一種多功能家用升降平臺的設計與開發
2012-07-11 07:42:40馬遠揚李智祥
制造業自動化 2012年17期
馬遠揚,李智祥
(武漢理工大學 機電學院,武漢 430070)
0 引言
如今,各種實用的自動化機械紛紛進入現代生活家庭,極大的方便了人們的生活。隨著我國城鎮化改造的進行,城市人口的增加,土地的日益減少,生活空間變得越來越狹窄,而且由于人們的生活水平不斷提高,生活資料和家居越來越多,對存儲空間要求也越來越多。因此,家庭里的儲物柜正變得越來越高。在不久的將來,可能出現這樣一種情形,即家庭里的物品擺放變得像碼頭的集裝箱一樣井然有序,以便節省寶貴的空間。通過我們對大量家庭的采訪以及據此對未來生活作出的設想,我們大膽的得出這樣一個結論,物品的取放自動化將會是一種趨勢,能大大地提高人們生活的舒適度。
通過調查發現,目前的載重升降裝置大致有三大類:1)導鏈固定式升降機;2)曲臂式升降機;3)剪叉式液壓升降機。通過分析比較三種方式有些不足,主要表現在:功率大、體積大,不能適用于家庭。而集載重升降和自動取物功能于一體的裝置在市場上還是一個空缺。因此本論文設計和開發了一種多功能家用升降平臺,具有體積小、自動化程度高、便于收藏等特點。

圖1 平臺升起
1 多功能家用升降平臺的設計方案
1.1 主要功能

圖2 變為桌子
該升降平臺最大取物高度為220cm,自動放物時,將平臺升起至指定高度,利用可伸縮的傳送帶,可將物品傳輸至儲物柜指定位置。自動放物時,先利用機械臂將物品抬起,然后將可伸縮的傳送帶伸至物品底部,反向傳送,將物品取物。自動取物、放物過程均為遙控操作。平臺自動取物能承受的最大重量為25KG。為了避免閑置時占用額外空間,平臺在閑置時可將下方傘狀桌面升起,平臺便變形成為一張邊長100cm的方桌。
1.2 升降方案
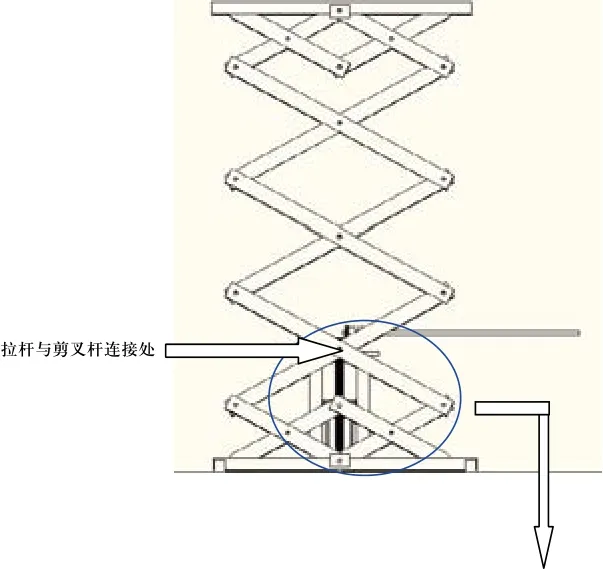
圖3 剪叉桿升降機構
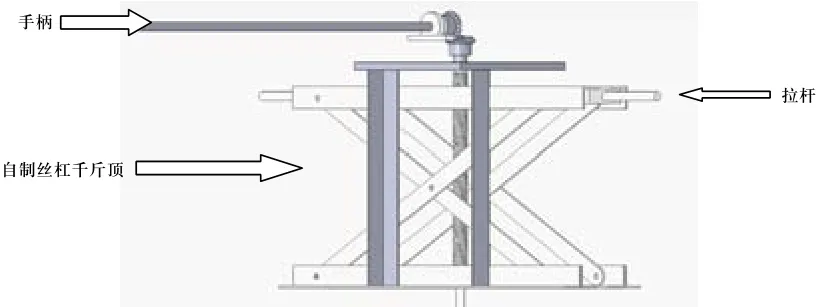
圖4 絲桿千斤頂
升降機構主要包括兩部分:絲杠千斤頂和剪叉桿升降機構。
