基于Pisarenko 譜估計的GPS 多普勒頻偏快速捕獲
2012-08-29 06:35:40楊曉波
科技視界 2012年20期
關鍵詞:信號
楊曉波
(石家莊職業技術學院電子工程系 河北 石家莊 050081)
0 引言
提高GPS 接收機多普勒頻移的捕獲時間指標具有重要的實際意義[1].GPS 接收機偽碼的捕獲是載波多普勒和碼相位的二維搜索,如圖1 所示.
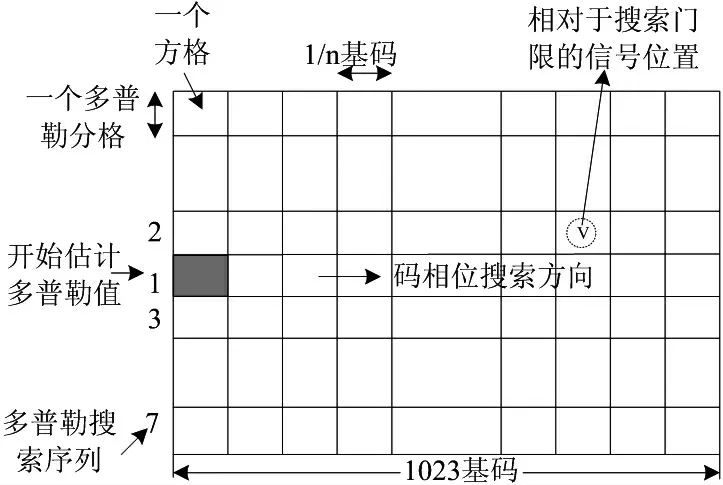
圖1 偽碼相位和載波多普勒二維搜索
多普勒搜索步長一般取2/3T[2],T 為積分時間,所以一般多普勒頻偏得估計精度為幾百赫茲, 這對于PLL 來講過于粗糙,并且PLL 對動態非常敏感,所以一般接收機先由FLL 將多普勒頻差估計到一個比較小的范圍, 然后再切換到PLL 進入跟蹤狀態, 這樣就在多普勒的捕獲時間中增加了FLL 的收斂時間,同時捕獲虛警后的滯留時間也會加大,對此文獻[3]提出對解擴后的信號利用FFT 來估計載波多普勒,由于FFT 頻率分辨率受到信號長度的限制,該方法也不能取得很好的效果.例如, 在5MHz 的采樣率下要達到100Hz 的分辨率就需要10ms 數據,50000 個采樣點,這樣不但增加了捕獲時間同時還增大了計算量和存儲空間.文獻[4]提出了將多普勒搜索單元設窄一些,如250Hz、125Hz 提高多普勒頻率估計的分辨率.但該方法會加大搜索空間,非常耗時.本文在研究解擴后GPS 信號特點的基礎上提出利用Pisarenko 譜估計的方法利用很少的數據來精確估計多普勒以減少載波多普勒的平均捕獲時間.
1 FFT 快速捕獲原理與多普勒平均捕獲時間
1.1 多普勒FFT 快速捕獲原理
圖1 為PN 碼FFT 快捕的中頻數字化結構, 由數字下變頻、FFT 相關、檢測判決、解調、FLL 環路、符號時鐘恢復與保護等幾部分組成. 其中FLL 環路的工作流程是從接收數據流中提取頻偏估計值, 經環路濾波后去控制本地NCO 的頻率,使其跟蹤輸入中頻信號的頻率變化, 從而使下變頻的輸出始終為零中頻數字基帶信號.
接收機接收到的信號模型為:

其中M:可見衛星個數;Di:電文;Pi:偽隨機碼;ωi:GPS 信號載波頻率加多普勒頻率;τi:信號延遲;φi:載波初始相位;n(t):雙邊功率譜密度為N0/2 加性高斯白噪聲.

