CTCS-3級列控仿真系統ATP接口平臺實時性研究與實現
2012-07-13 08:24:24車惠軍謝俊紅
鐵路通信信號工程技術 2012年6期
侯 磊 車惠軍 張 波 謝俊紅
(北京全路通信信號研究設計院有限公司,北京 100073)
1 概述
ATP接口平臺是CTCS-3級列控仿真系統的一個重要組成部分。通過ATP接口平臺,真實車載ATP實物設備被接入仿真系統,形成半實物仿真,實現在仿真系統環境下,與仿真模型、仿真環境之間的協同運行工作。ATP接口平臺一方面將仿真系統模擬的邏輯激勵轉變為與ATP實物接口完全一致的物理信號,施加于ATP實物;另一方面采集實物信號輸出,上傳仿真系統。因此,為了實時模擬運行控制,滿足ATP實物測試和驗證的需求,要求ATP接口平臺具備較高的實時性,能夠及時傳遞仿真系統與ATP系統之間的信號。本文將介紹在CTCS-3級列控仿真系統ATP接口平臺的設計過程中對實時性的研究與實現方法。
2 ATP接口平臺實時性需求分析
2.1 ATP接口平臺方案
在半實物仿真系統中,實物接入的原則:保證所有的數據實現閉環。如果物理閉環無法實現,就將此環節的輸入輸出接入實物接口平臺,而將該環節在仿真平臺上以虛擬模型的形式存在。
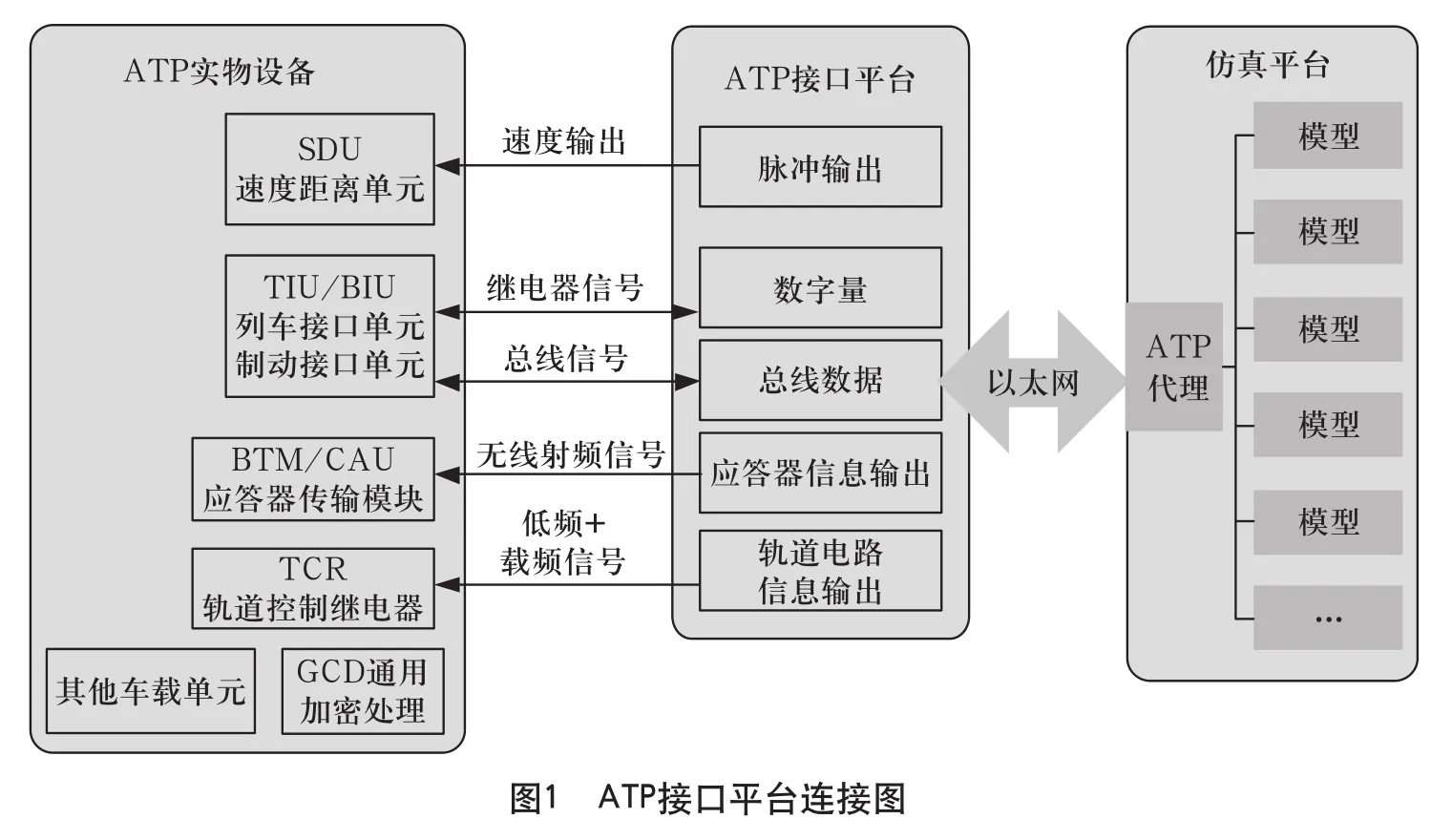
圖1是ATP實物通過ATP接口平臺接入仿真系統的連接圖。ATP接口平臺通過以太網接口與仿真平臺連接,建立仿真平臺與ATP實物設備之間虛擬通道。在CTCS-3級列控仿真系統中,針對龐巴迪ATP, ATP接口平臺使用I/O輸入輸出接口(DI、DO)連接ATP的列車接口單元(TIU)和制動接口單元(BIU);使用脈沖輸出接口(PO)連接測速測距單元(SDU);使用RS-232接口驅動軌旁電子單元(LEU),實時寫入有源應答器,模擬軌道上不同的無源應答器和有源應答器,通過CAU連接ATP的點式信息接收模塊(BTM),或使用RS-232接口實時驅動CAU模擬器(CAUSim),模擬CAU信號,通過BTM,連接ATP的BTM;使用CAN總線接口驅動軌道電路發碼盒ZPW-2000A,引出模擬載頻信號,連接ATP的連續信息接收模塊(STM)。
ATP接口平臺硬件以PowerPC微處理器和FPGA為核心,使用微處理器自帶通信接口,或通過總線外擴,實現各種所需對外接口,包括以太網接口、I/O接口、PO接口、RS-232接口、CAN總線接口等。
ATP接口平臺接入仿真系統的功能流程如圖2所示,ATP接口平臺與仿真平臺通過特定協議通信,傳遞仿真系統與ATP實物雙向的所有信號數據,除了處理通信協議外,接口平臺還提供一些管理機制,滿足ATP實物接入的一些特殊需求,如系統監控、故障注入、實時性管理等。

2.2 仿真延時分析和實時性需求
