基于母線電壓動態變化的電動汽車永磁同步電機控制策略*
2012-08-28 06:50:52黃蘇融王維辰
電機與控制應用 2012年10期
黃蘇融, 王維辰, 王 爽, 史 岱
(上海大學機電工程與自動化學院,上海 200072)
0 引言
電動汽車電池的充放電過程會造成電機系統母線電壓幅值的動態變化。母線電壓對應的電機基速和轉折速度將電機運行區域分為恒轉矩區和恒功率區,并分別使用最大轉矩/電流比控制[1]和弱磁控制[2]。由于母線電壓變化引起電機的基速和轉折速度變化,可能導致電機系統失控或者無法獲得最優的能源利用率[3]。為提高母線電壓利用率和電機運行效率,并防止電機系統失控,開展基于母線電壓變化的控制策略研究具有顯著的應用價值。
文獻[4,7]提出了一種反電勢電壓限幅法,在母線電壓下降時,可防止電流調節器飽和,但只適用于恒功率運行區的弱磁控制,動態性能欠佳。文獻[5-6]以轉矩、轉速和電壓為依據,建立3維指令表,在防止電流調節器飽和的同時有效地提高電機運行效率。但該方法數據龐大,建表耗時,插值誤差大。針對這些不足,文獻[3]采用了電壓反饋調整指令法,建立2維指令表,將轉速、轉矩和母線電壓按一定的內在比例作為控制指令調整的依據,修正電流指令,消除母線電壓動態變化造成的影響,并應用于韓國“現代”YF Sonata混合動力汽車中。但是指令表各個比例系數依據不同的電機參數變化,不具備通用性。
本文在分析比較各種基于母線電壓變化控制策略的基礎上,提出“將實際母線電壓向額定母線電壓等效折合,同比調整作為查表依據的電角速度指令值”的方法,直接對控制指令進行實時調整,有效防止調節器失控并提高電機運行效率。仿真與試驗驗證了該方法的可行性。
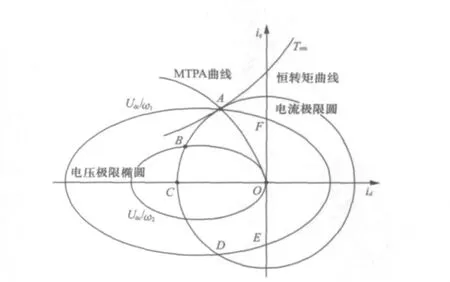
圖1 電機的基速、轉折速度和運行區域
1 IPM同步牽引電機定子電流最優控制
正弦穩態下電機定子電壓矢量us的幅值與電角速度ωe有關,即電角速度受到電壓極限值的制約。電機基速(第一轉折速度)ω1與第二轉折速度ω2表達式如式(1)、式(2)所示:
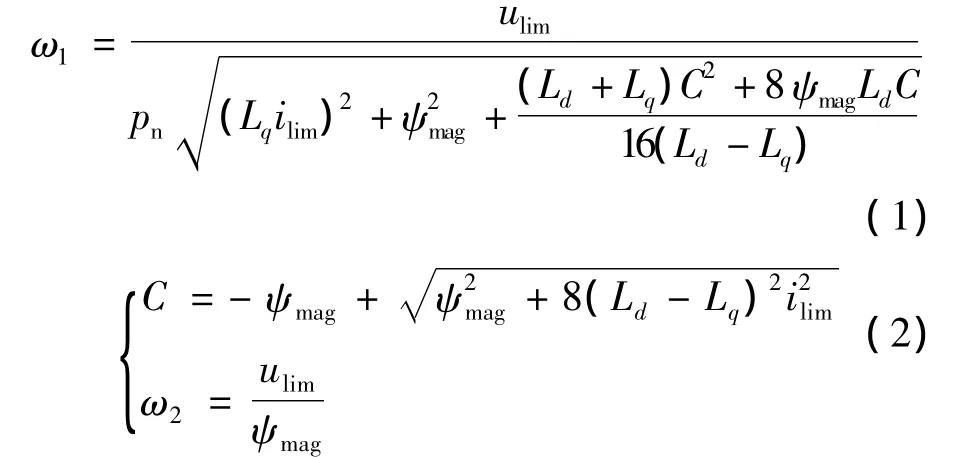
ud、uq——dq軸電壓;
id、iq——dq軸電流;
Ld、Lq——dq軸電感;
ψmag——永磁體磁鏈;
pn——電機的極對數。
