數(shù)字電源模糊自適應(yīng)PID控制算法仿真研究
2012-07-05 08:34:40張小慶彭彧華唐小英劉偉峰
電源技術(shù) 2012年11期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
張小慶,彭彧華,唐小英,劉偉峰
(北京理工大學(xué)生命學(xué)院,北京 100081)
相比較于傳統(tǒng)的開(kāi)關(guān)電源,數(shù)字電源具有設(shè)計(jì)周期短,控制方法靈活,易于實(shí)現(xiàn)模塊化管理,能夠消除因離散元件引起的不穩(wěn)定和電子干擾的特點(diǎn)[1],所以數(shù)字電源是開(kāi)關(guān)電源的一個(gè)發(fā)展趨勢(shì)。數(shù)字電源的控制模塊對(duì)數(shù)字電源的性能有著重大的影響,目前數(shù)字電源的控制方法一般采用簡(jiǎn)單的數(shù)字PID控制算法。但是,傳統(tǒng)的PID算法是一種線性控制算法,在控制數(shù)字電源這種非線性系統(tǒng)時(shí)動(dòng)態(tài)性能不佳,主要體現(xiàn)在負(fù)載變化或者有干擾的情況下,電源輸出超調(diào)大,調(diào)節(jié)時(shí)間長(zhǎng)等方面。模糊控制是應(yīng)用模糊集合理統(tǒng)籌考慮系統(tǒng)的一種控制方式,即使在不精確知道系統(tǒng)的數(shù)學(xué)模型的情況下也能夠?qū)ο到y(tǒng)進(jìn)行有效的控制[2],并且具有上升時(shí)間快,超調(diào)量小,魯棒性好等優(yōu)點(diǎn),特別適合于非線性和時(shí)變的控制對(duì)象。不足之處在于模糊控制的靜態(tài)誤差較大。結(jié)合PID控制和模糊控制兩者的優(yōu)點(diǎn)而對(duì)復(fù)雜對(duì)象進(jìn)行有效控制成為當(dāng)前的研究熱點(diǎn)。并且在溫度、倒立擺系統(tǒng)、電動(dòng)舵機(jī)驅(qū)動(dòng)系統(tǒng)得了階段性研究成果[3]。
1 模糊PID控制
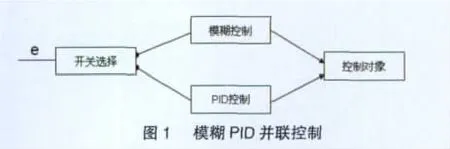
模糊控制和PID控制的結(jié)合控制方法,目前主要集中在兩個(gè)方向:一種是模糊PID并聯(lián)控制,如圖1所示,對(duì)誤差進(jìn)行實(shí)時(shí)跟蹤,誤差大時(shí)用模糊控制,以加快系統(tǒng)的反應(yīng)速度,減小超調(diào)量;誤差小時(shí)用PID控制以控制系統(tǒng)的靜態(tài)誤差。這種控制方式的困難之處在于控制量易于在控制閾值附近形成震蕩,達(dá)不到控制要求,有研究表明使用模糊閾值,并且通過(guò)遺傳算法對(duì)復(fù)合控制器的量化因子和積分系數(shù)進(jìn)行在線優(yōu)化,可以改善這種情況[4]。