絲杠千斤頂主要由一對傘齒機構和絲杠螺母副組成,拉桿中間與絲杠通過螺母連接,兩端與剪叉桿連接,搖動手柄,通過傘齒機構帶動絲杠轉動,在絲杠螺母副的作用下就可帶動拉桿上升和下降,這樣,拉桿就可帶動剪叉桿升降機構完成升降動作。
1.3 自動取放物品方案
自動取放物品的實現由傳送帶裝置和輔助機械臂完成。自動放物時,將平臺升起至指定高度,利用可伸縮的傳送帶,可將物品傳輸至儲物柜指定位置。自動放物時,先利用機械臂將物品抬起,然后將可伸縮的傳送帶伸至物品底部,反向傳送,將物品取物。
1.3.1 傳送帶裝置
自動取放物品功能的說明:
1)載物平臺上裝有兩個電機(圖5中1、2部分);
2)電機1通過齒輪傳動帶動傳送轉動,依靠帶面與物體間的摩擦力作用,傳送帶即可運送物體;
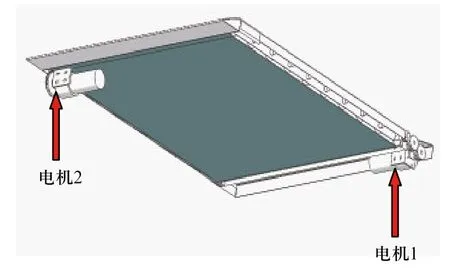
圖5 傳送帶部分
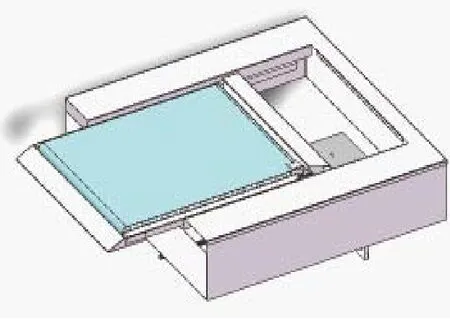
圖6 傳送帶伸出平臺
3)電機2通過齒輪與按裝在傳送帶外框的齒條嚙合,可使傳送帶整體向外伸出或收回如圖6所示。
4)通過電機1、電機2的配合運用,就可實現將物品放在儲物柜不同深度的功能。
1.3.2 輔助機械臂裝置
輔助機械臂安裝在齒條上,將輔助傳送帶取物。通過一個主動電機,借助兩個電磁離合器(圖8中1、2)實現多個動作的順序進行。具體動作順序如下:
1) 電動機通電。當離合器2通電時。原動機通過絲杠上的螺母轉動,在絲杠螺母副的作用下,螺母將沿著絲杠前后移動,從而使得與螺母固定在一起的機械臂整體前后移動。
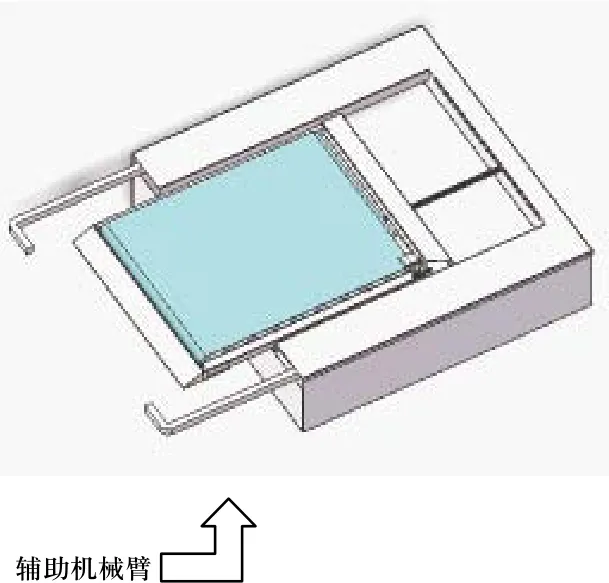
圖7 輔助機械臂
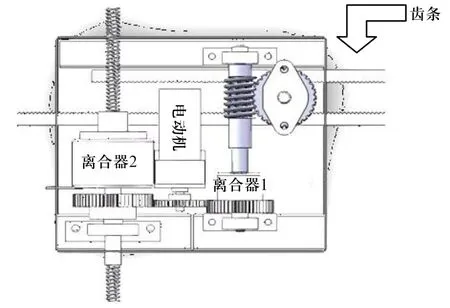
圖8 機械臂傳動
2)離合器2斷開,離合器1通電時。原動機帶動右側蝸輪蝸桿轉動,與渦輪同軸裝有一個齒輪,齒輪與兩條齒條嚙合,齒輪的正傳、反轉就對應著機械臂的夾緊與張開。
3)當夾緊過程完成后,機械臂下部電磁鐵通電,機械臂前部夾緊部位向上抬起。此時,傳送帶就可伸入物品下部將物品取上帶面。
1.4 傘狀桌面
