基于仿真軟件Simulink/SimMechanics的鉸接式列車動力學建模
2012-07-05 02:58:24李學良
城市軌道交通研究 2012年6期
李學良 沈 鋼
(同濟大學鐵道與城市軌道交通研究院,201804,上海∥第一作者,研究生)
在軌道交通車輛動力學領域中,基于仿真軟件Matlab/Simulink的仿真建模方法能夠幫助使用者對軌道車輛動力學理論進行清晰和深入的了解,故已被廣泛應用。該方法能對大部分的車輛進行準確的建模,可以建立輪對、轉向架、車體和懸掛系統的模型。但是軌道交通領域中也存在著一部分鉸接式列車,其主要特點是車輛之間采用鉸接式轉向架,即相鄰兩車共用一個轉向架。鉸接式列車具有減少轉向架數量,提高列車整體性和安全性等優點,因而也是進行動力學建模分析的對象。可是,如果用Simulink建立車輛動力學模型,在處理鉸接結構時會有一定的困難,無法直接描述。以往采取的方法大多是做等效處理,將鉸接單元等效成各個方向的剛度和阻尼。這樣雖然能夠近似描述鉸接結構的關系,但是,不能準確地表達出鉸對結構的約束作用。為了解決Simulink在這一問題上的局限性,現在引入Simulink里面的SimMechanics仿真工具箱來配合Simulink進行動力學仿真建模。SimMechanics是基于多剛體的思想,提供了描述剛體和各種運動副的模型單元,恰好適用于帶有鉸接結構的列車動力學仿真分析,能夠讓Simulink方法在列車動力學建模上的應用更加完善。
1 SimMechanics建模說明
SimMechanics是仿真軟件 Matlab/Simulink下新增加的一個工具箱,可以對各種以運動副相連接的剛體進行仿真。Simmechanics使用Simulink變步長積分法可以得到很高計算精度,Simulink的零點穿越檢測功能以雙精度數據水平判定和求解不連續過程。這對于機械系統中存在的靜摩擦和機械硬限位等情況的建模具有重要意義。其一切工作均在Simulink環境中完成,和Simulink可以完全對接、互相補足功能。SimMechanics模型還可與Simulink的控制系統模型方便地結合,在同一個環境中對控制器和受控對象建模。
SimMechanics主要由以下幾個模塊構成:Bodies,Constraints&Drivers,Force Elements,Interface Elements,Joints和 Sensors&Actuators等模塊。使用這些模塊可以方便地建立復雜機械系統的圖示化模型,進行機械系統的單獨分析或與任何Simulink設計的控制器及其它動態系統相連進行綜合仿真。本文的建模過程中主要使用了其中三個模塊:Bodies,Joints,Sensors&Actuators。
利用SimMechanics建模的主要思路如下:Bodies模塊只描述剛體的質量、慣量以及剛體與外界發生交互作用的點的位置,其本身沒有自由度;Joinst模塊描述各剛體之間以何種運動副相連接,以廣義約束的形式給定剛體的自由度,將各個剛體聯系起來;Sensor模塊輸出剛體上對應點的狀態,包括位移、速度、角速度等信息,Actuator模塊則可以向給定點輸入力和力矩,另外也可以將Sensor輸出的信息處理后再反饋回系統。Simulink和SimMechanics模塊之間的通信工作也是通過Sensors&Actuators模塊來完成。此外,SimMechanics也向用戶提供了參數化建模環境,用戶可以方便地修改系統中的物理參數,包括位置、方位角和機械元件運動參數等,可以將參數定義在Matlab軟件的m文件中并在仿真運算開始前執行該m文件即可。
除了Simulink似的常規建模方法外,SimMechanics還可以聯合CAD軟件進行更形象更快捷的建模。即將三維建模軟件SolidWorks建成的三維模型導入到SimMechanics中,生成動態仿真模型。可以將CAD模型保存成XML格式的文件,然后通過SimMechanics模型生成器生成SimMechanics模型。
2 鉸接式列車動力學模型
現以一輛土耳其鉸接式列車為例,說明用Simulink/SimMechanics進行動力學分析的有效性。研究對象為一列兩節編組的鉸接式列車(前端為A車,后端為B車)。
兩車輛端部各采用一臺傳統動車轉向架,相鄰車輛連接處采用拖車鉸接式轉向架。鉸接式車輛組結構模型如圖1所示。其一系懸掛為橡膠彈簧,二系懸掛為空氣彈簧結構。拖車鉸接式轉向架的空氣彈簧上面附加搖枕以設置鉸接裝置。鉸接裝置置于搖枕中部,通過能相互轉動的圓環盤實現。外圈圓盤與前端車體下部相固連,使前車體A能相對搖枕有搖頭的自由度。內圈圓盤通過其上面的左右兩個銷與后車體下部相固連,因而后車體能繞內圈圓盤轉動;且銷座內孔布置有橡膠襯套,具有一定彈性,因而后端車體B能夠相對搖枕有點頭、搖頭和側滾3個自由度。