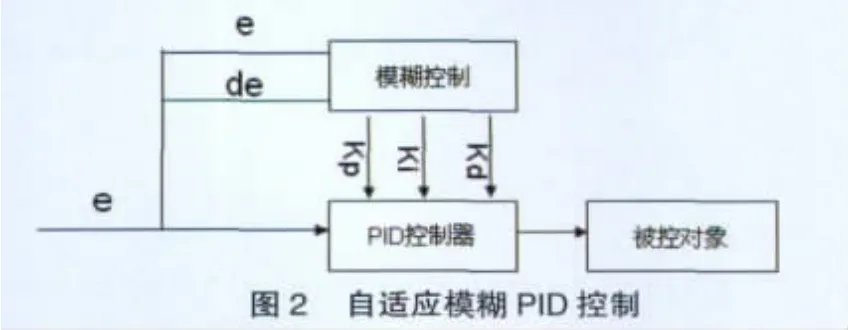
另一種結(jié)合方式是模糊自適應(yīng)PID控制,如圖2所示。這種方式也對(duì)系統(tǒng)誤差實(shí)時(shí)監(jiān)控,根據(jù)誤差和誤差的變化率在線動(dòng)態(tài)調(diào)節(jié)PID控制算法中比例、微分和積分的控制參數(shù),達(dá)到即減少系統(tǒng)超調(diào)、縮短穩(wěn)定時(shí)間,同時(shí)又不引進(jìn)大的穩(wěn)態(tài)誤差。本文所設(shè)計(jì)的模糊自適應(yīng)PID控制算法基于這種模型。
2 模糊自適應(yīng)PID算法的控制思想和設(shè)計(jì)總原則
2.1 模糊自適應(yīng)PID算法的控制思想
系統(tǒng)設(shè)計(jì)時(shí),根據(jù)Ziegler-Nichols整定方法,采用PID控制方法對(duì)系統(tǒng)進(jìn)行預(yù)控制,達(dá)到系統(tǒng)的穩(wěn)態(tài)要求,記下所整定的比例Kp、積分Ki和微分Kd參數(shù)。然后設(shè)計(jì)模糊控制,根據(jù)輸入變量的隸屬度函數(shù)和模糊規(guī)則表,運(yùn)用模糊推理的方法得出各參數(shù)的動(dòng)態(tài)值,用模糊控制的輸出在線調(diào)整PID參數(shù)。
2.2 模糊自適應(yīng)PID參數(shù)設(shè)計(jì)總原則[5]
(1)當(dāng)誤差較大時(shí),為加快系統(tǒng)的響應(yīng)速度,應(yīng)該取較大的Kp,這樣系統(tǒng)的時(shí)間常數(shù)和阻尼系數(shù)減小。當(dāng)然也不能過(guò)大而引起系統(tǒng)的不穩(wěn)定。為避免系統(tǒng)在開(kāi)始時(shí)可能引起的超范圍控制作用,取較小Kd,以便加快系統(tǒng)響應(yīng);同時(shí)為避免出現(xiàn)大的超調(diào),可以盡可能的減小Ki;(2)當(dāng)誤差處于中等大小時(shí),應(yīng)取較小的Kp,是系統(tǒng)響應(yīng)的超調(diào)略小,此時(shí)的Kd的取值對(duì)系統(tǒng)較為關(guān)鍵,應(yīng)取合適的值;此時(shí)可以增加一點(diǎn)Ki,但不要過(guò)大;(3)當(dāng)誤差較小時(shí),應(yīng)取較大的Kp和Ki,為避免系統(tǒng)在平衡點(diǎn)出現(xiàn)震蕩,Kd的取值應(yīng)適當(dāng)。
3 模糊自適應(yīng)PID算法的設(shè)計(jì)