當升降平臺閑置時,可利用傘狀機構將平臺四面的四塊桌面板同時升起,即可形成一張大的方桌使用。這樣,既不用占用家中的閑置空間又增加了產品的實用性。桌面的張開將借助于傘狀張合機構如圖10所示,就像雨傘一樣。當上方的滑塊向上滑動,與滑塊相連的連桿機構沿著滑軌上升,當連桿機構上升一定高度后,到達滑軌的死點位置,將四塊面板撐住;而要將桌面面板收起時,只用向下推動滑塊,將桿件推過死點位置,四塊面板即可降下。
2 多功能家用升降平臺的控制電路
該自動升降平臺采用單片機完成整個系統控制,詳細電路如圖11所示,多功能家用升降平臺主要由控制裝置——遙控及接收器0038、控制器——STC89C52、隔離器件——TLP521、電機驅動器——L298N、離合器驅動——繼電器等組成。
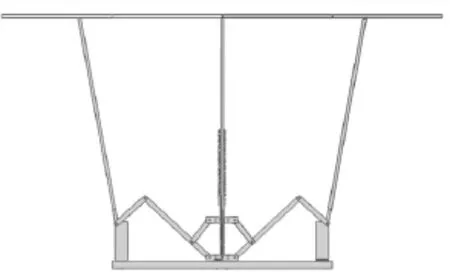
圖9 傘狀桌面展開
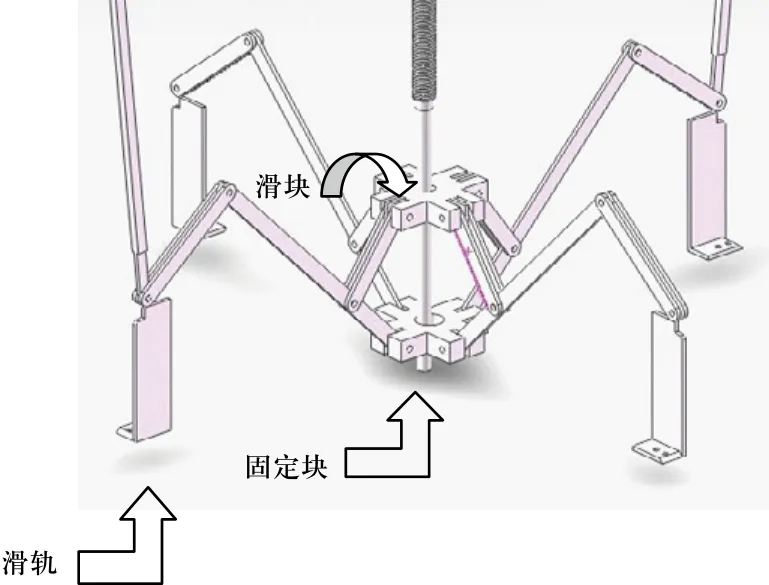
圖10 傘狀機構
其中,S1,S2,S3表示三個限位開關,S0為一個復位開關,P3.2口連接紅外接收器0038的一個引腳。
首先遙控通過按鍵發送控制信號,紅外接收器0038接受信號通過單片機的P3.2口中斷接受信號,單片機再通過解碼程序識別對應的按鍵,然后對每個對應的按鍵進行相應的操作。
控制系統硬件組成為:
單片機接收遙控器發出的命令后,根據接收的鍵盤命令可進行相應的操作。當L298N輸入端IN1、IN2端輸入“1,0”、 “0,1”且使能端EN為“1”時,電機可以正反轉,當使能為“0”或是輸入端為“0,0”、 “1,1”時電機停止轉動。通過對L298N輸入端與使能端發高低信號即可實現對電機的正反轉與停轉操作,從而可以實現通過遙控器對電機的正反停操作。離合器與電磁鐵的驅動由繼電器完成,單片機IO口通過8050三極管和光耦電路驅動繼電器,即能實現對24V離合器與電磁鐵的操作。
同時,在機械臂與載物臺端邊裝設光電開關,通過光電開關檢測機械臂及運載目標是否已經達到預定的位置,再將檢測到的信號發給單片機,最后通過單片機控制電機的運動狀態。這樣通過對電機正反轉及離合器、電磁鐵的控制,即實現了對機械臂的前近后退,橫向縱向運動控制。
