關于單相異步電機定子繞組接線與轉向問題探討
2012-07-29 04:47:46程寬
應用能源技術 2012年1期
關鍵詞:磁場
程 寬
(黑龍江省節能技術服務中心 黑龍江 哈爾濱 150001)
在單相異步電動機中,凸極式罩極異步電動機氣隙中的合成磁場移動的方向總經定子極面的未罩部分移向被罩部分,其轉子的轉動方向與合成磁場移動的方向相同。隱極式罩極異步電動機氣隙中的合成磁場的旋轉方向總是經定子極面的主繞組部分移向起動繞組部分,其轉子的轉動方向與合成磁場的旋轉方向相同。下面著重談一談單相起動繞組起動異步電動機、單相電容起動異步電動機、單相電容運行異步電動機、單相電容起動和運行異步和電動機的轉向問題。
如圖1所示。
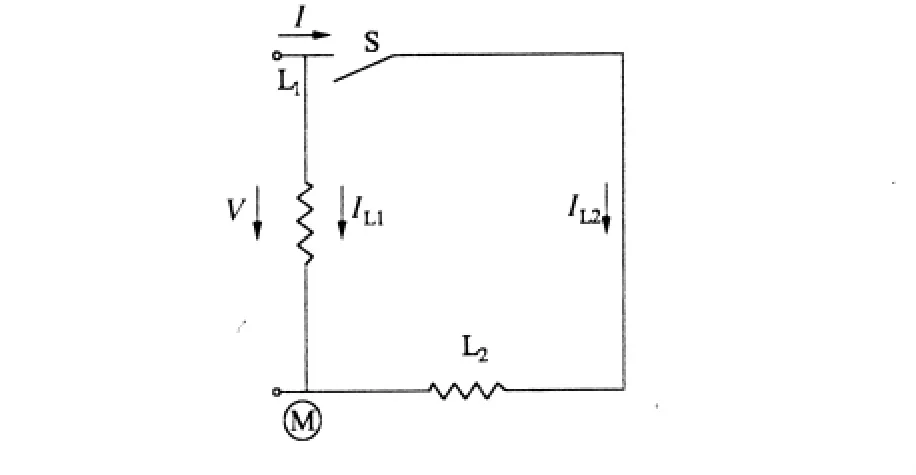
圖1 單相起動繞組起動異步電動機的接線圖
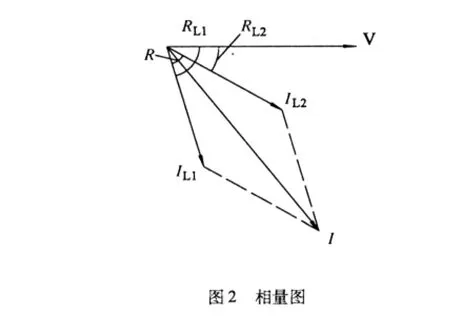
S為離心開關的觸點或起動繼電器的常合觸點。起動時,主繞組L1和付繞組L2接在同一電源V上。由于主繞組電路中的感抗大于付繞組電路中的感抗,所以主繞組電路中的電流IL1滯后于電源電壓V的角度ΦL2大,IL1與IL2間存在一相位差Φ,即IL1超前IL2一個角度Φ。Φ一般為30°~40°。其相量圖如圖2所示。
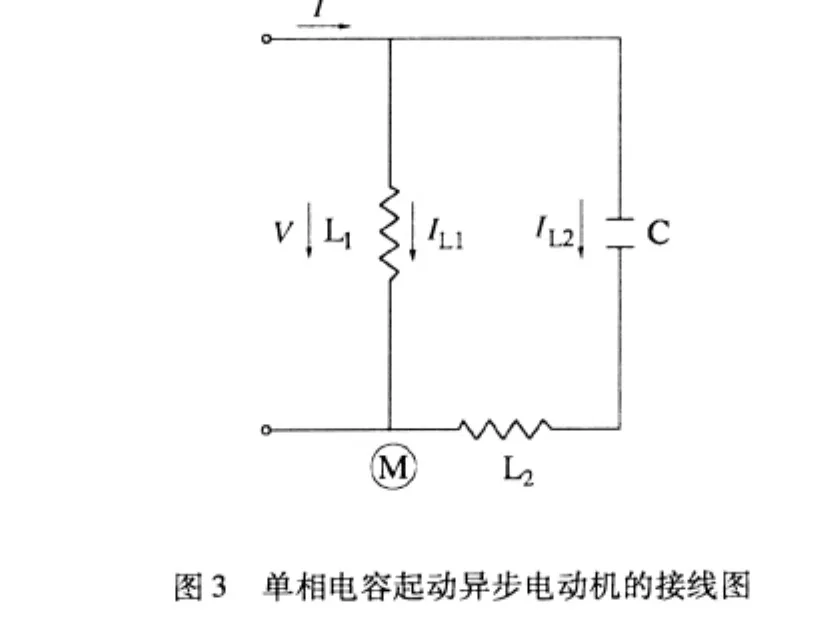
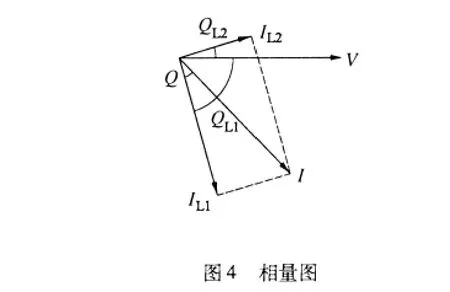