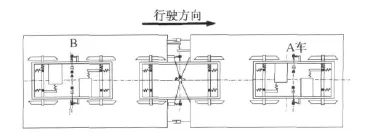
圖1 鉸接式車輛組結構模型圖
現階段SimMechanics提供的工具主要應用于剛體的動態模型建立,模型中對于構架、搖枕和車體這類剛體采用SimMechanics來建模,因而SimMechanics的主要功能是表達車體間相互鉸接的連接關系。其模型結構如圖2所示。
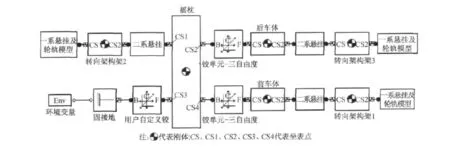
圖2 鉸接式列車模型結構
考慮到車輛的一系和二系懸掛系統都是同時在多個方向存在剛度和阻尼,但是SimMechanics中Force Elements的Spring&Damper現在還只能描述單一方向線性剛度和阻尼,因而對于實際的懸掛系統采用文獻[1]中描述的的方法來建立模型(如圖3所示)。此模型只要在SimMechanics模塊中分別返回懸掛上下連接點的狀態,就能反饋輸出懸掛力。
建立的模型考慮了車體橫向和豎向全部的自由度,因此最終建立的完整模型是非常龐大的。故有必要將各個模塊進行子系統封裝,然后相互連接成完整的程序。該程序能夠仿真車輛通過指定軌道的時域響應情況。其輸出結果包括各個點的位移、加速度、輪軌間的作用力、懸掛系統的作用力、車輛鉸接處的角位移等信息,可以用來了解車輛在軌道上的姿態,評價車輛的曲線通過能力,評價車輛舒適性,以及為限界計算提供輸入。
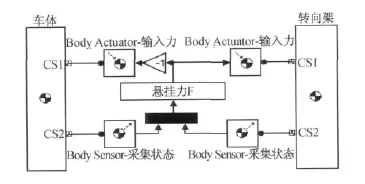
圖3 懸掛系統的模型
3 動力學分析結果
根據搭建的Simulink/SimMechanics模型,計算鉸接式列車的曲線通過響應。計算條件為:AW0(空載)工況,不考慮軌道隨機不平順,線路包括直線段、緩和曲線及圓曲線段,圓曲線半徑為300m,車輛速度為70km/h。根據搭建的仿真模型計算得到兩車體的橫向位移、搖頭角和側滾角如圖4~6所示。
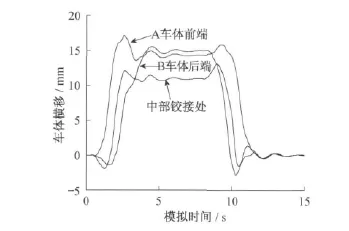
圖4 兩節車組前中后三點的車體橫向位移(A車在前)
從圖4~6的計算結果可以看出:車體的橫移、搖頭角和側滾角的變化趨勢,符合車輛從直線軌道到緩和曲線、再進入圓曲線、最后出緩和曲線的過程所應該表現出來的特征;側滾角準確反映了鉸接裝置對兩車之間的側滾自由度的限制。其他各個結果的數值和曲線變化趨勢也都與預期相接近,在此不一一詳列。根據計算結果可以判斷模型搭建的正確性,說明通過Simulink與SimMechanics相結合進行鉸接式列車的動力學時域響應仿真計算是可行的,該方法值得推廣應用。
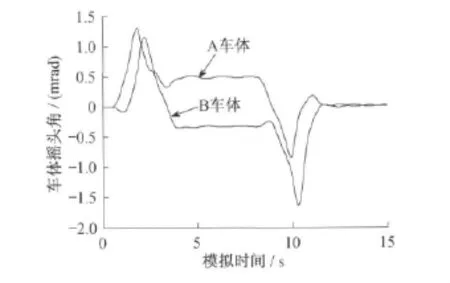
圖5 前后兩車體搖頭角位移
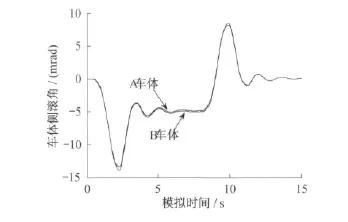
圖6 前后兩車體側滾角位移
4 結論
本文通過對鉸接式列車的曲線通過建模分析,介紹了一種新的動力學建模方法,即將Simulink與SimMechanics相結合的建模方法。從計算出的結果驗證了該建模方法能夠準確描述鉸接式列車的動力學特性,因而可以引入到軌道車輛的動力學仿真建模分析中。通過Simulink的平臺實現牛頓力學方法和多剛體方法的完美結合,豐富了建模手段,可方便地對車輛動力學性能進行研究。
[1]沈鋼.面向對象的機車車輛動力學仿真建模研究[J].鐵道學報,1998,20(4):50.
[2]羅雁云,譚大正,施董燕.基于剛柔結合建模技術的道岔區輪軌動力學仿真分析[J].城市軌道交通研究,2010(2):18.
[3]沈繼強,卜繼玲.鉸接式轉向架在城軌車輛中的應用研究[J].電力機車與城軌車輛,2007,30(6):11.
[4]吳覺士,仲梁維.基于MATIAB—SimMechanics的四缸內燃機曲柄連桿機構仿真和動力學分析[J].機械傳動,2007,31(1):34.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
裝備制造技術(2021年2期)2021-07-21 05:38:24
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
哈爾濱鐵道科技(2020年4期)2020-07-22 02:22:28
數學物理學報(2020年2期)2020-06-02 11:29:24
制造技術與機床(2019年12期)2020-01-06 03:17:46
西南交通大學學報(2018年5期)2018-11-08 10:58:26
光學精密工程(2016年6期)2016-11-07 09:07:19
現代工業經濟和信息化(2016年1期)2016-05-17 05:33:38
鐵道運營技術(2015年3期)2015-12-23 09:27:14