3 多功能家用升降平臺的特點與不足
綜合目前現有產品的不足,經過多方面的改進與完善,本論文所設計的產品具有以下特點:
1) 采用單片機作為該家用產品的核心控制元件,自動化程度大大提高;
2) 通過傳送帶和輔助機械臂的巧妙設計,可實現了自動放物、取物的功能;
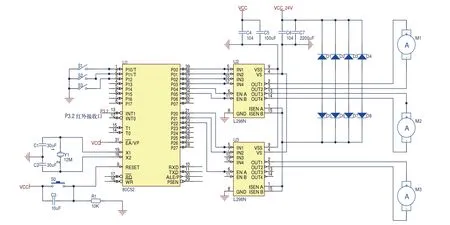
圖11 單片機自動控制系統
3) 多功能,放可作為升降機取放物體,收可作為桌子使用。
同時本論文所設計的產品由于絲桿千斤頂的作用點在第二層剪叉桿上,導致阻力臂較大,帶動千斤頂需要較大功率。如果剪叉桿降得過低,相連兩層剪叉桿之間的夾角太小,就會出現壓力角過大的問題。另外輔助機械臂抬起物品的作用力,是機械臂與物品之間的摩擦力,因此要求機械臂有足夠的強度能夠提供足夠的夾緊力,機械臂前端還要安裝摩擦片。
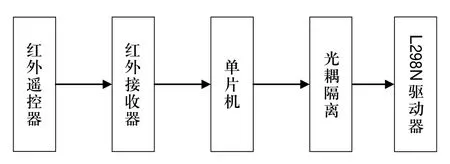
圖12 控制原理圖
[1] 濮良貴, 紀名剛. 機械設計[M]. 北京: 高等教育出版社.2006.
[2] 張占新. 材料力學[M]. 西安: 西北工業大學出版社.2005.
[3] 于永泗, 齊民. 機械工程材料[M]. 大連: 大連理工大學出版社. 2007.
[4] 機械設計手冊編委會. 機械設計手冊. 北京: 機械工業出版社. 2005.
[5] 大連理工大學工程圖學教研室. 機械制圖(第六版)[M].北京: 高等教育出版社. 2007.
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電子制作(2019年13期)2020-01-14 03:15:28
電腦報(2019年40期)2019-09-10 07:22:44
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
電子制作(2017年19期)2017-02-02 07:08:27
科技知識動漫(2016年8期)2016-07-29 20:40:09