單相電容起動異步電動機的接線圖如圖3所示。在主繞組電路邊呈感性,而在付繞組電路中,容抗大于感抗和電阻呈容性。所以,如果選擇電容量,就可以使起動時付繞組中的電流IL2超前主繞組電路中電流IL2的角度Φ約為90°。其相量圖如圖4所示。請注意:單相起動繞組起動異步電動機與單相電容起動異步電動機起動后,雖然在轉速達到75%~80%的額定轉速,其離心開關或起動繼電器S就將斷開付繞組,但電動機仍按起動時的轉動方向繼續旋轉下去。
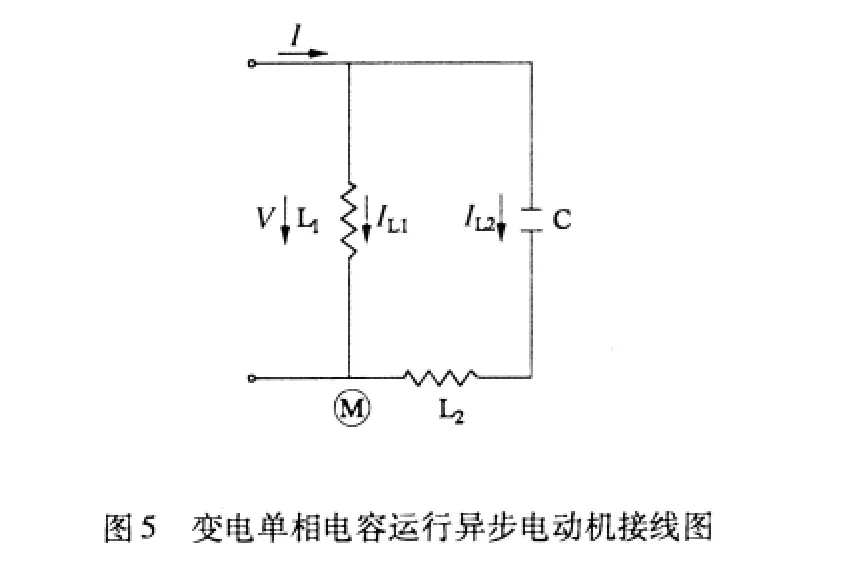
如果去掉單相電容起動異步電動機電路中的離心開關或起動繼電器,付繞組按長期接在電源上來設計,電容器的電容量也按此來選擇,則變電單相電容運行異步電動機,其接線圖如圖5所示。這種電動機在運行時,付繞組電路中的電流超前主繞組電路中的電流等于或接近90°。
單相電容起動和運行異步電動機綜合了單相電容起動異步電動機與單相電容運行異步電動機的優點,即起動和運行時付繞組電路中的電流超前主繞組電路中的電流的角度均在90°左右。如果主付繞組磁勢的幅值相等,則其氣隙合成磁場為圓形旋轉磁場,可獲得較大的起動和運行轉矩。這種電機的接線圖如圖6所示。圖中C2為起動電容,C1為工作電容,S為離心開關。
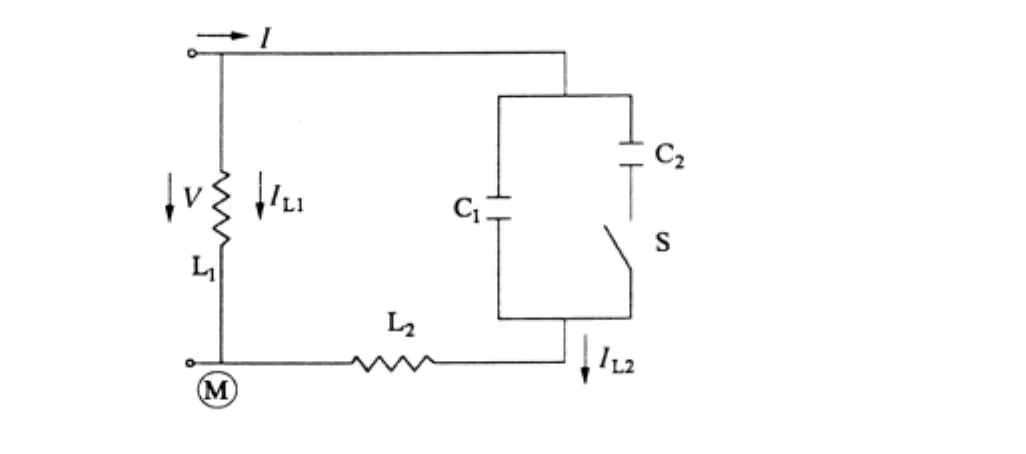
圖6 單相電容起動和運行異步、電機的接線圖
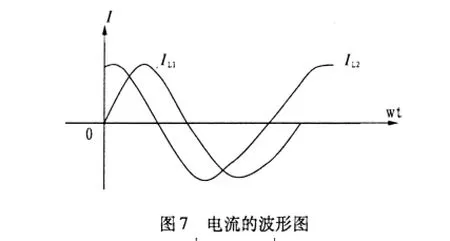
