基于模糊控制的LED路燈控制系統的理論研究
2012-08-08 08:09:48李蓮李立
照明工程學報 2012年4期
關鍵詞:系統
李蓮李立
(天津市復雜系統控制理論及應用重點實驗室,天津理工大學自動化學院,天津 300384)
1 引言
當前,國內外路燈控制方式主要采用光控和時控相結合的方法,也有部分城市為了達到節能的目的,在后半夜道路行駛車輛較少時關閉部分路燈——即所謂的“半夜燈”。這種控制方法雖然達到了節約電能的目的,但是由于路面照度不均,反而帶來了更多的安全隱患[1]。為了避免交通事故的發生,大多城市仍采用了“全夜燈恒照度”的路燈控制方式,這無疑造成了很大的浪費。本文主要針對后半夜道路行駛車輛少的情況,利用道路現有的雷達測速儀與照度傳感器相結合,運用模糊控制算法設計了一個智能路燈節能控制系統,使得車輛行駛方向前方的部分路燈保持在一個較高的亮度,而車輛行駛過后路燈恢復到一個較低的亮度,從而達到節能的目的。
2 節能系統總體設計
系統采用模糊控制算法,根據實際的照明需求,對路燈電壓及照度情況進行動態的智能化管理。系統的基本控制流程圖如圖1所示。當后半夜城市道路行駛車輛較少時,使車輛行駛前方的部分路燈處于較高的亮度,隨著車輛的不斷前進,前方的路燈一盞一盞的變亮,而后方的路燈隨之變暗[2]。
系統的通信方式主要采用GPRS與ZigBee技術相結合的無線通信技術,達到對路燈單燈控制的目的。路燈控制方面硬件主要包括照度傳感器,雷達測速儀,智能控制器,ZigBee終端設備,GPRS模塊等。
如圖1所示,照度傳感器用來感應外界的光照,當外界環境的亮度低于某一特定值時,則自動開啟路燈,經過一定的延時后,智能控制器通過可變電抗器調節路燈到一個較低的亮度;雷達測速儀主要用于后半夜,道路行駛車輛較少時來測量車速,經模糊化處理得到調節路燈亮度的延時;可變電抗器接收智能控制器的命令進行調壓,從而改變路燈端電壓,實現路燈的亮度調節功能;GPRS模塊負責控制中心與路燈ZigBee終端設備的通信。
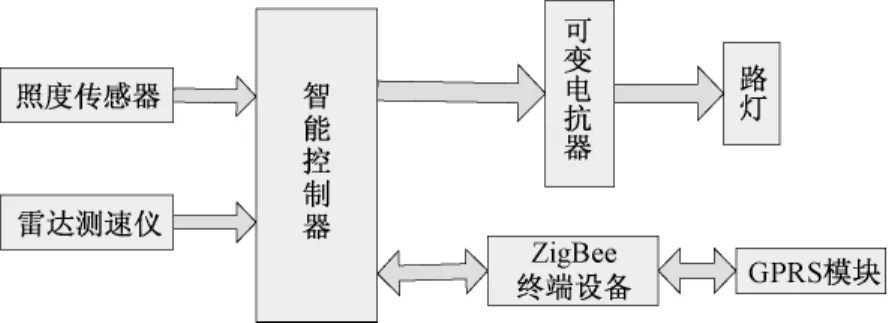
圖1 系統的硬件框圖
3 無線通信模塊
本系統的無線通信主要采用GPRS與ZigBee相結合的通信方式,上層網絡通過GPRS模塊與上位機進行通信,下層通信主要是由ZigBee終端模塊完成的。下層網絡采用的ZigBee網絡支持星型網、樹狀網和網狀網三種拓撲。網狀網是一種可靠性高的Ad hoc網絡,網絡中的所有結點都是平等的,任何結點的離開或者加入都不會影響整個系統的運行。因此,將每一條街道劃分為一個子區域,子區域內的網絡采用網狀網,每個子區域設置一個ZigBee協調器,各個單燈結點通過協調器與GPRS網絡連接 (圖2)。