3.1 輸入和輸出的模糊化
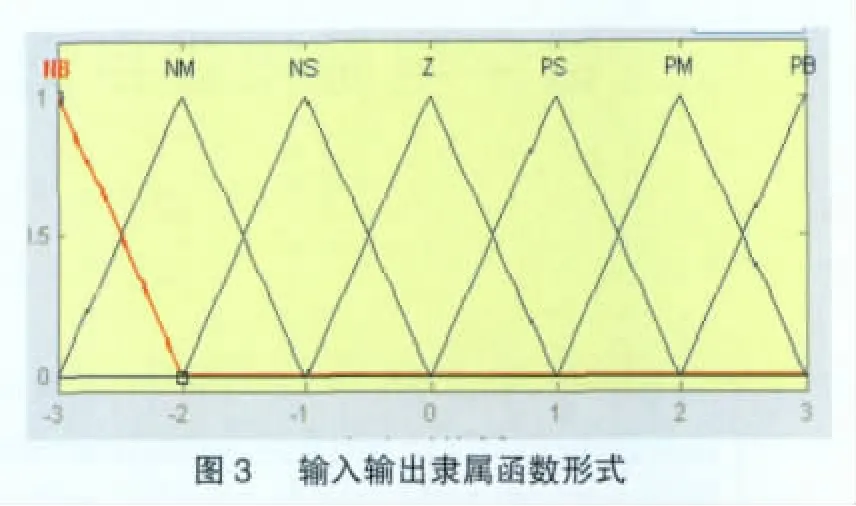
模糊自適應(yīng)PID的輸入為誤差E和誤差變化率DE,輸出為Kp,Ki和Kd。在本例中,各變量的模糊子集均為{NB,NM,NS,Z,PS,PM,PB},其表示的含義為負(fù)大,負(fù)中,負(fù)小,零,正小,正中、正大。誤差E的論域?yàn)閇-3 3],誤差變化率DE的論域?yàn)閇-1 1],輸出Kp的論域?yàn)閇0.4 1.6],Ki論域?yàn)閇0 400],Kd的論域?yàn)閇0 1],隸屬函數(shù)采用三角函數(shù),在論域上全交叉均勻分布[6]。其形式如圖3所示。
3.2 模糊規(guī)則表
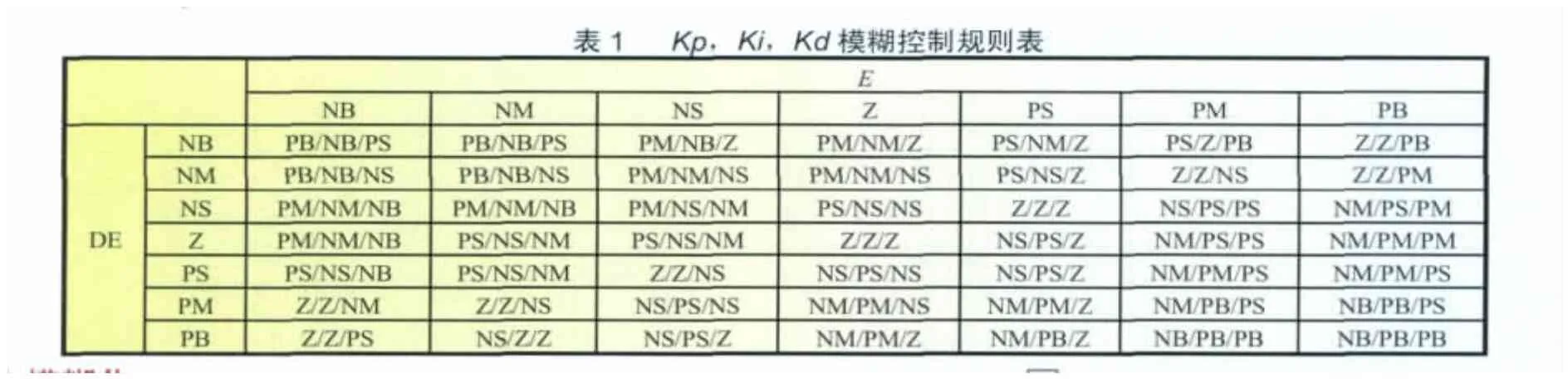
模糊規(guī)則表式根據(jù)PID三個(gè)參數(shù)Kp,Ki和Kd對(duì)系統(tǒng)的控制效果,結(jié)合理論以及實(shí)踐中的控制經(jīng)驗(yàn)而制成,采用模糊條件推理if A and B then C形式,稱為IF-THEN規(guī)則。該控制表是模糊控制器模糊判決的依據(jù),模糊控制的優(yōu)勢(shì)就體現(xiàn)在不僅能對(duì)系統(tǒng)輸入輸出隸屬函數(shù)進(jìn)行調(diào)節(jié),還可以根據(jù)具體的控制系統(tǒng)對(duì)模糊規(guī)則表進(jìn)行微調(diào)。本例中采用的模糊規(guī)則如表1所示。
?
3.3 去模糊化
依據(jù)模糊規(guī)則和模糊推理所得到的輸出是一個(gè)模糊量,而數(shù)字電源的控制必須是一個(gè)精確量,這就需要把模糊自適應(yīng)PID的輸出經(jīng)過(guò)去模糊化。常用的去模糊化方法有最大隸屬度法、面積中心(重心)法和面積平分法。本例中采用的是面積平分法。其計(jì)算形式如下[7]。

式中:ubis為輸出精確值,A(u)為隸屬函數(shù),(a,b)為隸屬函數(shù)的論域。
4 系統(tǒng)仿真研究
4.1 系統(tǒng)構(gòu)建
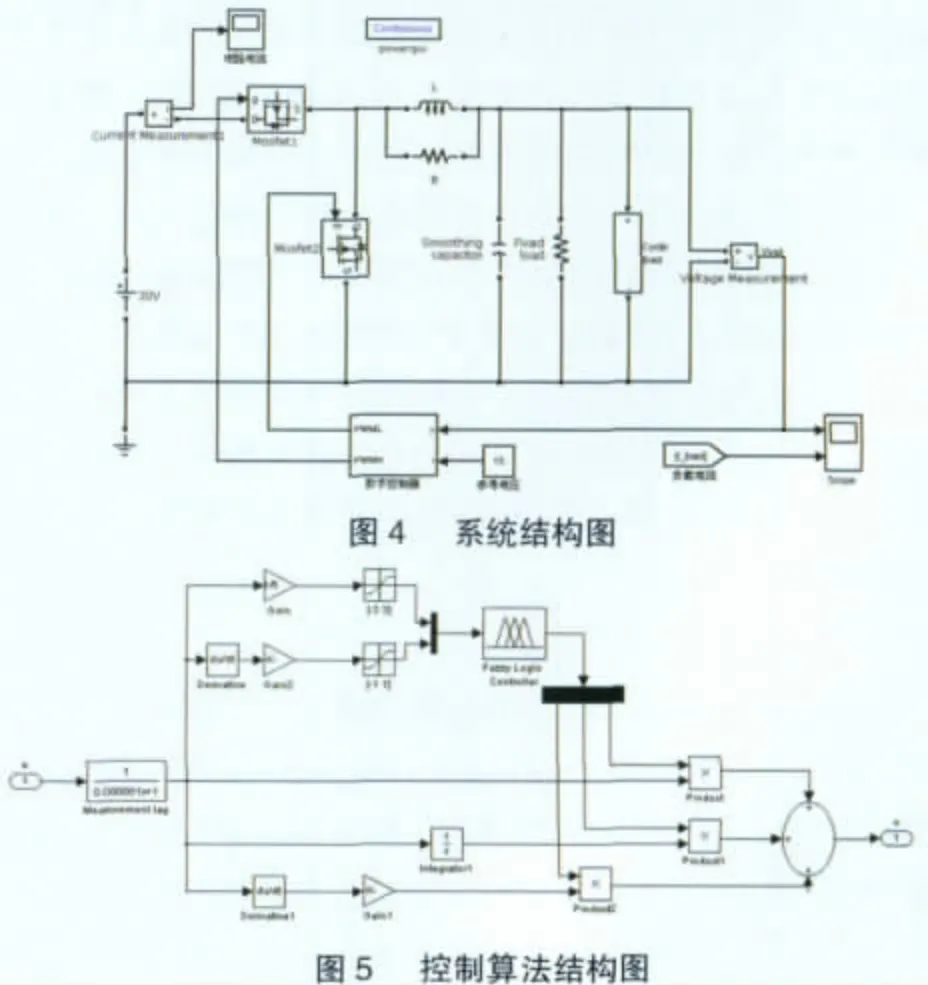
本文基于MATLAB/SIMULINK對(duì)自適應(yīng)模糊PID算法進(jìn)行了仿真研究。研究系統(tǒng)如圖4所示,系統(tǒng)采用經(jīng)典的DC/DC同步整流BUCK電路。輸入直流電壓為30 V,輸出參考電壓為15 V,圖中電感取值為1 mH,濾波電容為22μF負(fù)載電阻為3.75Ω,工作頻率為50 kHz。負(fù)載電流通過(guò)Cyclic load改變,其周期設(shè)為1/200,幅值為2 A。
