汽車制動防抱死系統控制策略的仿真研究
2012-07-11 07:42:42張紅英蔡進軍
制造業自動化 2012年18期
張紅英,蔡進軍
(1. 黃岡職業技術學院 交通學院,黃岡 438002;2. 武漢理工大學 汽車工程學院,武漢 430070)
0 引言
ABS系統即制動防抱死系統,是為了防止車輛在緊急制動時車輪抱死和喪失轉向能力的主動安全系統。相比普通制動系統,ABS有效改善了制動時的行車穩定性、操作性,充分發揮制動器效能,并減小輪胎磨損,制動安全性大為增加。
ABS系統的控制目標是選擇合適的控制策略,根據所選的控制變量(滑移率或者輪速),使車輛在制動時的滑移率在最佳值附近。目前ABS系統主要采用邏輯門限值控制、滑模變結構控制、PID控制、模糊控制等控制策略。
1 ABS系統的控制策略
1.1 邏輯門限值控制
邏輯門限值控制是確定一個期望滑移率,當系統檢測到的實時滑移率大于預先設定的參考值時制動系統降壓,其余時間增壓。通常根據經驗確定增壓與降壓的幅度,該控制策略的優點是不涉及具體的控制數學模型,被廣泛應用,缺點是互換性較差,需要做大量的實驗才能獲取到經驗參數,其控制邏輯較復雜,控制不夠平穩。
1.2 滑模變結構控制
滑模變結構控制是一種非線性的控制策略,其根據系統當時的狀態、偏差以及導數值,用理想開關的方式切換控制量的大小及符號,使系統在切換線鄰近區域來回運動。該控制策略依賴于車輛的數學模型,無法對多體動力學模型進行控制。
1.3 PID控制
PID控制策略是基于滑移率的控制,系統將實際滑移率控制在最佳滑移率點。這種系統從理論上講是最好的,但它實施難度大,特別是不易確定最佳滑移率點,而且基本上依靠試湊法來取控制參數,缺乏理論依據,所以進行這方面的理論研究及模擬工作比較多,不能被廣泛用于現有實際系統的控制。
1.4 模糊控制
模糊控制是一種基于經驗規則的、并列型的開關控制,可較好地適應動態變化工況非線性時變系統(車輛控制過程)。利用模糊邏輯控制的ABS在制動過程中,利用制動時車輛的運動特征與路面特性間的關系估計路面狀況,以確定不同路面的最佳滑移率,根據滑移率和滑移率誤差的變化量確定ABS制動壓力調節器的調節壓力。
2 制動防抱死系統的控制策略研究和仿真
2.1 基于邏輯門限值控制方法的仿真模型建立
通常用單論模型對車輛的運動狀態及受力情況進行分析,建立車輛的單輪模型可以大大簡化復雜的動力學模擬過程,易于描述制動過程。車輪在制動時的受力情況如圖1所示。
由上圖可建立單輪模型的動力學方程:
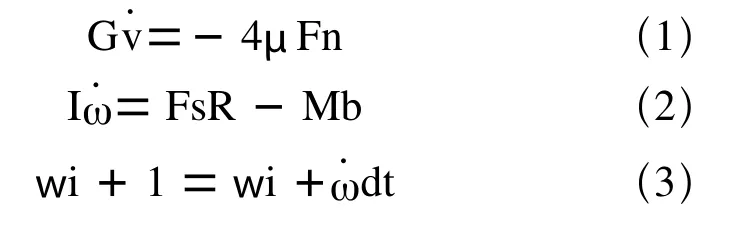