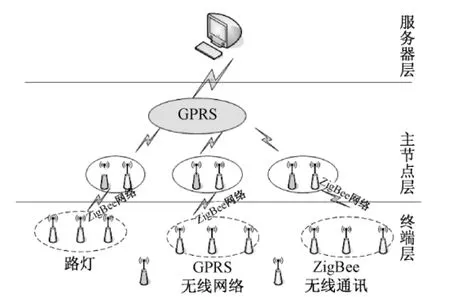
圖2 系統網絡結構圖
本系統采用的ZigBee無線終端設備為CC2430無線通信模塊,CC2430芯片內集成增強的8051微處理器內核和符合IEEE802.15.4標準的2.4GHz射頻收發器,具有優良的天線接收靈敏度和強大的抗干擾性能,處于休眠模式時功耗小,是首款符合ZigBee技術標準的系統單芯片。由于CC2430中帶有一個8位的8051微控制器,所以在硬件設計中可以省去微控制器模塊,降低控制系統的成本[3][4]。
4 模糊控制器的設計
本設計將LED路燈工作情況分為三個等級:全功率、半功率和關閉。夜晚車輛多時,路燈處于全功率工作狀態,進入后半夜車輛較少時,在半功率狀態工作。模糊控制的實現過程為:當雷達測速儀檢測到車輛的速度信號時,首先調整特定范圍內的路燈亮度,速度信號經A/D轉換后送入智能控制器進行模糊化處理后得到時間t,即特定范圍外下一盞路燈變亮的延遲時間,同時也是車輛行駛過后,路燈逐漸變暗的時間。控制原理圖如圖3所示[5]。
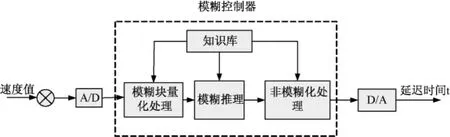
圖3 模糊控制系統原理圖
模糊控制器的設計主要包括以下步驟:模糊化過程、模糊控制規則的建立、精確化計算。
(1)模糊化過程
模糊化過程就是把輸入的數值,根據輸入變量模糊子集的隸屬度函數找出相應的隸屬度值的過程。本模糊控制系統只有一個輸入變量:車輛的速度值。將該速度值分為大 (PB)、較大 (PS)、中 (ZE)、較小 (NS)、小 (NB)代表了夜晚車速的全部情況。將輸出變量延時時間t分為短、中、較長、長四級,輸入輸出變量的隸屬度函數如圖4所示[6]。
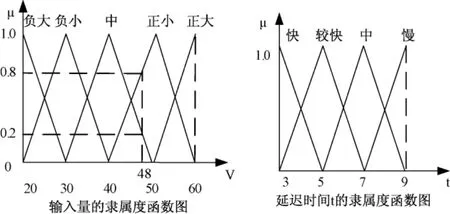
圖4 輸入輸出變量的隸屬度函數圖
(2)模糊控制規則的建立
模糊系統是用一系列基于專家知識的語言來描述的,專家知識常用“IF THEN”規則的行駛,而這些規則很容易通過模糊邏輯條件語句來實現。以下面的規則來對模糊控制器的工作情況進行簡單的說明:
規則1:如果速度為中,則延遲時間t為中
規則2:如果速度為正小,則延遲時間t為較快
(3)精確化計算
精確化計算就是把語言表達的模糊量回復到精確的數值,假定速度為48km/h計算,則
對應規則1,速度為中的隸屬度是0.2,延遲時間t為中的隸屬度為0.2;
對應規則2,速度為正小的隸屬度是0.8,延遲時間t為較快的隸屬度為0.8。