數(shù)字控制器的設(shè)計(jì):數(shù)字控制器是該系統(tǒng)的核心組成部分,控制算法結(jié)構(gòu)如圖5所示,為了和實(shí)際情況更加接近,算法前面引入1μs的延遲環(huán)節(jié)代表測(cè)量延遲,誤差量化因子取為0.2,誤差變化率量化因子取為10-5,模糊控制模塊中的函數(shù)為上文所設(shè)計(jì)的模糊控制函數(shù)。控制器的通過(guò)調(diào)節(jié)輸出值u,調(diào)節(jié)PWM Generator模塊產(chǎn)生PWM波的占空比D來(lái)控制系統(tǒng)。
4.2 仿真結(jié)果
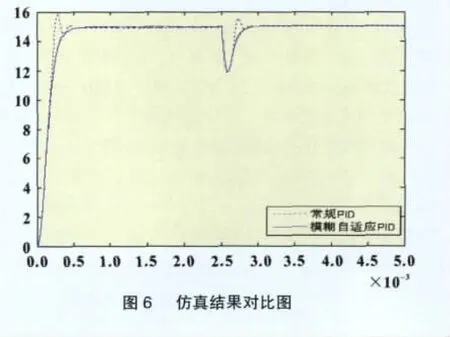
為了說(shuō)明模糊自適應(yīng)PID控制的控制效果,本文對(duì)比了常規(guī)PID算法和模糊自適應(yīng)PID算法。仿真結(jié)果如圖6所示,從圖6中可以看出模糊自適應(yīng)PID控制比數(shù)字PID控制算法穩(wěn)定速度快,超調(diào)量小。
[1]郇惠云.數(shù)字電源概述[J].中國(guó)西部科技,2009,8(16):31-32.
[2]WANG G C,ZHANG M,XU X H,et al.Optimization of controller parameters based on the improved genetic algorithms[C]//Proceedings of the 6th world congress on Control and Automation(WCICA 2006).Dalian:WCICA 2006,2006:3695-3698.
[3]李保強(qiáng),任天平,劉玲玲.模糊自適應(yīng)PID在葉臘石烤箱溫度控制中的應(yīng)用[J].機(jī)械設(shè)計(jì)與制造,2010,12(12):77-78.
[4]孟珺遐,王渝,王向周.Bang-Bang+Fuzzy-PI自適應(yīng)控制器的應(yīng)用研究[J].機(jī)床與液壓,2008,36(10):266-270.
[5]王貴成,汪勇,張占勝.自適應(yīng)模糊PID控制器的設(shè)計(jì)[J].儀器儀表學(xué)報(bào),2008,29(4):553-555.
[6]黃衛(wèi)華,方康玲,章政.典型模糊控制器的隸屬函數(shù)設(shè)計(jì)及分析[J].模糊系統(tǒng)與數(shù)學(xué),2010,24(5):83-89.
[7]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清華大學(xué)出版社,2008.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17