3三個不同的相位,以其中一個作為參考(如 φ1),通過比較器計算出 φ2、φ3與 φ1之間的相位差Φ1、Φ2,并將其送到基站計算機的FPGA模塊進行解相位模糊處理,得到精確的相位差Φ。再通過式(2)即可準確地計算出飛機的方位信息。
因此,如何設計快速有效的CORDIC算法的結(jié)構(gòu)將是整個鑒相過程的關(guān)鍵。CORDIC算法主要有簡單狀態(tài)機和高速全流水線結(jié)構(gòu)[8]。簡單狀態(tài)機結(jié)構(gòu)主要采用折疊/迭代方式,在每個周期內(nèi)都將精確地計算一次式(10)的迭代,計算速度慢,迭代時設計的筒形移位器復雜。流水線CORDIC結(jié)構(gòu)雖然占用的硬件資源較多,但是流水線結(jié)構(gòu)可以提高數(shù)據(jù)的吞吐率,從FPGA發(fā)展趨勢看,芯片內(nèi)的門資源相對富裕,對流水線CORDIC的實現(xiàn)規(guī)模約束較小,流水線結(jié)構(gòu)不存在迭代式CORDIC的反饋回路,使得單元結(jié)構(gòu)更加規(guī)則,有利于FPGA實現(xiàn)。
考慮到系統(tǒng)的實時性和時效性,鑒相器采用圖6所示的CORDIC流水線結(jié)構(gòu)[9-10]來進行硬件實現(xiàn)。
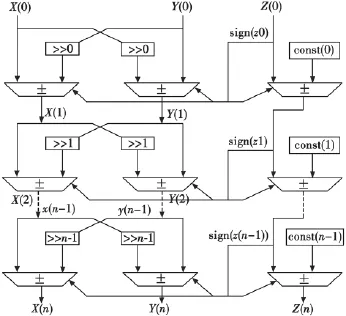
圖6 鑒相器CORDIC算法的流水線結(jié)構(gòu)圖Fig.6 Pipelining diagram of CORDIC algorithm
如圖6,將xI(n)、xQ(n)分別看作是X(n)和Y(n),并取Z(0)=0,經(jīng)過上述流水線結(jié)構(gòu)迭代n次后使得Y(n)=0,此時得到的Z(n)的值就是所需的每路應答信號對應的相位值。
4 仿真分析
根據(jù)以上分析和鑒相器原理,通過QuartusⅡ軟件可以設計出鑒相器的功能模塊[11]。
根據(jù)應答著陸系統(tǒng)的信號格式,模擬兩組經(jīng)過中頻接收和數(shù)字下變頻后的信號數(shù)據(jù)分別輸入到FPGA實現(xiàn)的鑒相器程序,并在CORDIC算法上采用12位數(shù)據(jù)進行多次迭代,將每次的仿真結(jié)果與理論值比較得到多個鑒相誤差值,再通過求算術(shù)平均的方法就可得到迭代次數(shù)與鑒相誤差的關(guān)系如圖7所示。
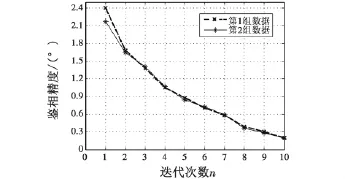
圖7 鑒相精度與迭代次數(shù)的關(guān)系Fig.7 Phase detector precision vs iteration times
可以看出,經(jīng)過8次迭代后,鑒相誤差就達到了(0°,0.5°)的水平,滿足了系統(tǒng)角度測量的要求,同時也可以看出鑒相器的精度與輸入的數(shù)據(jù)基本無關(guān),也就是說鑒相器的穩(wěn)定度較高。為了直觀起見,對兩組數(shù)據(jù)分別進行8次迭代的仿真實驗結(jié)果如圖8、9所示。

圖8 TLS高精度鑒相器仿真結(jié)果1Fig.8 Result 1 of TLS high precision digital phase detector simulation
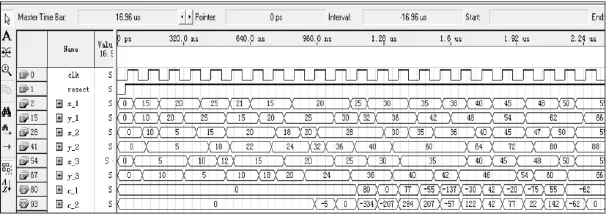
圖9 TLS高精度鑒相器仿真結(jié)果2Fig.9 Result 2 of TLS high precision digital phase detector simulation
