基于高精基準的面對面垂直度評定與軟件開發
2012-08-16 08:03:22林翔
華東交通大學學報 2012年5期
林翔
(福建商業高等專科學校,福建福州350012)
1 垂直度評定的核心問題
按國標《GB/T 1958-2004》[1]規定,面對面垂直度誤差屬于位置公差中的定向誤差范疇,指實際被測平面要素相對于給定基準平面在垂直方向上的變動量,此變動量要符合“最小條件”原則,即將被測平面上的測點投影于基準平面,求取這些投影點的二維直線度誤差,此即為被測平面相對于給定基準平面的垂直度誤差值。
如果基準平面是已知的,即其平面方程(可記為π0∶a0x+b0y+c0z+d0=0的法矢T=(a0,b0,c0)已給出,從文獻[1]中關于被測平面對于基準平面垂直度誤差的概念描述可知,只要把被測平面上各點投影到基準平面,則求垂直度誤差實際上就是求全體投影點的二維直線度誤差,如此則空間問題就轉化為二維的問題;如果基準平面要素是通過測量獲得的(設基準上測量點集為P={Pk(xk,yk,zk),k=1,…,n}),毫無疑問要以測量點為依據擬合出平面作為基準平面π0,然后進行垂直度誤差評定。按照文獻[1]規定,擬合平面π0必須是通過平面度誤差計算過程而獲得的,才可以作為基準平面,進一步在π0的基礎上繼續進行面對面垂直度誤差計算。
顯然,問題的核心是如何求得符合“最小條件”的基準平面,只有在擬合出高精度基準平面的基礎上,才有可能求取高精度的面對面垂直度誤差。為此,業界專家們推出了不同的平面擬合方法:文獻[2-3]提出以“最小二乘平面”法求取基準平面,雖然合乎文獻[1]規定但計算精度有局限;文獻[4]用“直接比較法”與“坐標法”求取,對狹長平面之類的特殊情況用“光軸法”、“水平儀法”求取,方法簡便易行但精度不高;文獻[5]也有類似的情況。本文針對求取基準這一核心問題提出新算法,使基準平面的求取過程與垂直度誤差評定過程均符合“最小條件”的原則,從而得到高精度的面對面垂直度誤差值。
2 基準平面擬合