圖2 多普勒頻偏FFT 快捕的中頻數字化結構
FFT 相關器同相、正交輸出:

其中,ε 為接收的偽隨機碼與本地偽隨機碼未完全對齊的基碼數,ωd為載波的多普勒頻移,T 為相關積分時間,φ 為相位差,nI和nQ是相互獨立的基帶高斯白噪聲,相關輸出后計算同相、正交包絡:

一個頻點上包絡的最大值與恒虛警門限比較如果包絡大于門限,認為捕獲成功,在沒有信號時,包絡是服從瑞利分布的隨機過程[2],經本文研究FFT 快捕恒虛警門限為:

其中,n 為FFT 點數,σ 為1-sigma 噪聲功率, 但對于多普勒來講這只是實現了粗捕, 然后將粗捕后的多普勒傳遞給FLL, 經過一定時間后環路鎖定則系統轉入頻率跟蹤狀態,即捕獲成功,否則將重新回到粗略估計狀態.
1.2 多普勒頻偏平均捕獲時間
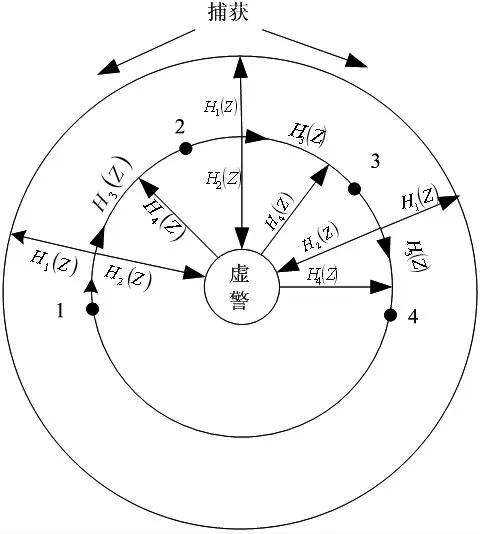
圖3 多普勒頻偏捕獲狀態轉移圖
根據以上分析可知,多普勒頻移捕獲算法分為兩個步驟:粗略估計和捕獲驗證.首先,把接收機的頻域搜索范圍劃分為若干相等的頻率區間,各區間的中心頻率點設為fn.粗略估計就是對頻點fn上的最大相關值與門限比較, 如果大于門限則將NCO 固定在此頻率點上.系統隨即進入捕獲驗證狀態,FLL環路對殘留頻偏進行捕獲,若經過時間Ts(FLL 收斂時間)后環路鎖定(殘留頻偏小于某個規定值),則系統轉入頻率跟蹤狀態(即捕獲成功),否則將重新回到粗略估計狀態.
所以多普勒頻移的捕獲過程具有馬爾科夫性, 圖3 中狀態n(1,2,3,…)對應系統的粗略估計狀態,另外兩種情況分別是捕獲狀態和虛警狀態,捕獲狀態是馬爾科夫過程的穩態,設系統初始時刻處于狀態1, 經FFT 快捕后判斷進入其它狀態的轉移路徑:a.進入捕獲狀態;b.進入狀態2,即系統沒有滿足判決條件仍處于粗捕狀態;c.進入虛警狀態,經驗證后再回到粗捕狀態如此循環,直到系統進入捕獲狀態,該過程轉移圖中各支路的增益表達式:

其中G 是頻率單元數,Tc是一個頻點的駐留時間,Ts是虛警滯留時間,于是得到多普勒平均捕獲時間的生成函數:

式中PD,PFA,PM分別表示多普勒頻移捕獲的檢測概率、虛警概率和漏檢概率,由于PD+PFA+PM=1,H1(1)=PD,H2(1)=PFA,H3(1)=PM,H4(1)=1 平均捕獲時間計算得:

其中G 為頻點的個數,Ts是虛警滯留時間,也是多普勒虛警驗證時間,對于有FLL 輔助的環路,就是FLL 的收斂時間,如果能夠將這個時間縮短,將縮短多普勒的平均捕獲時間.
2 Pisarenko 估計多普勒頻偏具體算法
由式(1)如果第j 個信號被捕獲,則解擴后的信號模型為:
dsj(t)=Dj(t-τj)sin(ωjt+φj)

式(9)等號右邊第二項中Rij為第j 個偽隨機碼和第i 個偽隨機碼的互相關, 研究表明互相關部分最大可能功率為-21dB[5],第三項為偽隨機碼和加性白噪聲的相關.這兩部分可以看作高斯白噪聲, 第一項為載波部分, 其中載波相位φj是[-π,π ]之間均勻分布的隨機數.所以,解擴后的信號可以認為是平穩諧波過程與高斯白噪聲的和,這樣的觀測信號,可以利用Pisarenko 譜估計對載波的多普勒頻率進行高分辨率的估計[6]. Pisarenko 譜估計由于使用了奇異值分解和總體最小二乘方法,整個計算具有好的數值穩定性,而且AR 階數和參數估計具有非常高的精確度[7].所以本文采用這種方法估計載波多普勒.
當諧波信號在加性白噪聲中被觀測時, 它的AR 參數和MA 參數完全相同一個特殊的隨機過程, 這一特殊的ARMA過程所服從的法方程為:

與修正的Yule-Walker 方程類似, 該方程可以構造超定的方程組,并使用SVD-TLS[6]算法求解.
具體算法:
步驟1 利用觀測數據的樣本自相關函數估計R?y(k)構造法方程的擴展階自相關矩陣
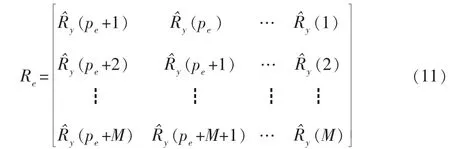
式中pe>2p,并且M>p;
步驟2 將矩陣Re當作增廣矩陣,利用算法SVD-TLS 確定AR 的階數2p 和系數向量a 的總體最小二乘估計;
步驟3 計算特征多項式

步驟4 利用

計算載波的頻率.
3 計算機仿真及分析
3.1 載波多普勒估計精度
載波頻率為1.25MHz,多普勒頻率設為300Hz,采樣頻率5MHz,若多普勒搜索步長為500Hz 則粗捕后多普勒最大誤差250Hz,通過一個以捕獲頻率為中心頻率帶寬1K 的帶通濾波器,此時擴頻增益為33dB,考慮實際的較弱GPS 信號信噪比-20dB,解擴后信噪比為13dB,仿真利用1ms 數據.
由于估計的諧波頻率只有1 個,所以式(10)中p=1,取M=12,pe=10,當然也可以取其它值,只要滿足擴展階自相關矩陣的要求即可.圖5 為信噪比13dB 時20 次仿真的譜估計圖,圖中實線為估計諧波功率譜密度,虛線所示為真實頻率,可以看出每次的估計結果非常穩定.
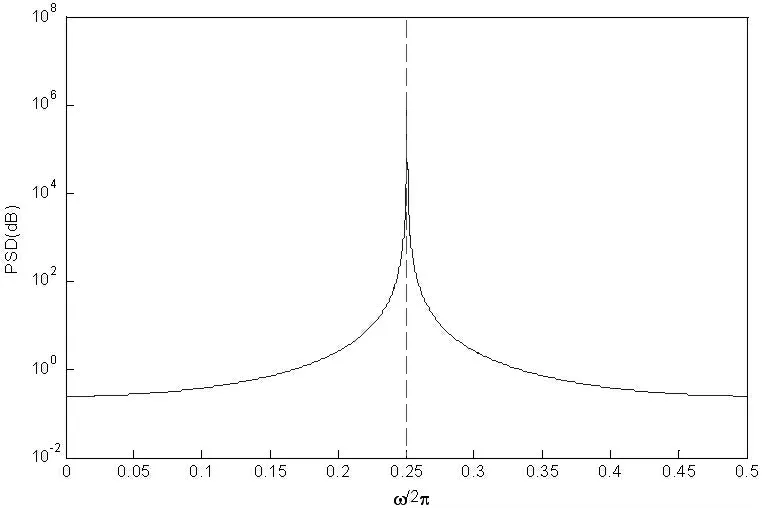
圖4 本文方法估計載波多普勒
同時本文應用三級最小二乘ARMA 參數模型法和FFT估計載波多普勒, 數據長度1ms, 其它條件相同, 下表是Pisarenko、ARMA 參數模型法及FFT 三種估計方法的對比,表1 為仿真進行50 次的頻率均方誤差(RMS),由于FFT 的頻率分辨率對于1ms 的數據長度為1kHz, 其輸出頻率為1kHz 的整數倍,所以其誤差不隨信噪比變化.