圖8、圖9 中,x_1、y_1,x_2、y_2,x_3、y_3 分別表示3路信號經(jīng)數(shù)字下變頻后得到的基帶數(shù)據(jù),也是鑒相器的3路輸入,c_1、c_2分別為參考信號與其他兩路信號的相位差。圖中的數(shù)字表示的是由12位0、1序列構(gòu)成的二進制數(shù),只要根據(jù)設計程序中的對應關(guān)系就可以非常容易地獲得相應的相位差的度數(shù)。通過對8次迭代結(jié)果的分析,雖然輸出的兩路相位差存在時延,但是最大時延只有960 ns,對整個角度測量過程沒有影響。對比仿真結(jié)果與理論值得到的誤差為0.4°,符合圖7所示的曲線關(guān)系。因此,該設計方案既能夠達到系統(tǒng)所需的測角精度,同時又說明了本設計方案的可行性和有效性。
5 結(jié)束語
筆者在分析TLS測角基本原理的基礎上,設計了數(shù)字電路測角系統(tǒng)的實現(xiàn)方案。根據(jù)設計方案,重點分析了數(shù)字下變頻和高精度數(shù)字鑒相等關(guān)鍵技術(shù)及其實現(xiàn)方法。以FPGA為基礎,通過流水線結(jié)構(gòu)的CORDIC算法實現(xiàn)了應答信號的鑒相過程,并在QuartusⅡ環(huán)境下進行了方案的計算機仿真,仿真結(jié)果證明,該方案不但能夠滿足系統(tǒng)角度測量的精度要求,而且易于實現(xiàn),說明了該設計方案是可行、有效的。
[1]于向東.適于地形復雜機場的應答著陸系統(tǒng)[J].國際航空,2004,24(9):52-53.
[2]駱慈孟,徐勇.TLS-跨世紀的精密進近導航系統(tǒng)[J].民航經(jīng)濟與技術(shù),1994,26(8):30-31.
[3]WINNER K.Application of the Transponder Landing System to Achieve Airport Accessibility[EB/OL].2010-10-22.http://www.ANPC.com.
[4]粟欣,許希斌.軟件無線電原理與技術(shù)[M].北京:人民郵電出版社,2010.
[5]姚元飛,佟力,嚴國榮.S模式機載應答機的中頻數(shù)字化處理[J].電訊技術(shù),2009,49(6):70-73.
[6]嚴平,汪學剛,錢路.一種基于CORDIC算法的高速高精度數(shù)字鑒相器[J].電訊技術(shù),2008,48(4):76-79.
[7]張?zhí)扈?低復雜度的改進型CORDIC算法研究[J].陜西科技大學學報,2009,27(5):93-99.
[8]駱艷卜,張會生,張斌,等.一種CORDIC算法的FPGA實現(xiàn)[J].計算機仿真,2009,26(9):305-307.
[9]楊宇,毛志剛,來逢春.一種改進的流水線CORDIC算法結(jié)構(gòu)[J].微處理機,2006,8(4):10-13.
[10]郭立浩,段哲民,白森.采用CORDIC算法的直接數(shù)字頻率合成器的設計[J].電光與控制,2006,13(5):71-79.
[11]王金明,周順.數(shù)字系統(tǒng)設計與VHDL[M].北京:電子工業(yè)出版社,2010.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
環(huán)球時報(2022-05-30)2022-05-30 15:16:57
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
當代陜西(2019年11期)2019-06-24 03:40:28
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