設基準平面上測量得到的點集P={pk(xk,yk,zk),k=1~n},擬合平面π0的法向量為T=(a0,b0,c0),如圖1。由文獻[1]規定可知,要使π0符合“最小條件”成為最佳擬合基準,π0的平面度誤差值計算過程必須要滿足“最小區域”原則,即須求得一對平行的平面包容點集P,且令兩平面間距離達到最小。
求最佳擬合基準的總體思路是:首先以“最小二乘法”求取初始擬合平面,進而將擬合平面的平面度誤差計算向“最小區域”靠近,令結果滿足“最小條件”。記由“最小二乘法”得到的初始擬合平面方程為π0(求取的算法與過程在文獻[2-3]中均有敘述,此不重述),初始平面度誤差為δ。經過觀察分析,發現可以通過有意識地細微轉動π0(即轉動π0的法方向),使δ值降下來。
設Pk(xk,yk,zk)至初始基準平面 π0距離為 δk,δi,δj分別為{δk,(k=1,…,n)}之最大值與最小值,相應點為 Pi,Pj,即 δi=max(δk),(k=1,…,n);δj=min(δk),(k=1,…,n)。
記初始平面度誤差 δ=δi+δj=max(δk)+min(δk)(k=1,…,n));Ai,Aj為 Pi,Pj在 π0的投影點,從 Ai點沿AiPi距離ε處取 Ai′點(ε是一很小的值),從 Aj點沿 AjPj距ε處取 Aj′,Ai′Aj′中點記為 S ,于 π0上取點 S′,令S′S ⊥ Ai′Aj′。
以 Ai′,Aj′,S′3個點作平面 π0′,π0與 π0′之間夾角甚小,可視 π0′為 π0繞 S′S 做微小轉動而獲得;從平面方程特點視之,π0′是以π0之法向量T=(a0,b0,c0)作微小轉動后生成的。
Pi,Pj,Ai′,Aj′四點共面,記為 π1,π0經 π1剖切成如圖2所示,易見 Pi至 π0′之距 δi′< δi,Pj至 π0′之距為 δj′<δj,即有 δi′+δj′< δi+δj,亦即當 π0經微小轉動生成 π0′后有可能把 δ值降下來,這正是拙文之總體思路所期盼的第一個結果。
究竟能否成功地將π0轉動生成π0′而令δ降下來,還需要計算點集P對π0′的平面度值δ′,與原平面度值δ進行比較以便判斷。比較的結果不外乎以下3種情況:
1)若 δ′<δ,π0′取代 π0,對新 π0重復上述的微小擾動,重復計算、判斷過程;