通過以上分析可知,單相起動繞組起動異步電動機、單相電容起動異步電動機、單相電容運行異步電動機、單相電容起動和運行異步電動機這四種型式的電動機的付繞組電路中的電流都超前其主繞組電路中的電流一定的角度。具有代表性的是超前的角度等于90°。且兩相繞組在空間也相隔90°的電角度,寫出其瞬時值表達式:
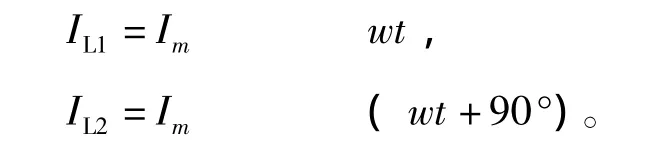
并規定電流為正時,電流從繞組的始端流入,從末端流出;電流為負時,電流從繞組的末端流入,從始端流出。根據IL1與IL2的瞬時值表達式畫出電流的波形圖如圖7所示。
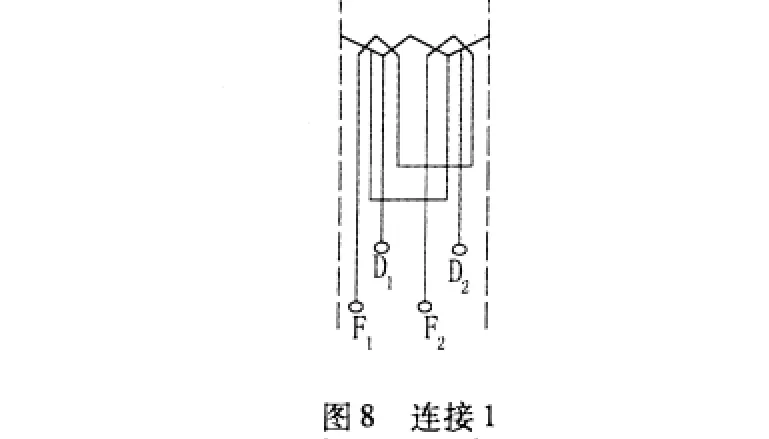
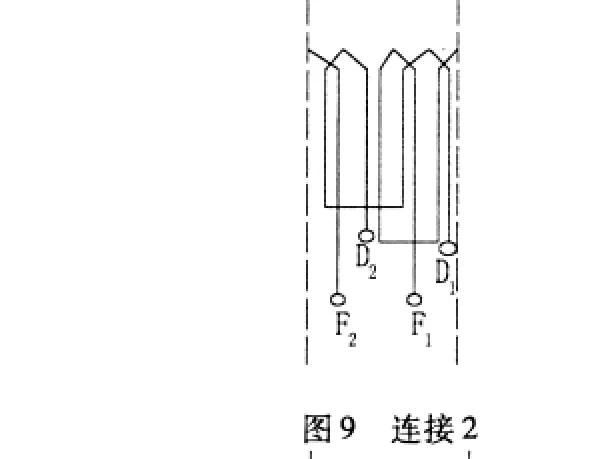
如果該電動機按圖8或圖9所示對繞組進行展開連接,副繞組L2在空間位置滯后主繞組L1為90°電角度。從繞組引出線端觀察,若D1(從主繞組始端)在F1(付繞組始端)的右邊或D2在F2的右邊,則為L1超前L2;反之,若F1在D1的右邊或F2在D2的右邊,則為L2超前L1。超前或滯后的角度按相鄰的異相繞組的對應邊所占槽間距離的電角度來判斷。根據兩繞組流過電流的情況可作出其合成磁場為逆時針方向。
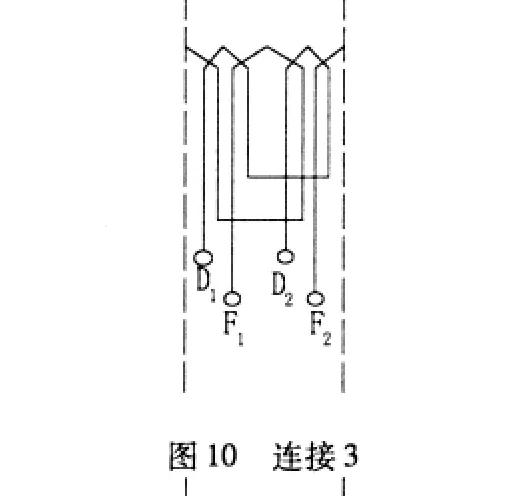
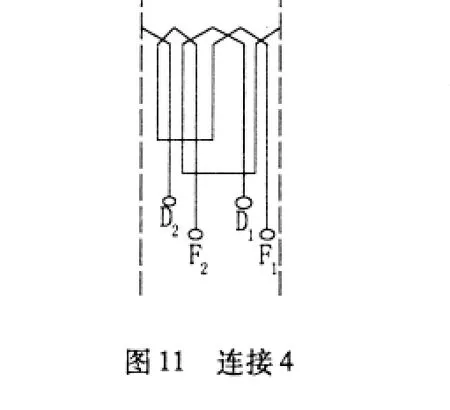
如果上述電動機按圖10或圖11所示繞組展開圖接線,L1在空間位置滯后L2為90°電角度。其合成磁場的轉向為順時針。
若L1電路中的電流與L2電路中的電流的相位差不到90°或大于90°小于180°,其判斷轉向所得到的結論與相位差正好等于90°時是一樣的。
從以上的分析可得出最后的結論,不管是單相起動繞組起動異步電動機還是單相電容起動異步電動機、單相電容運行異步電動機以及單相電容起動和運行異步電動機,只要主繞組在空間位置超前付繞組如圖8、圖9所示,則電動機轉向為逆時針,反之,若付繞組在空間位置超前主繞組引出線端觀察到電動轉向為順時針。最后請注意:電動機的公共線必須從D1與F1或D2與F2的連線處引出。
[1]吳麗麗,肖生基.發電機定子公路裝運安全穩定性研究[J].森林工程,2007,23(3):67-69.
[2]張繼文.基于Q參數化方法的水輪發電機組魯棒控制器設計[J].森林工程,2008,24(1):48 -50.
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
數學物理學報(2022年1期)2022-03-16 06:14:50
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化(高中版.高考數學)(2017年3期)2017-05-04 07:15:09
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
電子制作(2016年1期)2016-11-07 08:42:44
Coco薇(2016年1期)2016-01-11 16:53:24
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:23