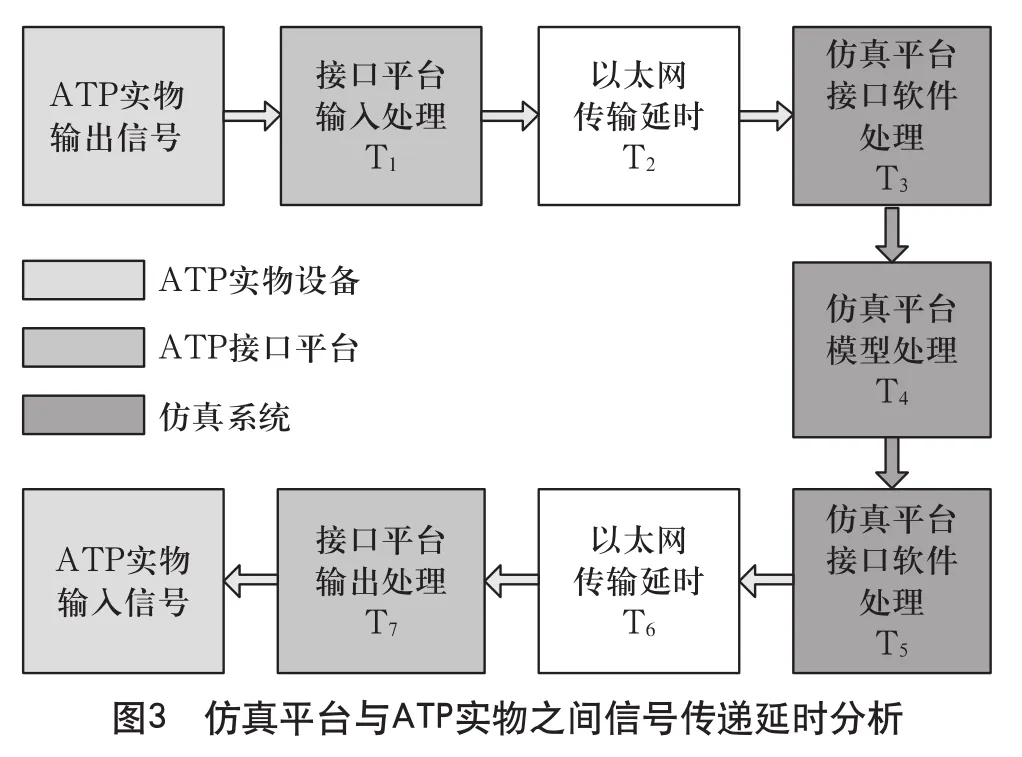
仿真平臺通過ATP接口平臺間接控制ATP實物,但是接口平臺的引入也必將增加兩者信號傳遞的延時,降低仿真系統的實時性。如圖3所示為仿真平臺通過接口平臺,與ATP實物進行信號傳遞的延時分析圖。由圖3可得,當仿真系統接收ATP實物輸出信號時,信號傳遞經歷4段延時:首先,接口平臺探測到ATP輸出信號,要經過延時T1,完成信號采集、分析、協議包裝的過程后,才能通過以太網發送給仿真平臺;其次,數據在以太網中的發送、路由和接收過程中會引入延時T2;當數據被仿真平臺通信處理軟件接收后,需要經歷協議解析、分析和反饋的過程,引入延時T3;最終數據被送到仿真平臺的模型,模型處理過程中仍存在延時T4。當仿真系統向ATP實物輸出信號時,同樣會經歷類似的4段延時,在此不一一闡述。
為了充分真實地模擬現場場景,滿足實物測試和驗證的需求,要求盡量減少仿真系統中各段延時。在實際設計中,以太網通信通過交換機和路由配置,優化網絡拓撲,減少以太網傳輸過程中的延時;仿真平臺模型和通信軟件設計中,通過使用更高性能服務器和優化軟件架構的方法減少延時。接口平臺是仿真系統的重要一環,為了減少接口平臺帶來的延時,要求接口平臺具備較高實時性,此外,還需要針對有特別需求的信號傳遞,進行特別處理。
ATP接口平臺針對ATP的TIU單元、BIU單元、SDU單元和STM單元的數據輸入或輸出,均是簡單的信號傳遞,通過提高接口平臺的實時性,可以減小這些信號傳遞過程中的延時,優化仿真效果。而對于BTM接口的應答器報文傳遞,除了提高接口平臺的實時性,還需要采用特定機制,精確應答器報文傳遞的時機。
3 平臺實時性設計
3.1 平臺內部延時分析
ATP接口平臺傳遞信號時引入的延時,可以進一步細化,如圖4所示。信號從仿真平臺向ATP實物傳遞或反向傳遞產生的延時,均可在接口平臺內部細化為4段。以仿真平臺向ATP實物傳遞信號為例,以太網接口接收數據的過程包括網卡芯片接收物理信號、以太網接收中斷響應和微處理器讀取網卡芯片數據,存在延時t1;以太網數據等待任務進程處理,存在任務切換延時t2;任務進程對以太網數據進行解包、分析和反饋,產生延時t3;最后數據通過特定接口輸出至ATP實物接口,也需要延時t4。

以太網數據收發時產生的延時t1和t8由以太網波特率和微處理器處理能力決定,ATP接口平臺與交換機之間使用100 Mbit/s以太網,因此延時主要由微處理器處理能力決定;任務處理延時t3和t7由待處理的任務量和微處理器處理能力確定,在待處理任務確定的情況下,延時主要由微處理器處理能力決定;ATP接口輸入輸出產生的延時t4和t5主要由接口類型決定,接口平臺驅動的接口都已確定,延時t4和t5固定;任務切換延時t3和t7主要由接口平臺所選用的操作系統決定,不同操作系統的任務切換延時差別很大。