2)若 δ′≥δ,則縮小ε并重新計算出 π0′及 δ0′,判斷是否 δ′<δ;
3)若ε經多次縮小而成為非常小的值,已達到精度要求,則計算終止,此時δ就是符合“最小區域”要求的平面度誤差值,π0即所求的最佳擬合基準平面。
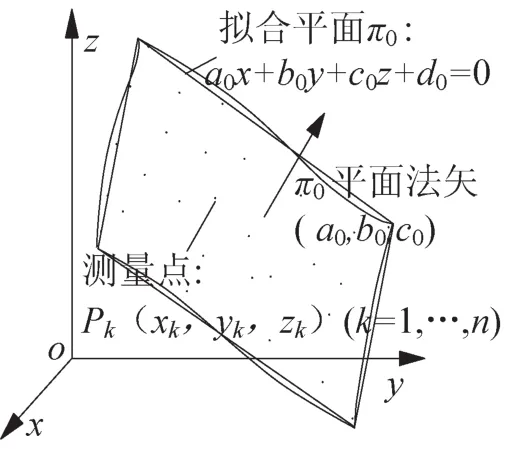
圖1 基準平面擬合示意圖Fig.1 Fitting of the datum plane
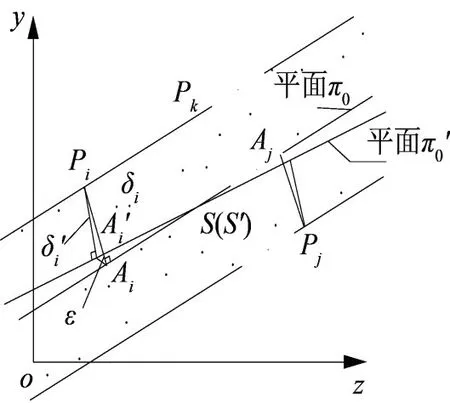
圖2 點集P與平面π0,π0′關系圖Fig.2 SetP&plane π0and π0′
3 算法論證
對于上述結論的“最小條件”符合性作簡要論證。如圖2,Ai,Ai′分別為Pi在π0,π0′的投影,在ΔPiAiAi′中∠PiAi′Ai為鈍角,因鈍角之對應邊必定小于任一鄰邊,故 Ai′Pi<AiPi;同樣,記 Aj,Aj′為 Pj在π0,π0′的投影,∠PjAj′Aj亦為鈍角,亦成立 Aj′Pj<AjPj。綜之有 Ai′Pi+Aj′Pj<AiPi+AjPj,即δ′< δ。這表明由于π0微小轉動得到π0′后,點集P對于π0′的平面度誤差降下來了,且是單調下降,這也說明此平面度誤差的計算過程是收斂的,不斷趨于“最小區域”。
本文取用了數十例平面度誤差算例對上述算法進行驗證,計算結果表明本文算法的精度均達到或超過原文,進一步證明本算法的“最小條件”符合性。現摘取4例列于表1予以說明。
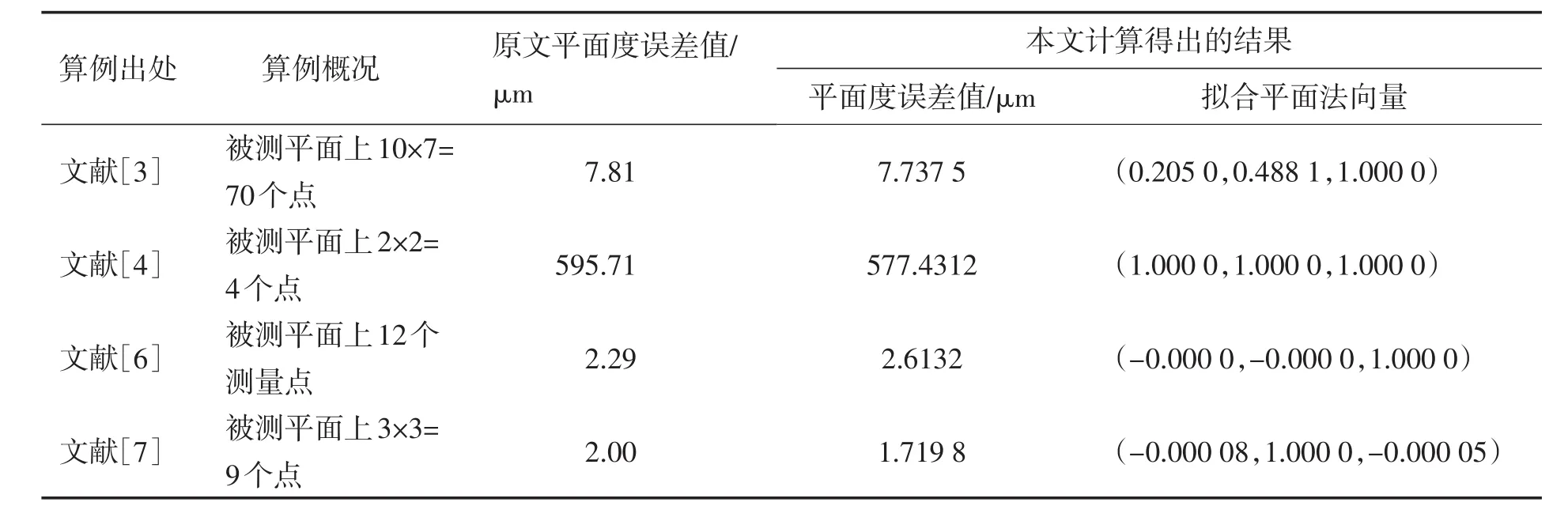
表1 平面擬合算例結果比較Tab.1 Result comparisons of flat-to-flat fitting calculation
4 垂直度評定
4.1 面對面垂直度誤差算法
上述獲得高精度的擬合基準平面為高精度評定面對面垂直度誤差打下好的基礎。對三維坐標系旋轉,使xoy面與基準平面重合,被測平面上測量點在基準平面的投影可視為二維平面點,記為Q={Qk(xk,yk),k=1~m},解讀文獻[1]之規定,顯然求垂直度誤差就可轉化成為求點集Q的二維直線度誤差。