延遲時間t的模糊集如圖5中陰影部分所示,為了達到這一模糊集的最佳等效精確值,套用精確化過程重心計算法的積分公式,可得:

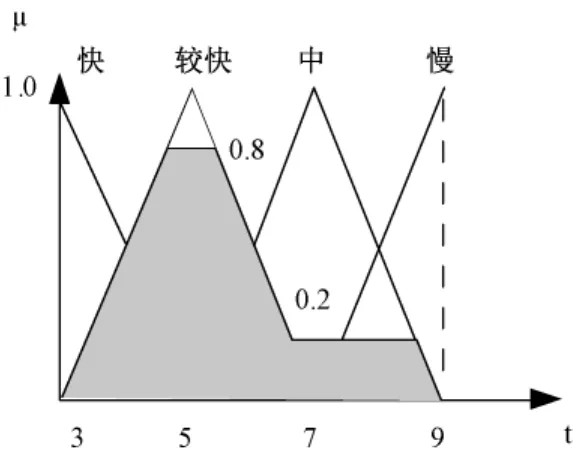
圖5 推理出的延遲時間隸屬度
從而得到延遲時間的確切值3.54s。路燈間距為50米時,速度為48km/h的車輛行駛一個路燈間距所用的時間為3.75s,與智能控制器輸出時間相差僅為0.21s,誤差較小,可以滿足車輛行駛前方特定范圍內路燈保持較高亮度的要求。
模糊控制器得出的延遲時間信號,經由ZigBee終端設備在局域網內傳遞給下一盞路燈,從而實現根據車輛的行駛速度來控制路燈的工作情況,既保證了行車的安全性,又達到了節能的效果。
5 系統的軟件設計
系統開關燈及節能控制的軟件流程圖如圖6所示。
系統上電后,先對各個單元進行初始化,然后根據照度傳感器的數值來進行判斷是否要開關燈,當照度達到一定要求,系統自動打開路燈并開始計時;計時時間到,LED路燈進入半功率工作狀態,之后當雷達測速儀檢測到車輛的速度信號后,由模糊控制器處理后得到路燈的延遲信號,信號通過ZigBee無線網絡傳輸給下一盞路燈以及距離車輛最近的路燈,從而控制路燈的工作狀態。
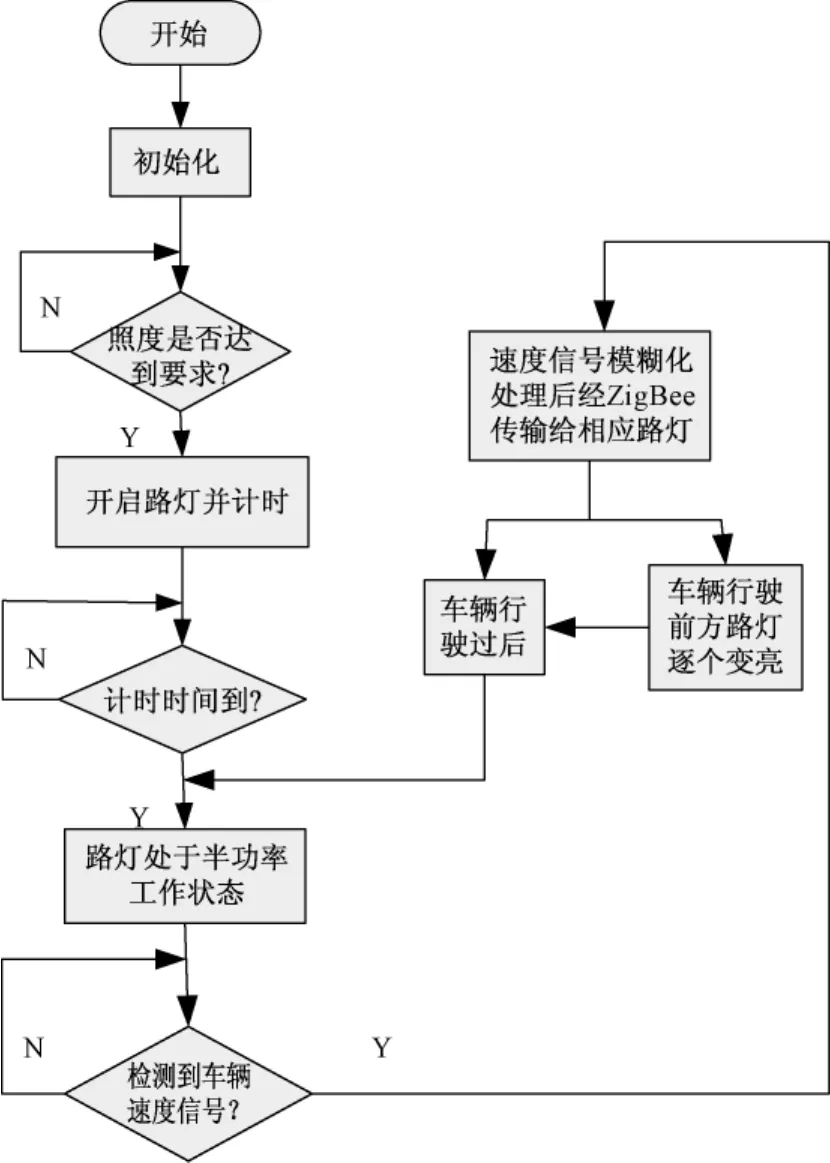
圖6 系統的軟件流程圖
6 結論
本節能控制系統采用了GPRS與ZigBee相結合的無線通訊技術,針對城市后半夜車輛的行駛情況運用模糊控制算法對路燈進行控制,真正做到了“在保證照明的情況下開著燈節電”,既達到了能源節約的目標,又滿足了城市的照明需求,具有廣闊的應用前景。
[1]曾一凡,吳春美,楊曉紅等.基于模糊決策的路燈節電等級控制系統的設計 [J].節能,2006,9:36~41.
[2]安雙利,錢銳,陸翔宇等.基于單片機智能控制的路燈節能系統的研制 [J].上海第二工業大學學報,2011年3月,28(3):49~53.
[3]郭佑民,劉娟,孟凡剛等.基于ZigBee的智能型LED路燈照明系統設計[J].蘭州交通大學學報,2010年8月,29(4):36~39.
[4]張偉,王宏剛,程培溫.基于GPRS的智能路燈遠程監控系統的研究[J].計算機測量與控制,2010,18(9):2104~2106.
[5]韋巍.智能控制技術 [M].機械工業出版社,2003.
[6]林濤,馬立君.基于模糊控制的路燈節能系統的設計[J].電子科技,2008,220(1):6~8.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