圖1 輪胎制動時的受力
方程式中的G是汽車質量,μ是附著系數,F是地面的支撐力,R是汽車輪胎半徑,M是汽車制動時的制動力矩,F是地面附著力,v是汽車速度,ω是輪胎角速度,I是車輪等效轉動慣量。
路面模型選擇干瀝青路面,附著系數與滑移率的關系為:

制動系統可簡化成一個一階慣性環節,在制動時系統進入壓力穩定階段后,可認為制動壓力與力矩成線性關系,比例因子為Kf。
在Simulink中搭建的ABS仿真模型如圖2所示。

圖2 基于邏輯門限值控制策略的仿真模型
模型中先設置期望滑移率,并在預先設置的一維查表模塊輸入干瀝青路面下滑移率和附著系數的關系,根據滑移率定義式和式(2)計算出相對滑移率,然后將計算值輸入到比較模塊,借助sign函數控制器,控制輪壓的增減,以達到反饋控制輪角速度的目的。
2.2 基于模糊控制方法的仿真模型建立
模糊控制方法的核心部分是模糊控制器的設計。模糊控制器在工作過程中首先將輸入量進行模糊化處理,然后進行模糊推理,再清晰化處理推理得出的模糊量,最終將清晰控制量輸出。對ABS仿真中,把理想滑移率和實際滑移率之差作為模糊控制器輸入量。模糊控制方法原理如圖3所示。

圖3 模糊控制方法原理圖
Simulink中有專為模糊控制策略仿真所定制的模糊控制箱工具,利用該工具可方便的對ABS模糊控制器進行設計。ABS的模糊控制系統對輸入量滑移率誤差E和滑移率誤差變化率Ec進行模糊化處理;輸出量為制動壓力變化量U。當設定的初始最佳滑移率為0.2時,則滑移率誤差的變化范圍為(-0.2,0.8),滑移率誤差的變化率Ec的變化范圍取為(-6,6),制動壓力變化量U的取值范圍為(-6,6)。分別設計輸入量滑移率誤差E、滑移率誤差變化率Ec和制動壓力變化量U的隸屬度函數如圖4所示,以使制動壓力變化量U對應快速減壓(NB),中速減壓(NM),慢速減壓(NS),保壓(ZE),慢速增壓(PM),中速增壓(PM),快速增壓(PB)7個狀態。設置時要保證論域的不對稱性。
設置完隸屬度函數后,需要編輯模糊規則,通過”If E is()and Ec is()then U is()”語句建立滑移率誤差及其微分輸入量和壓力變化輸出量的邏輯關系,以滿足ABS工作中壓力變化的7個狀態,建立好的49條規則如表1所示,并在模糊邏輯編輯器中輸入表中的邏輯關系。
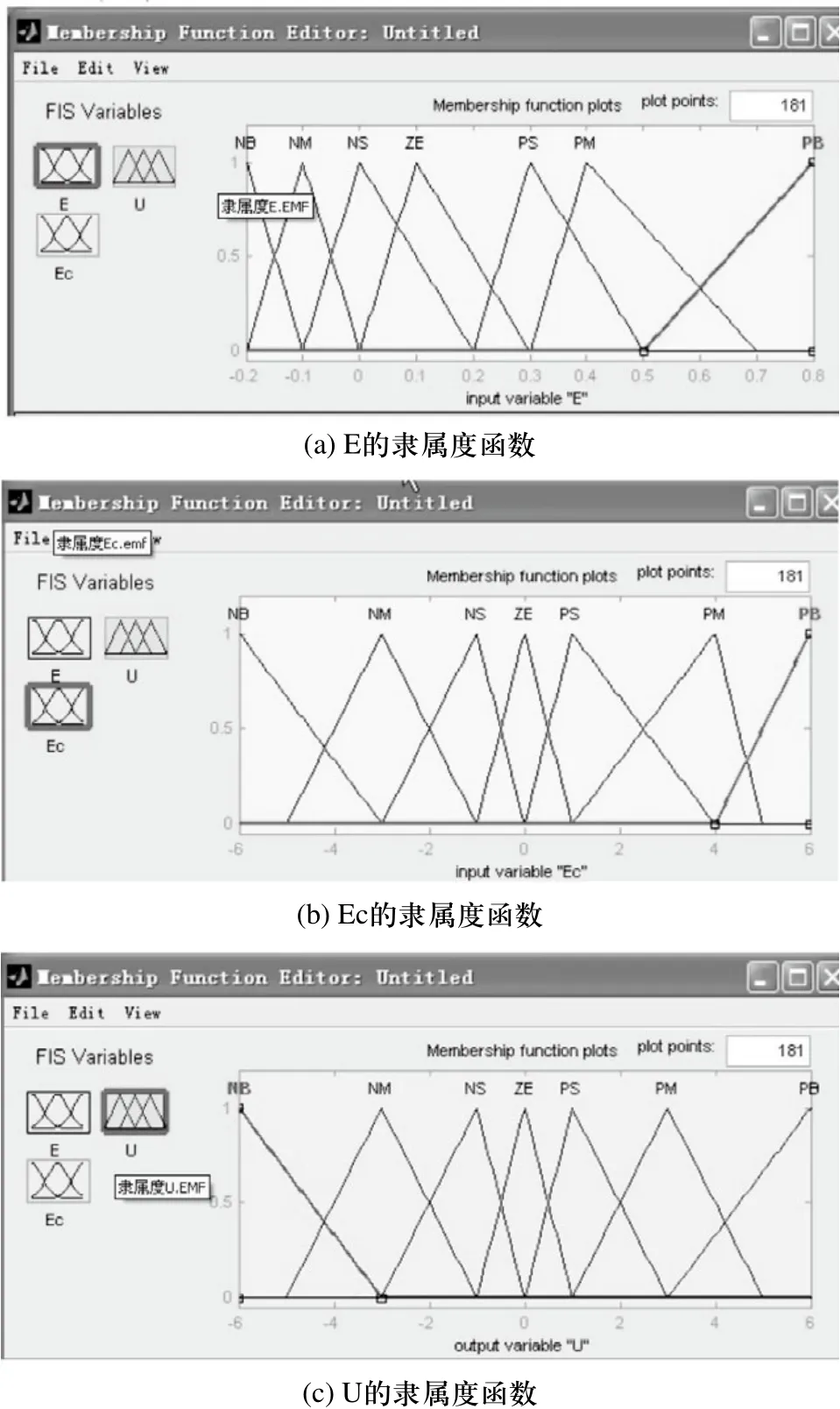
圖4 設置變量的隸屬度函數
輸出控制規則三維曲面如圖5所示。
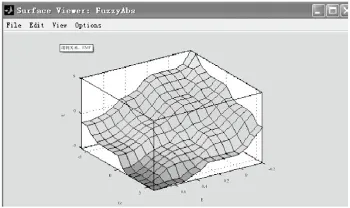