設Q的基準直線為l0,與之平行的兩條直線為l1,l2,把Q夾緊在其間,并使得l1,l2間距 f達到最小,如圖3所示,f即為點集Q的二維直線度誤差,亦即面對面垂直度誤差值。
1)通過“最小二乘法”求得基準直線l0(設斜率為k0、截距為b0,方程:y=k0x+b0),此時的 f值為初始直線度誤差,f=f1+f2。
2)在此基礎上細微改變k0值,即對l0進行細微的轉動,目的是把 f值降下來。設點集Q中距l0的最大、最小值為 f1,f2,所對應的點分別為 Qi,Qj,Qi,Qj在 l0的投影點為 Qi′,Qj′,在 QiQi′方向上距 Qi′距離 ξ處取 Qi′點( ξ是很小值),同樣在 QjQj′方向上距 Qj′距離ξ處取 Qj′點,即 Qj′Qj′=Qi′Qi′= ξ。以 Qi′,Qj′作直線 l0′,易見 Qi到 l0′之距離小于Qi到 l0距離,Qj到 l0′之距離也小于Qj到 l0距離,這表明 l0′有可能把 f值降下來。
到底能否把 f降下來,該文是通過點集Q對于l0算出新的直線度 f′,與之′前的 f比較進行判斷:1)若 f′<f,l0取代 l0;
2)若 f′≥f,則縮小 ξ,以 ξ值重新求出直線l0′,再計算直線度 f′,觀察 f 值下降與否;
3)若ξ不斷縮小已能滿足精度要求,計算終止,最后得到的直線度誤差 f,即為垂直度誤差值。
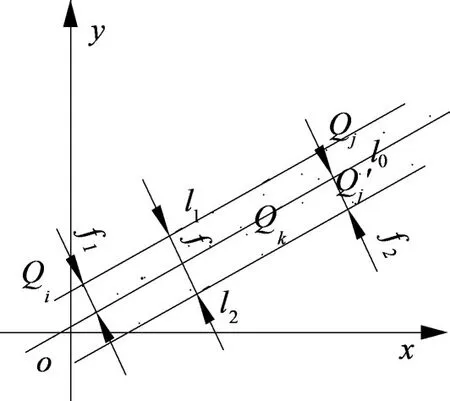
圖3 投影點集Q與基準l0示意圖Fig.3 Diagram of projection point set Q&l0benchmark
4.2 垂直度算法流程圖
按照上述的面對面垂直度誤差算法過程,依軟件開發要求作出算法流程圖如圖4所示。本算法程序用C語言編制。(程序代碼略)
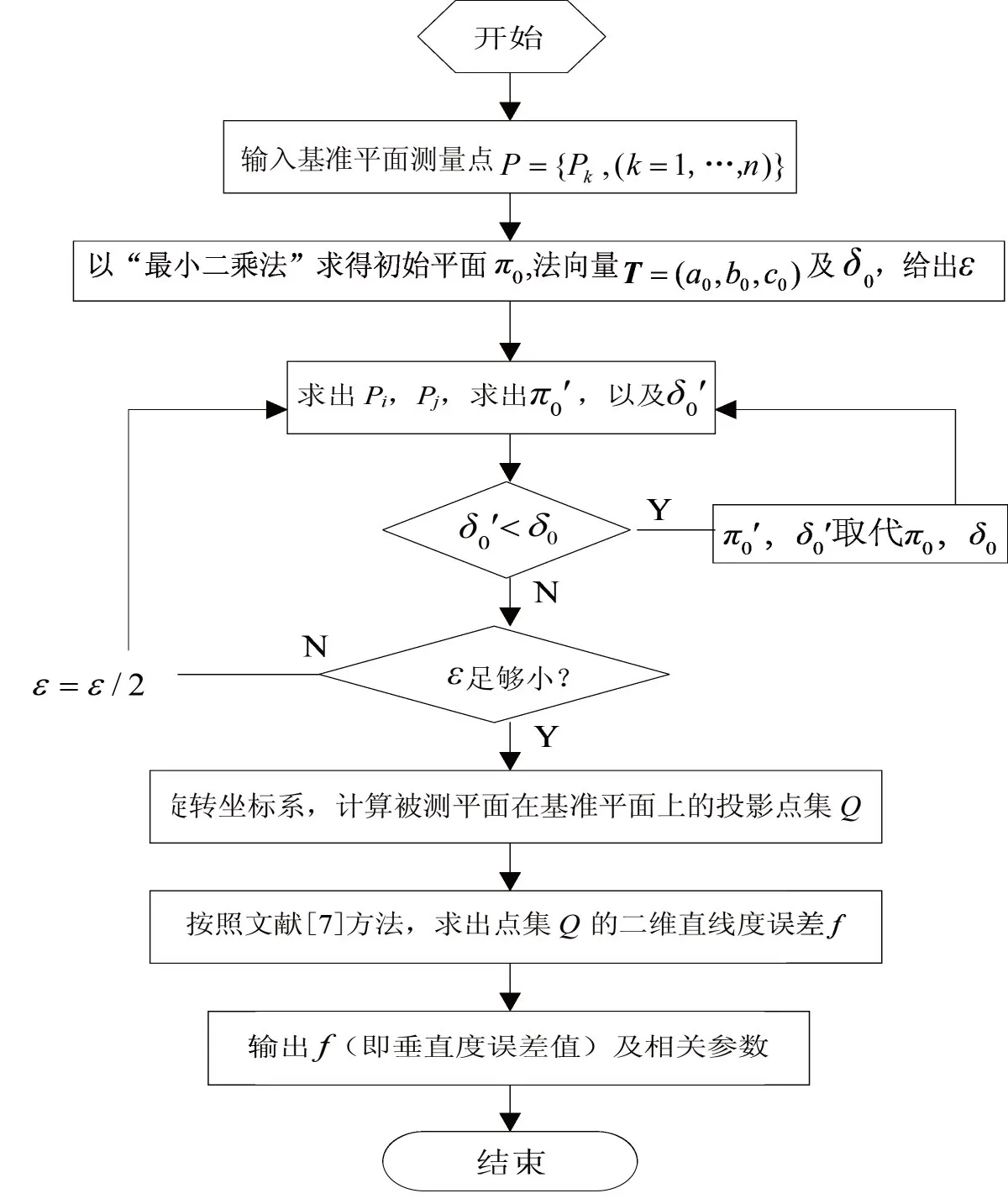
圖4 垂直度算法流程圖Fig.4 Diagram of perpendicularity algorithm
4.3 算例測試
選用3個典型算例對程序加以測試,并把比較結果列于表2,對本文算法與軟件的正確性可靠性略作說明。
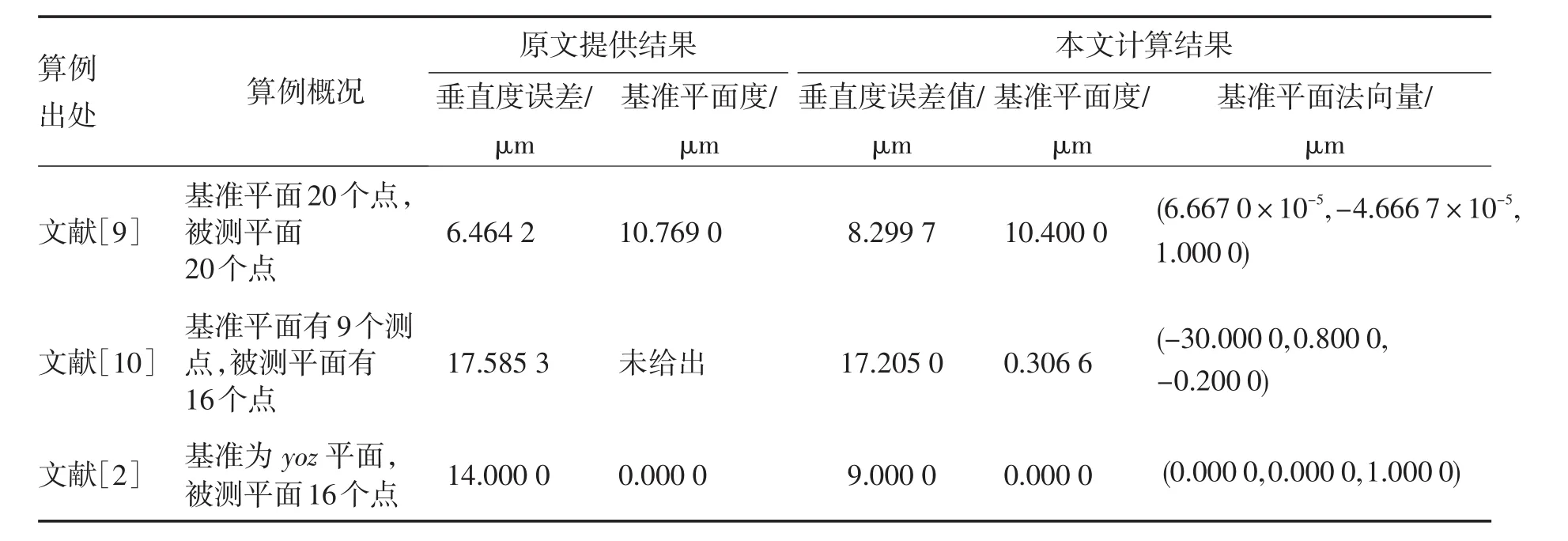