ATP接口平臺以Freescale公司PowerPC微處理器MPC5200B為核心,MPC5200B的處理能力可達885 MIPS(百萬條指令/秒),而且擁有豐富外設接口,用于ATP接口平臺設計,功能足夠強大。根據上述分析,當選定平臺核心處理器,確定工作任務之后,ATP接口平臺內部延時主要由選用的操作系統決定,為了減小接口平臺在整個仿真系統中帶來的延時,需要選擇合適的實時操作系統,以提高平臺的實時性能。
3.2 操作系統選擇
目前主流的實時操作系統主要包括uC/OS,eCOS,Vxworks,以及實時Linux(包括RTlinux、Xenomai等 )。
uC/OS和eCOS是內核相對簡潔的實時操作系統,任務調度機制相對于Vxworks和實時Linux較為簡單,可以提供很好的實時性。但是uC/OS和eCOS對TCP/IP協議棧、文件系統的支持不夠完備,往往需要第三方代碼的支持,增加了開發和維護的難度。Vxworks不公開源代碼,如果使用Vxworks,需要與風河公司(Windriver)合作,由其進行內核移植和底層開發,不利于接口平臺的后續調整與擴展。
實時Linux是在通用Linux操作系統的基礎上,通過添加實時內核補丁的方式,滿足開發者實時性的需求。相對于Linux操作系統,實時Linux的實時性得到了大幅提高。此外,實時Linux保留Linux操作系統對TCP/IP協議棧、文件系統等的支持,應用代碼開發與Linux下幾乎完全兼容。并且實時Linux為開放源代碼,方便接口平臺的后續調整與擴展。
綜合考慮,ATP接口平臺選用實時Linux操作系統Xenomai作為應用軟件開發的平臺。
4 事件調度機制
4.1 機制設計背景
應答器報文激活是ATP接口平臺需要進行特殊處理的接口任務。
ATP設備通過BTM接收軌旁應答器報文數據,應答器報文為ATP提供多種信息,包括線路信息、公里標等。ATP使用應答器定位當前位置,并由SDU根據采集到的速度脈沖信號,不斷刷新位置信息。當列車到達下一個應答器處時,ATP設備接收應答器報文,并判斷接收位置是否與預期位置相符。如果接收位置與預期位置在一定誤差范圍內,ATP認為接收成功;否則,認為應答器報文接收錯誤。接收位置與預期位置的誤差范圍一般為十米量級,在CTCS-3級列控系統中,如果列車以最高速度350 km/h運行,相當于列車100 ms內的位移,因此要求在仿真系統中,應答器報文激活的時間精度須低于100 ms。
在仿真系統中,仿真平臺模型的運行環境為非實時系統服務器,而且以太網并不是硬實時的通信網絡,因此總體來看,仿真系統的實時性為軟實時,無法保證每次應答器報文激活的時間精度必然低于100 ms。