如圖1所示,電流極限圓和最大轉矩/電流比軌跡交于A點,通過A點的電壓極限橢圓對應的電角速度為基速,而通過坐標原點的電壓極限橢圓對應的電角速度為第二轉折速度。
定子電流最優控制是根據不同的電機運行區域,選擇使用最大轉矩/電流比控制和弱磁控制的一種混合控制策略。電機基速將運行區域分為恒轉矩區和恒功率區,第二轉折速度將恒功率區分為弱磁A區及弱磁B區。如圖1所示,在恒轉矩區定子電流矢量軌跡始終不離開OA段,滿足最大轉矩/電流比的控制規律,使電氣損耗降到最小,電機系統效率最高,同時,系統對逆變器額定電流容量要求最低,指令表達式如式(3)和式(5)所示。在弱磁B區,為避免電流調節器飽和,使用弱磁控制,定子電流軌跡在OBC區域內,指令計算如式(4)和式(5)所示。弱磁A區,即OAB區域,根據負載要求使用最大轉矩/電流比控制或者弱磁控制。
2 傳統電流指令查表法
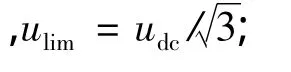
傳統的定子電流最優控制方法利用式(1)~式(5)建立控制指令表,將母線電壓視為常值,由電機的電角速度決定控制區域。實時控制中使用電角速度ωe,轉矩指令Tem進行2維查表,得到電流控制指令。查表方式如圖2所示。
傳統的控制方法如圖3所示,當母線電壓升高(Udc1→Udc2),A1點和B1點不能提高母線電壓的利用率,導致電機運行效率下降。反之,當母線電壓下降(Udc2→Udc1),電機無法運行在A2點和B2點,電流調節器飽和并失去對定子電流的控制能力。這是傳統控制方法沒有考慮母線電壓變化造成的弊端。
3 考慮母線電壓變化的定子電流最優控制策略
針對傳統控制方法的不足,本文基于母線電壓變化的控制策略,提出“將實際母線電壓向額定母線電壓等效折合,同比調整作為查表依據的電角速度指令值”的改進方法,在查表法中植入母線電壓值,根據母線電壓的變化及時調整電角速度基值和控制指令值。改進后的查表方式如圖4所示。
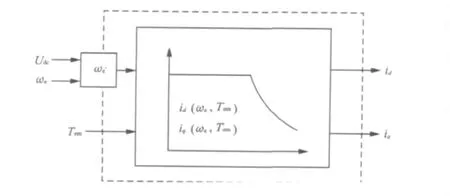
圖4 改進控制方法的電流查表方式
當電角速度小于ω1,運行于基速區,采用轉矩指令進行一維查表;電角速度大于ω1,則運行于恒功率區。
電機在恒功率區運行受電角速度和母線電壓共同制約。根據電壓橢圓公式(7),在任一狀態下,ulim/ωe比值確定唯一的電壓橢圓。

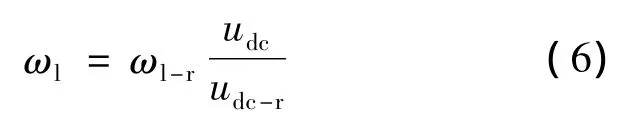
以額定的母線電壓udc-r及其額定的基速ω1-r建立控制指令表。當母線電壓udc變化,所對應的實際基速ω1如式(6)所示:
保持電壓橢圓不變,依據折合理論[7],將實際的母線電壓向額定的母線電壓折合,計算折合后的電角速度,如式(8)所示:

式中:udc——實際母線電壓;
ωe——實際電角速度;
udc-r——額定母線電壓;
ω'e——等效折合后的電角速度。
ω'e作為在額定母線電壓計算體系恒功率區的查表依據,與轉矩指令Tem共同進行二維查表得到恒功率區對應的電流指令值。
改進后的基于母線電壓變化的控制方法如圖5所示。當母線電壓上升,控制指令從A1點和B1點向A2點和B2點轉移,減小弱磁程度,提高母線電壓利用率和電機效率。反之,電壓下降,控制指令由A2點和B2點轉向A1點和B1點,防止電流調節器的飽和與失控。
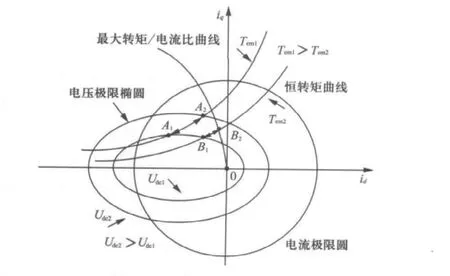
圖5 改進的控制方法
4 仿真及試驗驗證
本節首先采用仿真分析方法比較未考慮母線電壓變化的傳統控制方法和基于母線電壓變化的改進控制方法在電壓下降時的電流特性和轉速轉矩特性。通過仿真試驗方法,比較兩種控制方法在電壓上升時的機械特性與效率特性。
電機的參數值如表1所示。
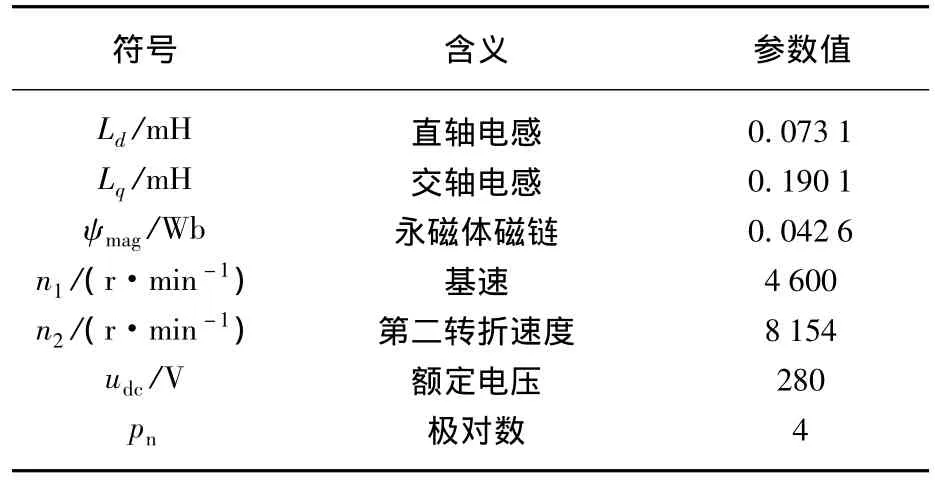
表1 電機參數值
4.1 仿真分析
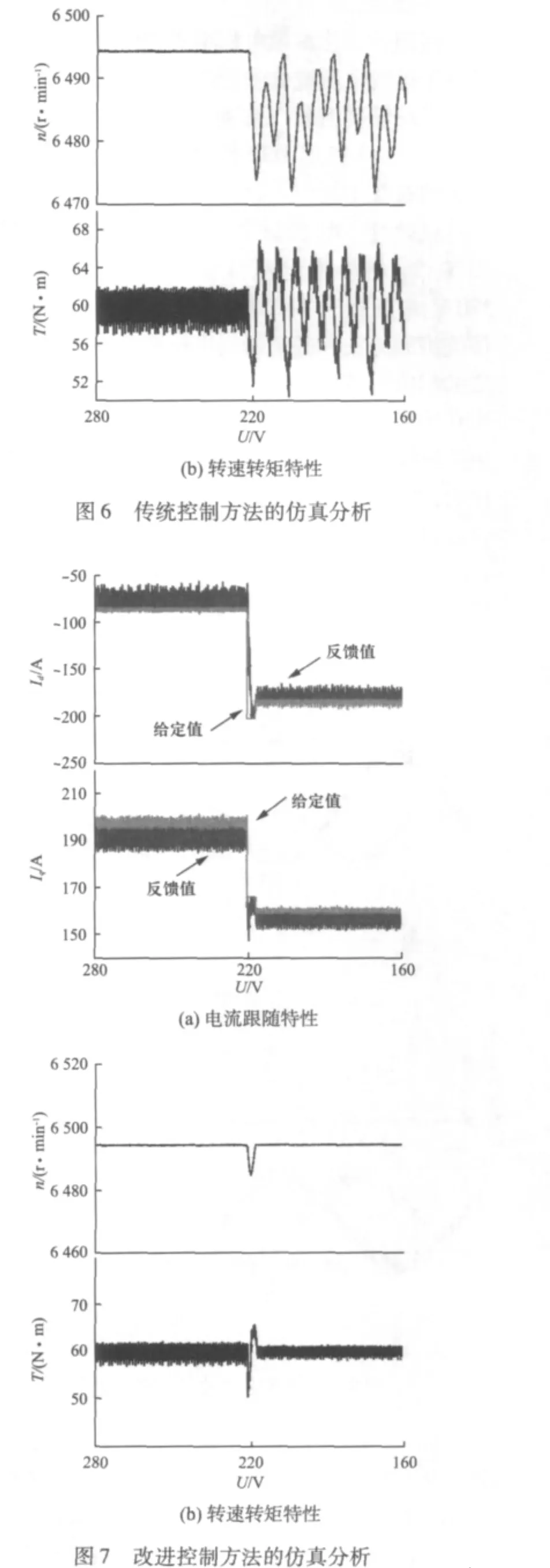
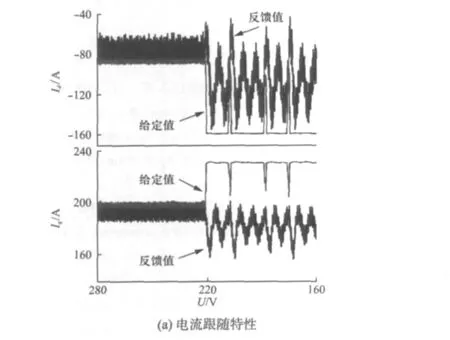
圖6和圖7為電機運行于恒功率區,轉速6 500 r/min、負載轉矩 60 N·m,母線電壓從280 V突降至220 V的仿真結果。
圖6為采用未考慮母線電壓變化的傳統控制方法的仿真結果。當電壓突降后,dq軸電流調節器飽和并產生振蕩,失去對定子電流的控制能力,導致轉速和轉矩持續振蕩。
圖7為采用基于母線電壓變化的改進控制方法的仿真結果。當電壓突降后,控制指令及時調整,dq軸電流調節器快速跟蹤電流給定值,轉速和轉矩無持續振蕩,滿足運行要求。
4.2 試驗結果
使用數字化虛擬電機半實物仿真試驗平臺進行基于母線電壓變化的控制方法的試驗驗證。該平臺以現場可編程門陣列(FPGA)構造電機和逆變器模型,并使用DSP作為控制器,是驗證控制算法的有效工具[8]。
