基于激光掃描技術的鐵路限界檢測系統
2012-07-13 08:53:58劉維楨孫淑杰
鐵路技術創新 2012年1期
■ 劉維楨 孫淑杰
鐵路限界包括機車車輛限界和建筑接近限界,均需符合GB 146.l—1983和GB 146.2—1983的規定。建筑接近限界是一個以鋼軌頂面為基準,在水平直線上垂直于鐵路中心線、接近機車車輛限界的特定尺寸橫斷面輪廓。在此輪廓內,除了機車車輛和與機車車輛有相互作用的建筑物和設備(站臺、車輛減速器、路簽接受器、接觸網等)外,其他建筑物和設備不得侵入。
鐵路的發展使線路和設施不斷的改進與更新,很多高站臺的改造、修建,隧道的整修等都出現了不符合標準軌距鐵路限界規范的施工情況,極大影響行車安全,尤其是客貨混運的線路矛盾更為突出。為實現在運輸繁忙干線上不中斷行車的條件下完成鐵路限界檢測,確保列車有足夠的行駛空間和行駛安全,需對鐵路線路進行準確、快速檢測,及時排查安全隱患,迫切需要一種能夠快速、連續、準確測量鐵路橋梁、隧道、站臺、雨棚、建筑物等限界情況的動態檢測設備,以滿足快速發展的軌道交通安全運輸需要。鐵路限界檢測系統應運而生。
1 鐵路限界檢測系統設計
1.1 限界檢測方法
目前,建筑物接近限界的檢測方法有:橫斷面法、綜合斷面法、軌跡法、斷面攝像法、激光掃描法等。
橫斷面法需停車測量,是一種定位測量斷面法,即先選定施測橫斷面位置,逐個測出橋隧的凈空輪廓,然后綜合全橋或全隧道各橫斷面的最小內輪廓點(包括附屬設備突出點),構成綜合最小限界的方法。通常采用凈空檢查尺或凈空檢查架來實施。凈空檢查尺可直接測量得到各點縱橫坐標值,測量結果的整理比較簡單,但工作效率低,只適用個別斷面的測量,靠近隧道拱頂處的寬度不便檢查,因此精度不高。
綜合斷面法是一種定高測寬法,可以車動測量,直接測出距軌面不同高度處的左右側寬高。通常采用開屏式限界檢查車和橋隧凈空檢查車。開屏式限界檢查車系統在平車上組立檢查架,檢查架外圍裝設測量觸手,觸手位置和方向固定,一般按橫斷面法中的測點要求布置,觸手量測斷面受阻時可自動偏轉通過,但不會自動復位,用軌道車或機車牽引通過橋隧時即可得到各觸手的讀數。
軌跡法的特點是定向連續測距,動車量測,通過測繪觸手外端點的運動軌跡可以得到:當觸手位于車體豎軸上端并與之夾角為0°時,直接得到隧道凈空的變化線;當觸手位于距軌面不同高度,而與車體豎軸垂直時,直接得出不同高度處左、右側凈寬的變化線;當觸手位于軌距面不同高度,而與車體豎軸夾角為0°~90°時,通過換算可得出不同高度處凈寬的變化線。
斷面攝像法通常由線型激光投射到被測建筑物上,從而得到建筑物斷面輪廓線,檢查車上裝有固定攝像機,并對該輪廓的光帶進行拍攝,經過圖像處理后,判讀換算出建筑物的實際位置尺寸。該方法操作簡便,使用安全,運用范圍廣,可與客、貨車連掛,對運輸干擾少,檢測精度較高,大范圍的限界檢測多采用此法。但對于隧道外建筑限界檢測易受陽光干擾,系統可靠性較低。
激光掃描法主要是以目前比較流行的激光測量系統為基礎,通過一臺或多臺激光掃描設備連續不斷地測量周圍建筑物的距離信息,形成建筑物限界剖面圖。它是伴隨激光測距技術發展而形成的一種新興的限界測量方法,具有快速、實時、準確、可靠的特點,同時設備受外界陽光干擾少,能夠在復雜環境下使用。