圖5 控制規則三維曲面
搭建的基于模糊控制策略的仿真模型如圖6所示。
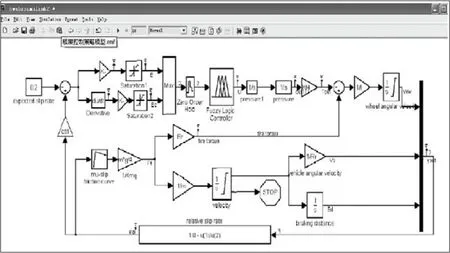
圖6 基于模糊控制控制策略的仿真模型
模型中,E和Ec的比例因子分別設置為1和0.4,以達到最快的仿真效果。和邏輯門仿真模型不同的是,因為模糊控制器輸出的是輪缸壓力變化速率的變化值,需經過兩次積分獲得輪缸壓力。模型中還采用零階保持器以加快仿真速率。
2.3 仿真結果分析
2.3.1 基于不同控制策略的ABS制動效果比較
由圖7中可以看出,無ABS的車輛,制動后不久就達到抱死狀態。而有ABS的車輛,無論用哪種控制策略,都沒有在車輛停止前抱死拖滑,驗證了ABS具有預防車輪抱死的效果。基于邏輯門限值控制策略的車輛滑移率在理想值0.2附近反復波動;而模糊控制策略仿真的滑移率曲線平緩接近0.2,這是因為模糊控制器中擬定的制動壓力變化規律受到滑移率誤差和其變化率的影響,不會出現很大的波動,仿真曲線和控制規律相一致。
由圖8所示,比較其制動距離曲線可以看出,有ABS的車輛制動距離較短,這是因為制動曲線在理想值附近,充分利用了路面附著力的緣故,所以裝載ABS的車輛制動性能也較好。上圖中還可以發現,采用邏輯門控制的ABS制動距離要比模糊控制的ABS制動距離更短,效果更好。
2.3.2 基于不同附著系數路面的ABS制動效果比較
將干瀝青路面模型換為疏松積雪路面。附著系數和滑移率的關系為:

在邏輯門控制下的ABS制動效果曲線比較如圖9和圖10所示。
由仿真結果可知,因為疏松積雪路面的附著力比干瀝青路面低,因此更容易打滑,滑移率曲線的波動較大,制動距離較長,所以即使安裝了ABS的車輛,在冰面、雪地等低附著路面行駛時,駕駛員需要注意行車安全,低速行駛。
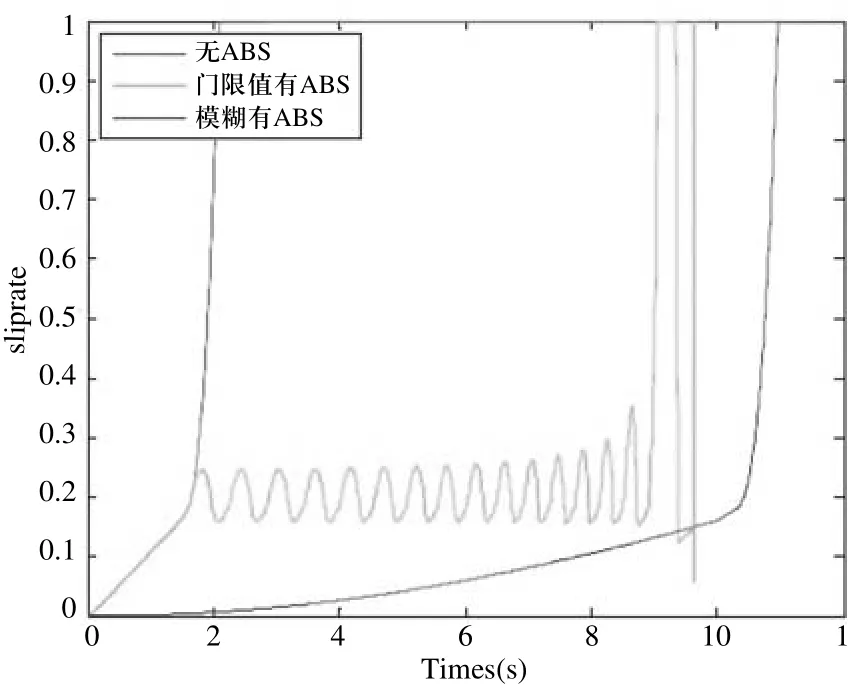
圖7 兩種控制策略下的滑移率比較

圖8 兩種控制策略下的制動距離比較
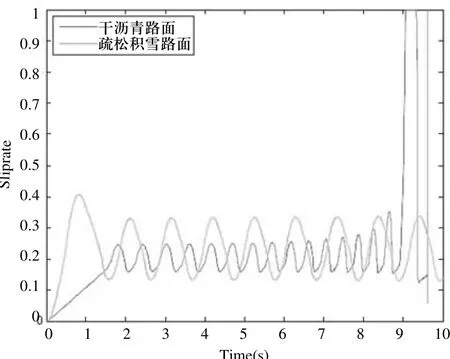
圖9 干瀝青路面和疏松積雪路面滑移率比較
3 結論
ABS是提高汽車主動安全性能的重要裝置,雖然ABS有極其成熟的市場,但份額基本被國外公司壟斷,國內對于ABS的研究還處在起步階段,在ABS的結構和控制策略的設計上還需不斷的深入。本文主要介紹了目前應用于ABS的不同的控制策略,分析了ABS制動過程中的動力學模型,使用Matlab中的Simulink模塊分別對基于邏輯門限值控制策略和模糊控制策略的ABS進行了建模仿真,從滑移率和制動距離入手討論了不同控制策略對車輛制動性能的影響,以及不同路面下ABS性能的差異。從而得到了ABS系統的工作規律,為深入開展汽車ABS的研究提供了有價值的參考和指導意義。
