高速列車橫向振動自適應神經模糊控制的仿真
2012-08-03 03:19:48成新明唐啟志
鐵道機車車輛 2012年5期
成新明,唐啟志
(中南大學 信息科學與工程學院,湖南長沙410083)
隨著列車速度的提高,鐵道車輛振動也逐漸增大,并將做多自由度的隨機振動,從而列車運行的安全性、平穩性和舒適性也隨之下降。傳統鐵道車輛的被動懸掛方式雖然能在一定程度上滿足鐵道車輛動力學性能的要求,但局限性在于其懸掛特性僅與連接懸掛元件的局部相對運動有關,且其懸掛特性在車輛運行過程中不能隨激勵的變化而任意進行調整,這就限制了機車車輛性能的提高,同時也使得列車不能適應復雜的運營線路。半主動懸掛系統結構簡單,無須力源,成本和維護費用較低,能有效地改善機車車輛橫向動力學性能,目前是列車提速并改善其橫向平穩性的有效方法[1-2]。迄今為止,國內外學者在半主動懸掛控制策略方面做了大量的工作。而選擇合理的控制策略實現減振器阻尼的調節是控制的關鍵。應用于車輛半主動懸掛控制系統的控制策略主要有線性最優控制、魯棒控制、自適應控制、預測控制、模糊控制和神經網絡控制等[3]。對于這些控制方法,都有自己的優缺點。就模糊控制和神經網絡控制來說,模糊控制的缺點是控制精度低、控制規則難建立,當控制規則確定后又不會改變,這就導致了模糊控制的自適應能力差。而盡管神經網絡能夠逼近任意非線性函數,在半主動懸掛系統中用做控制器和辨識器具有自適應能力和較強的學習功能,但神經網絡算法比較復雜,收斂速度無法很好地保證,實時性不好。
本文提出了把模糊控制和神經網絡控制相結合的方式,充分利用模糊控制的強推理能力和神經網絡控制的強自學能力。神經模糊控制被視為神經網絡和模糊控制之間的灰盒技術,它可以有效的解決非線性強,精確模型難建立的問題[4]。神經模糊控制應用于半主動懸掛系統,這在一些文獻中也有所研究,如文獻[5]就是把神經網絡根據振動響應的方差遞推結果來辨識車體的振動情況實時調節模糊控制器的量化因子,使模糊控制器對路面的變化具有自適應能力,但研究結果對于輪軌突變的激勵控制效果不是很明顯。而在本文中,神經網絡是對動態采集的數據進行訓練,在訓練過程中不斷調節模糊控制的控制參數,從而來改變控制規則,使控制規則能夠隨著路面的變化而變化。這種設計不僅可以減少列車的振動,而且還能適應模型建立不精確、傳感器測量不準確等情況,不斷提高控制器的自適應能力。
1 列車半主動懸掛的數學模型
本文研究的是1/2車輛模型橫向振動的半主動懸掛控制系統,因此將車輛模型進行簡化[6]:忽略車輪和軌道的非線性蠕滑作用,車體的彈性模態、鋼軌的彈性、輪對的擾動等因素,只考慮車輛的橫向振動,即考慮列車的車體,轉向架和輪對的橫移運動,分別用yc,ya,yt來表示。其橫移微分方程為:
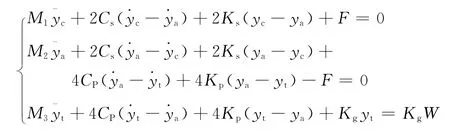
各參數如圖1所示。其中M1為整個列車車體質量的一半;M2為一臺轉向架的質量;M3為兩對車輪的質量;CP,CS分別為一系懸掛和二系懸掛橫向阻尼系數;Kp,KS分別為一系懸掛剛度和二系懸掛剛度;Kg為車軌剛度;F為控制器輸出的可變阻尼力;W為輪軌的輸入激勵,包括軌道的方向不平順和水平不平順。
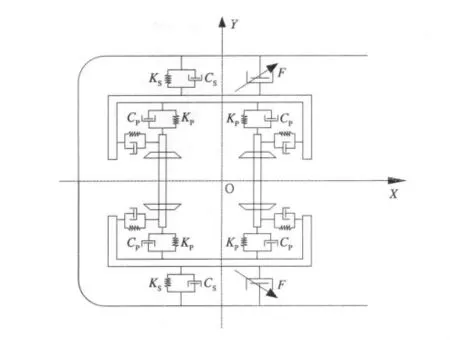
圖1 列車半主動懸掛模型
2 列車半主動懸掛自適應神經模糊控制策略的設計
在半主動懸掛控制方法的研究領域,大多數的研究人員并不是長期在現場調試減振器的操作專家,因此并不能根據經驗和直覺制定模糊規則。即使是經驗豐富的操作專家,對于一些復雜的操作系統,也不能僅憑直觀經驗制定控制規則,并且憑經驗得到的模糊規則含有很多的主觀因素,不一定能夠滿足控制的要求。
在列車半主動懸掛系統中,針對模糊控制的控制規則建立難這一難題,提出了把神經網絡嵌入到模糊控制器中,在通過神經網絡對理想數據進行自我學習的基礎上,調節模糊控制器的隸屬函數和輸出參數,來得到列車半主動懸掛系統的模糊控制器。為了讓模糊控制器能使列車在不同的激勵下產生合適的阻尼力,設計的神經網絡一直對列車車身的橫向加速度和半主動懸掛的動撓度(車身和轉向架之間的速度之差)進行采集,采集的數據經過模擬仿真得到合適的阻尼力,然后把加速度、動撓度和阻尼力這三者數據輸入到神經網絡中進行訓練,通過反饋傳播神經網絡控制改變模糊控制的控制規則,最終得到車輛半主動懸掛控制系統的自適應神經模糊控制器,其中控制原理圖如圖2所示。
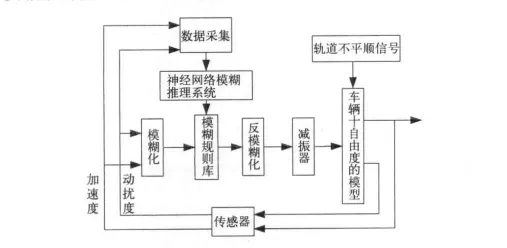
圖2 自適應神經模糊控制的原理圖
2.1 自適應神經模糊推理系統的設計
針對于普通的模糊控制規則建立難和需要靠人的思維一次一次調整隸屬函數才能達到減小誤差、增進效能的缺點,本文借助于神經網絡的自學習功能對模糊控制器進行改善,利用神經網絡的反向傳播算法和最小二乘法來完成對輸入—輸出數據對的訓練,從而建立起一套if-then的規則,慢慢調配出適當的隸屬函數來滿足所需推論中輸入輸出的關系,但此自適應神經模糊控制只適用于Sugeno型模糊控制。自適應神經網絡模糊推理系統(ANFIS)的結構圖如圖3所示[7-8],其中X1,X2是系統的輸入,y是推理系統的輸出,均為提供的數據對。網絡同一層的每個節點具有相似的功能,用Y li表示第1層第i個節點的輸出,依此類推。此結構分為5層:
第1層為輸入信號模糊化,其中Ai,Bi為模糊集,μA i(x i)是模糊集的隸屬函數,每個節點對應的輸出可表示為:

第2層為實現規則運算,輸出規則的適用度,規則運算采用乘法:

w i為每條規則的激勵強度。
第3層為節點進行各條規則適用度的歸一化計算。
第4層用于計算各條模糊規則的輸出:

式中y i為一階的Sugeno型模糊控制的輸出,p i,q i,r i為結論參數。
第5層的單節點是一個固定節點,計算輸入信號的總輸出:

在自適應神經模糊算法的混合學習過程中,前向學習到第4層,推論的參數p i,q i,r i由最小二乘估計法求得,通過反向學習的最大梯度法,返回誤差變化率以更新參數p i,qi,r i。在改變這些參數的過程中,各種對應A i與B i的隸屬函數參數就隨之改變,從而使控制器具有自適應能力。
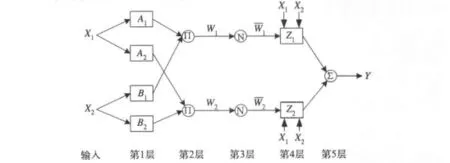
圖3 自適應神經網絡的模糊推理系統結構圖
2.2 數據的采集及訓練
在列車半主動懸掛自適應神經模糊控制器中,訓練數據的采集是很重要的一步,首先建立軌道不平順輸入(包括水平不平順和方向不平順)和半主動懸掛仿真模型,然后構造評價函數,本文的評價函數是車身的加速度和動撓度這兩個性能指標值進行組合得到的,它們滿足以下公式:

其中J為評價函數;β為權值參數,是介于[0,1]之間的實數,其值大小直接反映對加速度和動擾度的加權程度,在本文中β值取0.6;a為車身的加速度;νc-νa為動擾度。評價函數確定之后,然后就是對數據采集進行編程。數據采集的程序有兩個嵌套的循環構成,外層循環控制仿真的步長,在本文中設置的步長為0.01 s。在仿真時間為10 s的時間內,總共得到1 000個有效的數據。內層循環是得到一個合適的阻尼力,阻尼力從最小值(Fmin)開始變化,一直變化到最大阻尼值(Fmax),把每一次阻尼值輸入到車輛半主動懸掛模型進行仿真,得到的輸出結果由評價函數進行比較,把評價函數值最優的阻尼力保存下來,作為在當前激勵下的最優阻尼力,程序的流程圖如圖4所示。把采集的數據輸入到ANFIS進行訓練,通過ANFIS的逆向學習方式不斷調節一階T-S模糊系統的輸出參數,從而來達到隨著路面變化來改變模糊控制器內部規則的目的,使模糊控制器對路面情況具有一定的自適應能力。
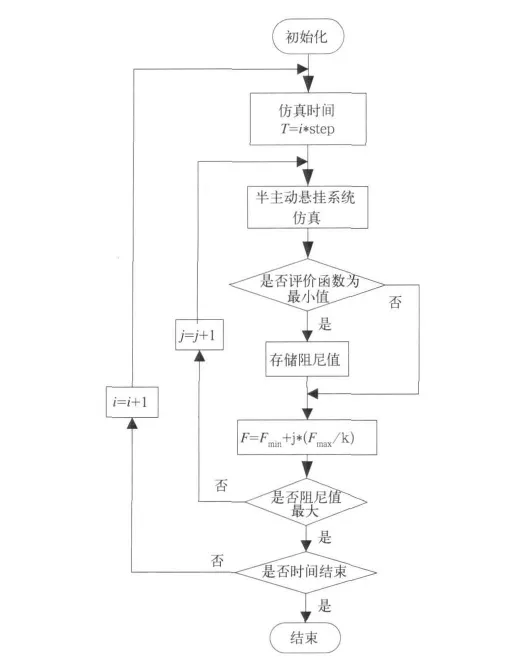
圖4 數據采集程序流程圖
3 車輛性能評優標準
乘客乘坐車輛時,車輛在做連續的振動,時間一長會使乘客感覺疲勞,還有可能引起乘客的身體不適,經過大量研究數據表明,人對于低頻振動很敏感,就橫向振動而言,人體對頻率在2 Hz以下的振動最敏感;為了建立一個標準來對車體的振動進行評估,提高乘車舒適度和平穩性,本文采用一種比較直接的方式——求加速度均方根的方法來對乘坐的平穩性進行評估,具體的計算公式如下:

ave為加速度均方根值;a(t)是在時間T1和時間T2段內采集的列車車身的加速度。
同時對車輛的性能進行評價時,除了加速度的大小這一因數外,加速度的振動頻率也是一個很重要的因數。為了更好的對仿真結果進行對比評優,本文還采用了國際上對高速列車懸掛性能評估的常用指標——斯佩林(Sperling)指標,用W表示其指標,計算公式為[9]:

式中H為振動加速度;f為振動頻率;F(f)為與振動頻率相關的修正系數,其值如表1所示[9]。

表1 頻率修正系數
根據每一組的平穩性指標Wi得到整個波形的平穩性指標W∑:

由指標W∑的值來評價平穩性的等級如表2所示[10]。
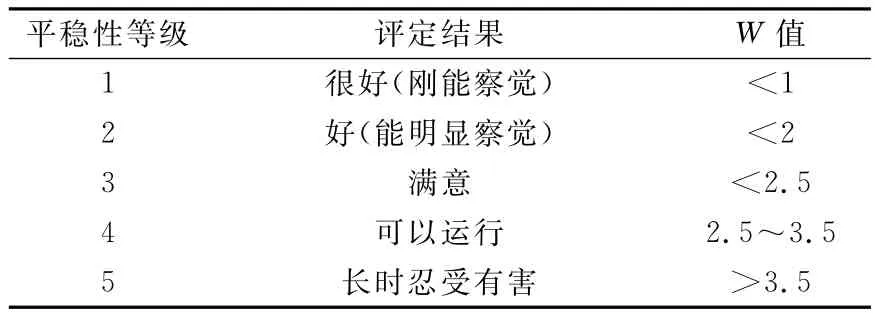
表2 車輛運行舒適度指標與等級
4 仿真結果
控制系統設計時,為了和實際系統相吻合,仿真時考慮了如下3點:
①對于控制系統而言,時滯是不可避免的,所以在建立模擬系統時設置了控制系統的延遲時間Δt為10 ms;
②根據實際情況,列車半主動懸掛系統中的阻尼值有一個范圍,即在仿真時設置了阻尼器的最大阻尼Fmax和最小阻尼Fmin,阻尼器的阻尼值在這兩者之間進行不斷的變化。
③在列車半主動懸掛系統中,根據天棚阻尼原理(阻尼力的方向總是和車身振動速度的方向相反),使產生的阻尼力總是對半主動懸掛系統做負功。但我們測得的是列車的轉向架和車身的相對速度,所以只能設計接近于天棚阻尼控制器的阻尼力,在仿真時設計的阻尼力的控制規則為:

F為阻尼力;vc為車身的速度,va為轉向架的速度。當vc(vc-ca)>0時,阻尼控制器做負功,能夠減弱車身的橫向振動,當vc(vc-ca)≤0,為了不使阻尼控制器做正功,所以關閉阻尼控制器,使阻尼力為最小值。
通過MATLAB對整個系統進行仿真,同時考慮以上3點,仿真結果如圖5至圖9所示,各類型的性能值如表3所示。從圖5、圖6可以看出,基于神經網絡模糊控制的半主動懸掛系統的橫向振動加速度明顯小于被動懸掛系統。由表3可以看到,車輛橫向振動加速度的峰值由1.045 8 m/s2降低到0.580 8 m/s2,改善了44.5%,其均方根由0.258 99 m/s2下降到0.105 66 m/s2,改善了59.2%。平穩性也從2.07下降到1.56,從表2可以看出平穩性等級由2級變為了1級。從圖7和圖8可知,經過控制后的半主動懸掛的動擾度有所增加。這是因為半主動懸掛的阻尼器所提供的阻尼力與動擾度成正比,方向與相對振動速度成反比,由于動擾度是振動加速度的積分做差求得,因此動擾度的相位滯后振動加速度相位90°,當振動加速度減小時,動擾度卻有稍微的增加。圖9為被動控制和半主動懸掛控制車體中心加速度的功率譜對比圖,從圖中看出半主動控制減振裝置在1~20 Hz的振動成分明顯低于被動控制的減振器,而這段頻率包括了影響列車乘坐舒適度比較大的頻率段。
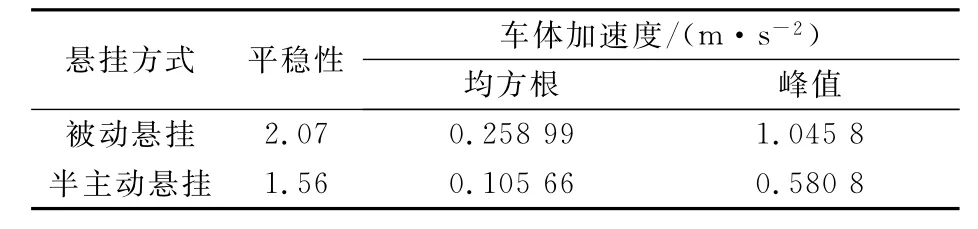
表3 列車橫向振動的性能參數
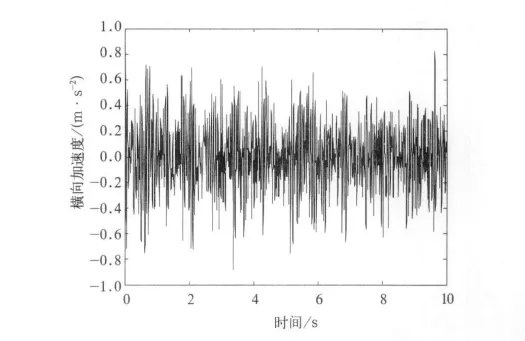
圖5 被動懸掛系統橫向振動加速度
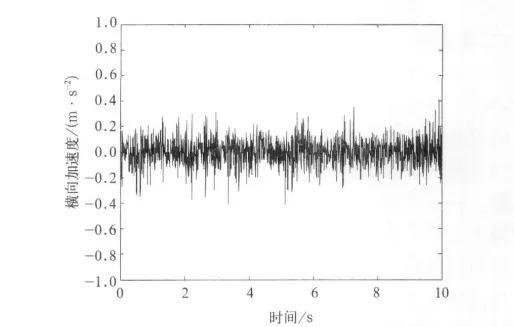
圖6 神經網絡模糊控制的半主動懸掛加速度
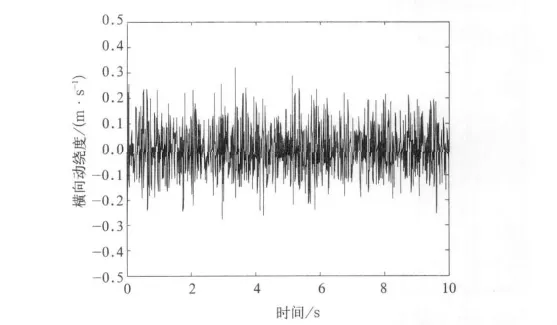
圖7 被動懸掛車體橫向振動動擾度
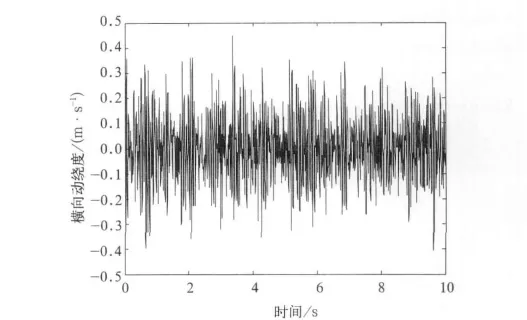
圖8 半主動懸掛車體橫移振動動擾度
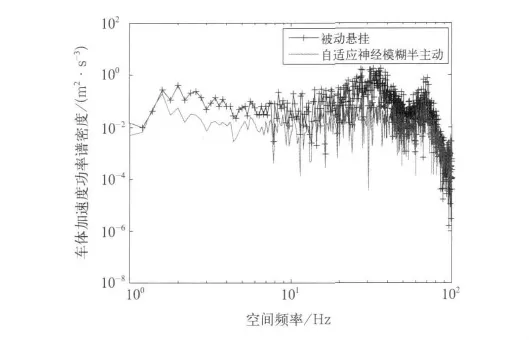
圖9 車體橫向加速度功率譜
5 結束語
本文針對高速鐵路車輛橫向二系半主動懸掛系統,提出了基于神經網絡的自適應模糊控制。對于列車車輛輪軌關系的不確定性以及本身的強非線性特性和一定范圍內的參數時變性,這種控制方法表現出很大的優勢。針對模糊控制的控制規則難建立的缺點,運用神經網絡對采集數據進行訓練,得到適合列車在不同軌道譜平穩運行的模糊規則,使列車對輪軌激勵的變化具有自適應能力。結果表明,采用基于神經網絡的模糊控制器的半主動懸掛相對于被動懸掛來說,半主動懸掛能夠更有效的衰減車體振動,表現出很強的自適應能力,大幅度提高了車輛的乘坐舒適度。