以上幾種檢測方法中,除斷面攝像法和激光掃描法外,其他多為人工操作,在對站臺、房屋、雨棚等建筑物和設備進行檢測時還靠原始手工檢測,效率低、工作量大、可靠性差、準確性不高。基于斷面攝像法的自動化程度較高的隧道限界檢測車也僅能對隧道進行檢測,對隧道外的回流線、通信線路和電力線無法檢測,并受光的干擾較大。因此,確定激光掃描法為限界測量的基本方法。
1.2 測量坐標系統
依據國家標準,檢測車輛橫向振動偏移量應以雙軌所在平面為基準,在曲線路段外軌超高和線路坡度將會導致基準面與當地水平面不重合,為了以雙軌所在平面為基準完成車輛限界和建筑限界的檢測,涉及到的坐標系有軌面基準坐標系、車輛坐標系和激光掃描坐標系(見圖1)。
軌面基準坐標系:O-XYZ,O為軌距中心點,OXZ與鋼軌基準面重合,OX軸指向列車前進方向,OY軸垂直于鋼軌基準面向上。直線運行時鋼軌基準面與當地水平面重合,車輛通過曲線路段或坡度路段時由于外軌超高和坡度影響鋼軌基準面偏離大地水平面。
車輛坐標系:o-xyz與車廂固連,具有彈簧懸掛裝置的鐵路車輛是一個多自由度的振動系統,這時車輛坐標系o-xyz相對于軌面坐標系O-XYZ會有相對運動。車輛相對于軌面的運動可用車輛坐標系o-xyz相對于軌面基準坐標系O-XYZ的運動來描述,可以分解為沿3個坐標軸的平移運動和繞3個坐標軸的旋轉運動。
激光掃描坐標系R(θ):主要指激光掃描傳感器所在的測量坐標系,屬于極坐標系,按照激光測距原理每隔一定角度θ測量徑矢R,安裝于車輛上,用于測量建筑物接近位置,其相對車輛坐標系o-xyz作勻速旋轉掃描運動。
三大坐標系相輔相成,共同組成鐵路限界測量坐標系統,檢測車在運動過程中,會產生不同方向的振動與偏移,所以三大坐標系是動態變化的,相互間的關系也是動態的。為此需要將車輛坐標系和激光掃描坐標系映射到軌面基準坐標系上,將三大坐標系化為統一,同時設計有效的坐標修正算法,針對不同環境特征,通過對采集距離信息進行有效分析與處理,實現坐標系的快速變換與映射。
1.3 系統結構
鐵路限界檢測系統主要由激光掃描傳感器、設備采集箱、限界處理服務器等組成(見圖2)。設備采集箱密封防水,封裝有數據處理、傳輸與供電裝置,用于設備供電和數據采集、處理與傳輸;激光掃描傳感器安裝于專門設計的傳感器固定板和固定件上,并封裝于設備采集箱上,形成一體化系統,通過機械結構與車體固定,能夠保證快裝快卸,節約人力物力;傳感器掃描區域應無遮擋,位于同一個垂直斷面上,保證準確測量整個限界檢測斷面;限界處理服務器安裝于車體機柜里,與設備采集箱通過網線連接,內部安裝有數據采集與分析軟件,能夠實時采集、處理與存儲數據,以二維和三維圖形方式展示,并能以全息圖的方式形象展示,同時能夠進行數據分析、侵限處理及相關報表的生成與處理等。
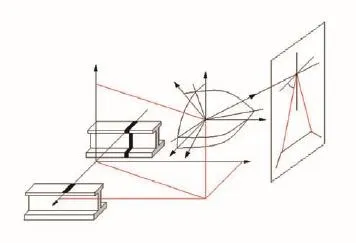
圖1 軌面基準坐標系、車輛坐標系與激光掃描坐標系

圖2 系統結構

2 實測驗證