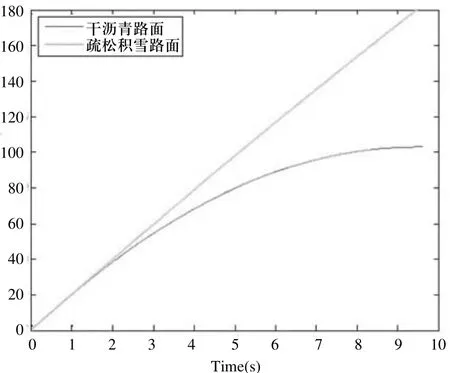
圖10 干瀝青路面和疏松積雪路面制動距離比較
[1] 麻友良. 汽車電器與電子控制系統(第2版)[M]. 北京: 機械工業出版社, 2011.
[2] 高玉民, 王正潤. ABS防抱制動系統[M]. 福建: 福建科學技術出版社, 2001.
[3] 魏朗, 王囤編. 現代汽車制動防抱死系統實用技術[M].北京: 人民交通出版社, 2001.
[4] 黎軍主. 汽車制動電子控制系統檢測與維修[M]. 北京:人民交通出版社, 2004.
[5] 李開春. 基于車輪滑移率的ABS控制算法研究[D]. 江蘇大學, 2006.
[6] James D. Halderman, Chaes D. Mitchell, Jr. Automotive brake systems [M]. New Jersey: Pearson Prentice Hal, 2004.
[7] 余志生. 汽車理論[M]. 北京: 機械工業出版社, 2009.
[8] 藺玉輝. ABS模擬仿真與模糊控制設計[D]. 東北大學,2005.
[9] 于東. 制動防抱死系統(ABS)控制方法仿真研究與控制器設計[D]. 山東大學, 2007.
[10] 侯光鈕. 車輛防抱死制動系統的控制技術研究[D]. 東南大學, 2005.
[11] Sun Jun. Development of Fuzzy logic Anti-Lock Braking System for Light Bus. SAE paper No. 2003-01-0458.
[12] A Simulation of Vehicle Lateral Stability Based on Fuzzy PID Control[C]. 2009 International Conference on Measuring Technology and Mechatronics Automation. 2009: 194-199.
[13] 茍凱英, 等. 基于MATLAB仿真環境實現防抱制動控制邏輯[J]. 測控技術, 2002, 21(1): 25-27.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