[1]姚建偉,嘎 尼.采用主動懸掛技術是改善機車橫向動力學性能的有效途徑之一[J].鐵道機車車輛,2002,22(12):177-179.
[2]H.R.O’Neill,G.D.Wale.Semi-active Suspension Improves Rail Vehicle Ride[J].Co mputing &Contr ol Engineering Jour nal,Aug 1994,Vol.5:183-188.
[3]丁問司,卜繼玲,劉友梅.我國高速列車橫向半主動懸掛系統控制策略及控制方式[J].中國鐵道科學,2002,4(23):1-7.
[4]Babuska R,Verbvruggen H.Neuro-fuzzy methods for nonlinear system identification [J].Annual Reviews in Control,2003,27(1):73-85.
[5]管繼富,侯朝楨等.基于神經網絡的半主動懸架自適應模糊控制[J].汽車工程.2003.(6):586-590.
[6]陳春俊,王開云.高速列車橫向半主動懸掛系統建模研究及分析[J].振動與沖擊,2006,25(4):151-154.
[7]顧秀萍,自適應神經模糊推理系統(ANFIS)及其仿真[J].火力與指揮控制,2010,35(2):48-49.
[8]Cheng-Tao Wu,Tsu-Tian Lee.Neural-Network-Based Optimal Fuzzy Control Design for Half-Car Active Suspension Systems[J].IEEE,2005:376-381.
[9]倪純雙,王悅明,淺析平穩性指標和舒適度指標[J].鐵道機車車輛,2003,23(6):1-3.
[10]萬里翔,許明恒.鐵道車輛運行平穩性評價方法的研究[J].鐵道機車車輛,2001,21(1):8-11.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
幸福(2018年33期)2018-12-05 05:22:42
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