2.1 實驗室模擬測試平臺
在實驗室環境里,設計高強度承重框架,通過承重彈簧懸掛鐵路限界檢測系統,搭建具備6個自由度的模擬測試平臺,模擬車載剛體運行環境,進行相關理論算法研究和軟件開發工作。
2.2 現場應用及試驗
鐵路限界檢測系統加載于檢測車上進行動態試驗,現場試驗數據實際侵限截圖見圖3,隧道三維全息圖見圖4,空曠地帶三維全息圖見圖5,緩坡三維全息圖見圖6,站臺雨棚三維全息圖見圖7。
經過現場動態試驗與試運行,鐵路限界檢測系統機械安裝簡捷快速,方便現場操作,固定牢靠,并且帶有防護鎖鏈,滿足安全防護要求,檢測系統設備運行穩定,軟件界面友好,能夠實時準確檢測全斷面數據,并能夠對數據進行全息圖展示、侵限與數據分析,并生成相關數據報表,完全達到限界檢測的要求。
目前研制的鐵路限界檢測系統已經在呼和浩特鐵路局軌檢車使用一年多時間,累積實際檢測里程已達2.3萬 km,受到用戶的好評。
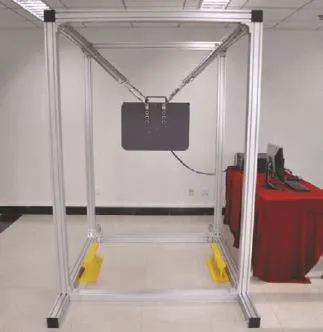

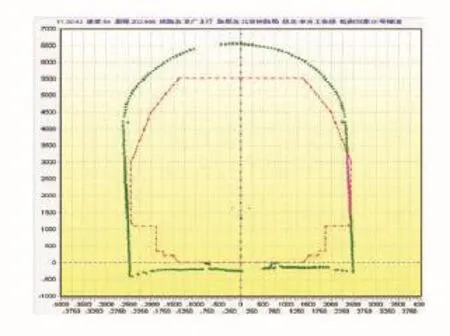
圖3 典型侵限圖
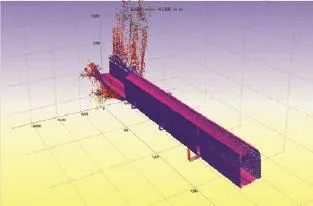
圖4 隧道三維全息圖
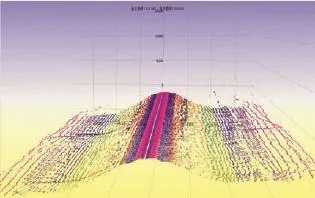
圖5 空曠地帶三維全息圖
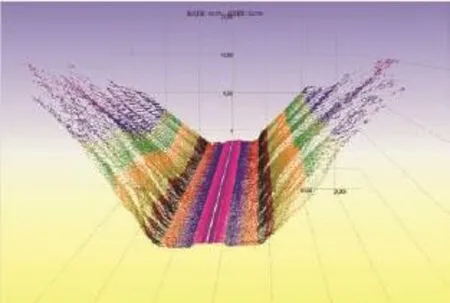
圖6 緩坡三維全息圖
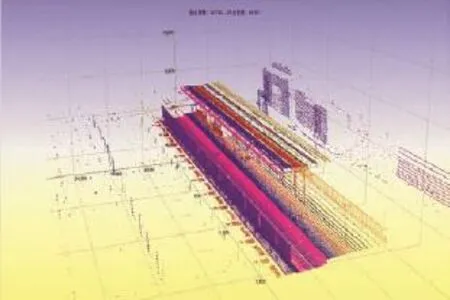
圖7 站臺雨棚三維全息圖
3 結束語
鐵路限界檢測系統實現了在繁忙運輸干線上不中斷行車條件下準確快速地完成限界檢測,及時排查安全隱患,避免危害行車安全的情況出現。在高速鐵路及城市軌道交通快速發展的今天,鐵路限界檢測系統的研制成功必將在檢測線路周邊建筑物限界、保證行車安全方面發揮更大作用。
[1]中華人民共和國國家標準局. GB 146.1—1983 標準軌距鐵路機車車輛限界[S],1983
[2]中華人民共和國國家標準局. GB 146.2—1983 標準軌距鐵路建筑限界[S],1983
[3]中華人民共和國鐵道部. 鐵路技術管理規程[M],北京:中國鐵道出版社,2006
[4]JJG(鐵道)1997—2008 鐵路隧道限界檢測裝置檢定規程[S]
[5]鐵運函[2001]277號 關于加強限界管理全面檢測鐵路建筑接近限界的通知
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
云南畫報(2021年12期)2021-03-08 00:50:54
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
鐵道通信信號(2018年7期)2018-08-29 01:17:04
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
通信電源技術(2016年4期)2016-04-04 02:58:04