為了保證應答器報文激活精度,提出事件調度機制。事件調度機制主要依賴于“仿真時間同步”和“事件調度”兩個概念。“仿真時間”是虛擬仿真系統的時間,在物理上,是仿真服務器的本地時間,“仿真時間同步”是為了實現子系統與“仿真時間”同步而進行的時鐘同步措施;“事件”是改變對象狀態的一次動作,每個事件包含一個仿真時間戳及完成該事件對應的方法指針,在應答器報文激活的過程中,一次應答器報文激活即是一次“事件”。“事件調度”就是對仿真系統中產生的事件按仿真時間的先后進行排序,然后按順序觸發。
4.2 事件調度
針對應答器報文激活,事件調度具體實現如下:仿真系統為ATP接口平臺提供添加仿真時間戳的信息包,包括列車速度、加速度、位置等,用于計算應答器報文激活時刻,ATP接口平臺收到所有信息包之后,根據不同時刻的列車速度、加速度、位置等信息,和下一個應答器的位置,計算激活應答器報文的仿真時間,并按時激活。
4.3 仿真時間同步
為了使ATP接口平臺能夠按照仿真時間進行“事件調度”,需要進行仿真時間同步。
ATP檢查報文位置誤差時,實際上是比較兩個應答器之間的額定距離(應答器報文指示的兩個應答器之間的距離)與接收距離(實際接收到兩次應答器報文時的位置之差)之間的差距,兩個應答器之間的額定距離是固定的,根據仿真系統的列車動力學模型的設計原則,如果應答器報文激活嚴格按照動力學模型的仿真進行,接收距離應與額定距離一致,實際上之所以產生誤差,主要原因在于單次應答器報文激活時機的時間精度不高,導致ATP接口平臺兩次應答器報文激活之間的時間間隔差過大,產生接收距離誤差。
根據上述分析,接口平臺與仿真系統之間的時間同步,重點不是時間精確一致,而是兩者時間進度一致,以保證兩次應答器報文激活之間的時間間隔比較精確。
4.4 機制總結
采用事件調度機制進行激活應答器報文操作,應答器報文激活的時間誤差主要由ATP接口平臺內部操作系統任務切換延時和“單次調整最大值”決定,通過調整同步間隔,可以將應答器報文激活的精度控制在10 ms量級,滿足應答器報文激活的實時性需求。
5 總結
本文詳細分析在CTCS-3級列控仿真系統中ATP實物設備接入仿真平臺面臨的實時性問題,并對ATP接口平臺的實時性進行詳細研究與分析,針對ATP接口平臺實時性設計中的關鍵問題給出解決方案。本文提出的實時性解決方案不局限于CTCS-3級列控仿真系統中的ATP接口平臺,對其他實物設備接入仿真系統也有一定借鑒意義。
[1] ERTMS/ETCS System Requiems Specification [S].
[2] ERTMS ETCS functional requirement specification [S].
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25