表1 1ms 數據頻率估計RMS(Hz)
考慮偽碼未對齊情況. 碼片誤差最差情況0.5 個碼片,如圖5 所示,圖中實線表示本地碼和接收信號偽碼對其情況,虛線為差0.5 碼片的相關輸出,輸出功率降低6dB,所以會造成估計精度降低.表2 為仿真進行50 次的頻率均方誤差(RMS).
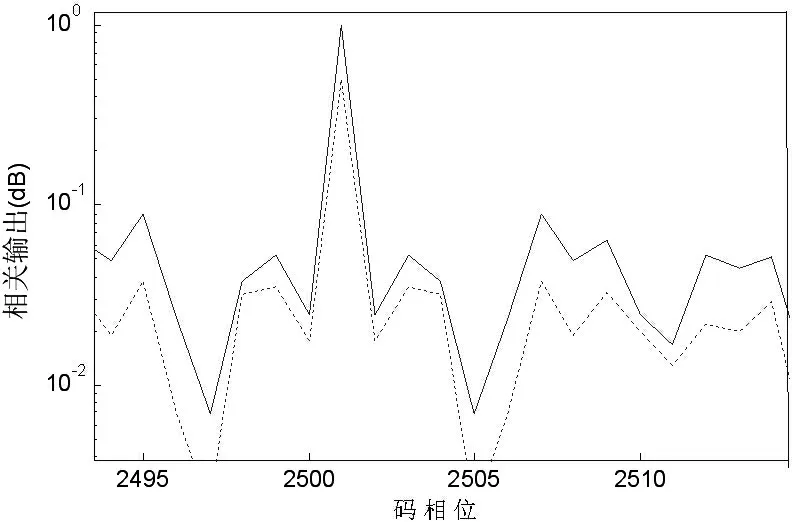
圖5 本地碼和接收碼未對齊對相關輸出峰值功率的影響
從表1, 表2 可以看出Pisarenko 的多普勒估計精度比ARMA 及FFT 高,雖然其估計誤差受信噪比的影響,但是在考慮低信噪比GPS 信號情況下,其估計誤差完全能夠滿足實際情況.

表2 1ms 數據考慮碼片未對齊情況頻率估計RMS(Hz)
3.2 運算量的研究及對平均多普勒捕獲時間的對比
仿真條件: 估計的多普勒范圍為±10kHz, 多普勒步長500Hz,多普勒粗捕誤差250 為Hz,則頻率單元為21 個,積分時間為1ms,在MATLAB 仿真環境下,進行100 次仿真,FLL 平均需50ms 達到穩定(頻率誤差達到20Hz 內),每次需要40 e6次浮點運算, 而本文采用的頻譜估計方法要20 e6 次浮點運算,是FLL 收斂時間的一半.
由式(8),若Gc=21,PFA=0.01,PD=0.95,Tc=0.001 情況下,若Ts=0.05 得平均捕獲時間0.0616s, 若Ts=0.025 得平均捕獲時間0.0363s,可以減少42%的時間,可見,采用高分辨率的載波多普勒估計替代FLL 對多普勒剩余殘差估計可以大大減少從捕獲到跟蹤的時間.
4 結論
以上研究表明,對于解擴后的GPS 信號,視為平穩隨機過程和高斯白噪聲的和, 通過諧波恢復Pisarenko 譜估計法,對GPS 多普勒進行高分辨率估計是完全可行的, 可以取得非常好的的精度,以及穩定的結果,而且計算量也相對FLL 對多普勒剩余殘差估計小得多,可以減少40%左右的GPS 接收機從捕獲到跟蹤的時間。S
[1]黃振,陸建華,楊士中.衛星通信中多普勒頻移的快速捕獲[J].電子學報,2003,31(7)1052-1056.
[2]Kaplan,E.,Understanding GPS:Principles and Applications,Artech House,1996.
[3]Tsui,J.,Fundamentals of Global Positioning System Receivers: A Software Approach, Wiley Inter-Science,2000.
[4]Lin,D.,Tsui,J.,”Comparison of Acquisition Methods for Software GPS Receiver”. Proceedings of ION, pp.2385-2391, September 2000.
[5]Parkinson,B., et al.(editors),Global Positioning System. Volume 1.American Institute of Astronautics and Aeronautics, 1996.
[6]張賢達.現代信號處理[M].2 版.北京:清華大學出版社,2003.
[7]Zhang X D .Estimation of frequencies of sinusoids in colored ARMA noise via singular value decomposition.Proc.IEEE ISCAS’89,Portland,OH.1989:1315-1318.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06