試驗中,電機轉速6 500 r/min,負載轉矩70 N·m,將母線電壓從額定的280 V提高至320 V,電壓提升14.28%。圖8和圖9分別顯示傳統控制方法和基于母線電壓變化的改進控制方法的相電流波形,示波器橫軸為0.5 ms/div,縱軸為0.5 V/div,相電流信號的變比為311 A/V;其中傳統控制方法的相電流有效值為163.58 A,改進后的控制方法的相電流有效值為153.41 A。由此可見,采用改進的控制方法后,當電壓提升14.28%時,相電流降低6.22%,電機銅耗下降12.05%。進的控制方法拓寬了恒轉矩區域的范圍。在恒功率運行區,有效地降低電流幅值,從而降低銅耗,整個弱磁區間效率提升1.5% ~4.3%不等。
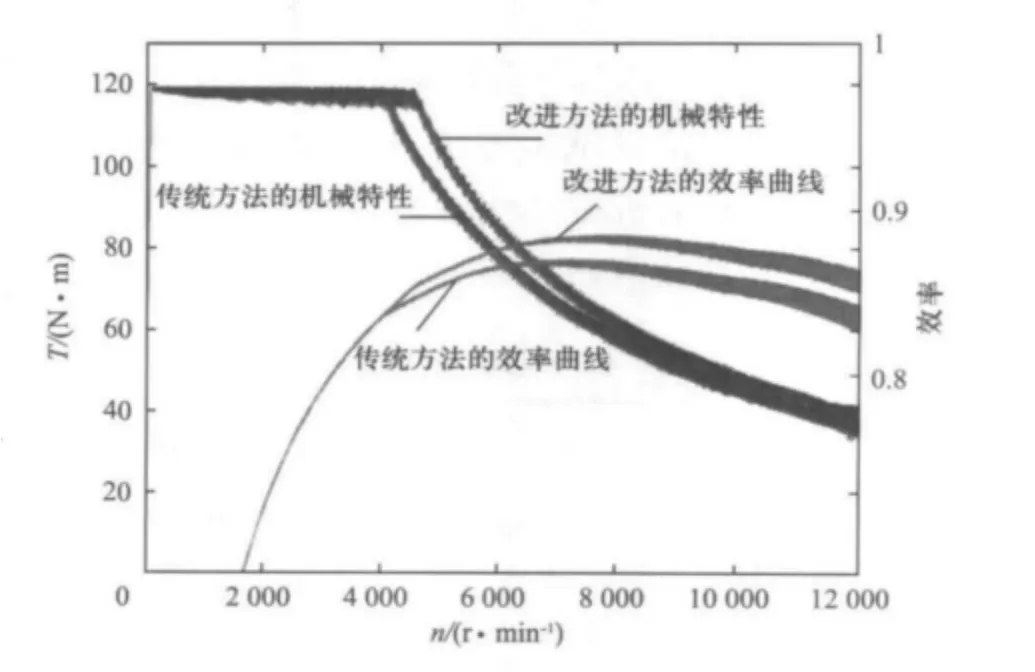
圖10 傳統方法和改進方法的機械特性及效率曲線比較
5 結語
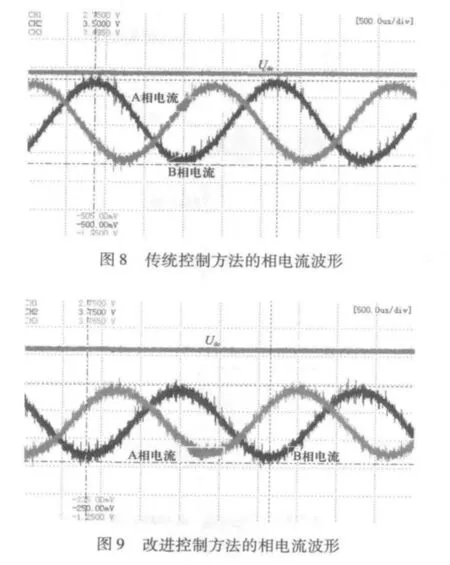
圖10是母線電壓升高至320 V的情況下分別采用傳統控制方法和基于母線電壓變化的改進控制方法得到的機械特性曲線和效率曲線。由圖10可見,當母線電壓升高至320 V后,采用改
采用未考慮母線電壓變化的傳統控制方法在母線電壓上升時,不能提高母線電壓利用率和電機效率;在母線電壓下降時,電流調節器會產生飽和,系統失去對定子電流的控制能力。
本文在分析比較各種基于母線電壓變化控制策略的基礎上,提出“將實際母線電壓向額定母線電壓等效折合,同比調整作為查表依據的電角速度指令值”的改進方法,直接對控制指令進行修正。該方法概念清晰,實施方便,通用性強。
通過仿真試驗驗證,改進的方法在母線電壓上升時,有效提高母線電壓利用率及系統運行效率;在母線電壓下降時,避免了電流調節器的飽和與失控現象。
[1]CONSOLI A,SCARCELLA G,SCELBA G,et al.Steady-state and transient operation of IPMSMs under maximum-torque-per-ampere control[J]. IEEE Transactions on Industry Applications,2010,46(1):121-129.
[2]YANG J Y,MA Q,DENG Y,et al.Flux-weakening capability of flux-switching permanent magnet motor[C]∥International Conference on E-Product EService and E-Entertainment(ICEEE),2010:1-4.
[3]KIM B,KWAK M,CHUNG T,et al.A method for improving HEV motor system efficiency considering battery voltage variation[C]∥IEEE 8th International Conference on Power Electronics and ECCE Asia(ICPE & ECCE),2011:677-682.
[4]KIM J M,SUL S K.Speed control of interior permanent magnet synchronous motor drive for the flux weakening operation[J].IEEE Trans Ind Applicat,1997(33):43-48.
[5]KWON T S,CHOI G Y,KWAK M S,et al.Novel flux-weakening control of an IPMSM for quasi-six-step operation[J].IEEE Trans Ind Applicat,2008,44(6):1722-1731.
[6]LEE J H,LEE J H,PARK J H,et al.Fieldweakening strategy in condition of DC-link voltage variation using on electric vehicle of IPMSM[C]∥IEEE International Conference on Electrical Machines and Systems(ICEMS),2011:1-6.
[7]李發海,王巖.電機與拖動基礎[M].北京:清華大學出版社,2005.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
兒童故事畫報(2019年5期)2019-05-26 14:26:14
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
西安航空學院學報(2014年5期)2014-07-13 01:27:52