表2 面對面垂直度誤差算例計算結果比較Tab.2 Test calculation comparisons of flat-to-flat perpendicularity error
5 結束語
面對面垂直度誤差評定的關鍵在于基準平面的確定,核心問題是基準平面的平面度誤差計算,難點在于此計算必須符合“最小條件”。本文從國標規定出發,從理論上解決了平面度誤差的高精度計算問題,從而解決了擬合基準平面在“最小條件”方面的符合性;通過算例驗算與結果比較,表明此理論與算法都是正確可行的。在高精度基準的基礎上,引用文獻[7]所提供的成熟算法,求出高精度的面對面垂直度誤差,也就水到渠成了。
本文引用的算例有限,歡迎同行專家對拙作及相應軟件批評指正。
[1]中華人民共和國國家質量監督檢驗檢疫總局,中國國家標準化管理委員會.GB/T 1958-2004產品幾何量技術規范(GPS)形狀和位置公差檢測規定)[S].北京:中國標準出版社,2004.
[2]甘永立.形狀和位置誤差檢測[M].北京:國防工業出版社,1995:137.
[3]崔長彩,車仁生,羅小川,等.基于實數編碼遺傳算法的平面度評定[J].光學精密工程,2002,10(1):36-40.
[4]楊偉敏.PC_DMIS軟件平面度誤差評定方法研究[J].工業計量,2012,22(3):14-15.
[5]王少鋒,許玉德,周宇,等.基于臨界平面法的鋼軌裂紋萌生壽命預測模型研究[J].華東交通大學學報,2011,28(5):77-82.
[6]倪愛晶,鄭聯語.基于形狀誤差不確定度的大尺寸測量系統優化配置方法[J].計量學報,2011,32(4):289-295.
[7]王冉.零件尺寸在線檢測系統的開發及誤差計算方法研究[D].南京:南京航空航天大學,2000:57-58.
[8]林翔.直線度誤差的新算法及其在微機上的實現[J].計量技術,2007(8):19-21.
[9]劉平.用計算機評定平面對平面的垂直度誤差[J].宇航計測技術,1989(4):22-30.
[10]楊金霞.基于坐標測量數據的位置誤差評定軟件包的開發[D].西安:西安理工大學,2008:42-43.
