PMSM控制器參數自整定研究*
2012-09-12 07:46:16牛永嶺皮佑國
組合機床與自動化加工技術 2012年2期
關鍵詞:方法
牛永嶺,皮佑國
(華南理工大學自動化科學與工程學院,廣州 510640)
PMSM控制器參數自整定研究*
牛永嶺,皮佑國
(華南理工大學自動化科學與工程學院,廣州 510640)
文章研究永磁同步電動機(Permanent Magnet Synchronous Motor,PMSM)轉速電流雙閉環控制系統控制器參數的自整定方法。電流環根據辨識得到對象參數按照工程設計方法進行整定。速度環采用模糊自整定的方法。根據速度響應的超調量和調節時間,經模糊化、模糊推理和清晰化得到控制器參數調整量,從而改變速度控制器參數,直到滿足指標要求,最后將參數固定。實驗表明,該方法改善了速度響應性能,實現了永磁同步電機安裝后伺服驅動控制器參數的快速自整定。
PMSM;工程設計;模糊自整定;PID控制器
0 引言
永磁同步電機具有體積小、效率高、調速性能好的優點,由其組成的交流伺服系統在數控領域得到了日益廣泛的應用[1]。PMSM一般采用轉速-電流雙閉環控制。由于PID控制器結構簡單、魯棒性好,控制器一般采用PID控制器。
PMSM型號多種多樣,電機所連接的負載的類型和大小也不盡相同。電機新安裝或負載變化后,必須對PID控制器的參數進行調整。人工調整PID參數需要根據經驗,費時費力。Ziegler和 Nichols[3]提出根據對象階躍響應,按照經驗公式整定,計算簡單但參數仍需調整。文獻[4]介紹了由莊敏霞和Atherton提出的最優整定方法。文獻[5]提出遺傳算法PID整定方法,將遺傳算法的并行運算和自適應的特點應用到PID整定中。文獻[6]將模糊推理方法與PID相結合,根據誤差及誤差變化在線調整PID參數。在電機和負載確定后,對象參數基本保持不變,而且DSP運算能力有限,同時為了保證多軸聯動時速度響應的同步性,不宜采用復雜的在線整定方法整定PID控制器參數。
本文研究PMSM控制器參數的離線整定即電機在機械設備上安裝后的驅動系統控制器的參數自整定。首先根據辨識電流環對象參數和電機參數按工程設計方法整定電流控制器和速度控制器參數。由于工程設計方法得到的速度響應超調大、調節時間較長,設計速度控制器參數模糊整定。以速度階躍響應的超調量和調節時間為輸入,根據PI參數對系統響應的影響及人工調整經驗制定模糊規則表,經模糊化、模糊推理和清晰化得到控制器參數的調整量,離線調整控制器參數,直至滿足指標結束整定。
1 控制器參數的工程設計方法
永磁同步電機本身是一個高階、非線性、多變量、強耦合的對象,采用矢量控制id=0控制策略在dq坐標系下電機的數學模型等效為他勵直流電機模型。雙閉環調速系統的工程設計方法經過合理的簡化處理,將系統近似為低階系統。根據典型I型和典型II型系統參數與性能指標之間的關系確定控制器參數。整定過程中,先設計電流控制器,然后把整個電流環作為轉速環的一個環節,再設計轉速控制器。
1.1 電流控制器參數整定
電流環作為系統的內環,其主要作用是跟隨電流指令變化,應將電流環設計成I型系統。經過簡化與近似后電流環模型如圖1所示,電流控制器采用PI控制器。其中,β為電流反饋系數,KPWM為逆變器放大倍數,R為電樞電阻,Tl為電氣時間參數,T∑i為電流環小慣性群時間常數,ki和τi分別為電流控制器比例系數和積分時間常數。其中T∑i=TPWM+Toi,TPWM為逆變器慣性時間參數,Toi為電流濾波時間常數。

圖1 PMSM電流環模型
在電流環對象參數辨識中,取Toi=0,TPWM取逆變器開關周期的一半,遠小于Tl,電流環對象可近似為一慣性環節。設置電角度為一固定值,電機不轉排除了反電勢的影響。實驗中通過vq-iq響應曲線得到電流環對象比例KI=βKPWM/R,慣性時間常數TI=Tl。
為將電流環設計成I型系統[7],應將對象中大的時間常數Tl與控制器零點抵消掉,即:

根據I型系統動態性能指標,兼顧電流超調量和調節時間,取:

1.2 速度控制器參數整定
為了轉速無靜差,抑制負載擾動和速度波動,速度控制器采用PI控制器,將速度環整定成典型Ⅱ型系統。PMSM速度環控制系統框圖如圖2所示,圖中把電流環簡化為一階慣性環節并與轉速環濾波合并等效為速度小慣性環節。其中,kn和τn分別為速度PI控制器增益和積分時間常數,T∑n為速度小慣性時間常數,J為電機轉動慣量,α為轉速反饋常數,KT為轉矩系數。
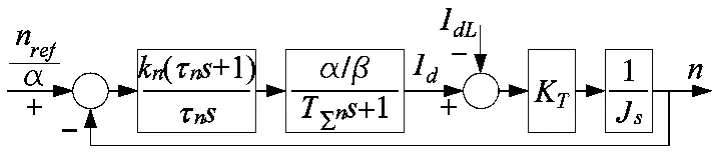
圖2 PMSM速度環模型
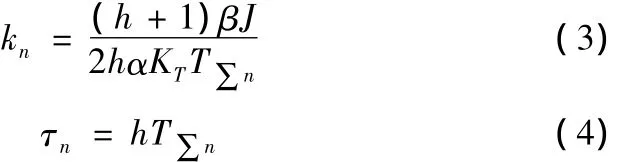
根據典型Ⅱ型系統參數和系統性能指標的關系,選取中頻寬h=5:
此時按線性系統計算有轉速超調σn=37.6%,調節時間ts=9.55T∑n。雖然考慮控制器飽和,超調有所下降,但仍難以滿足要求,必須對轉速控制器參數進行調節。
2 速度控制器參數模糊自整定
在電機或負載變更后,經過工程設計方法得到控制器參數不能滿足要求。為了保證系統速度響應性能,必須對速度控制器參數進行調整。速度控制器參數模糊自整定框圖如圖3所示。根據速度階躍響應曲線得到超調量和調節時間,經模糊化接口進入模糊推理。模糊推理采用Mandani模型,根據建立的模糊規則得到推理結果。最后經過清晰化得到PI參數調整量的精確值,進而改變速度PI控制器參數。
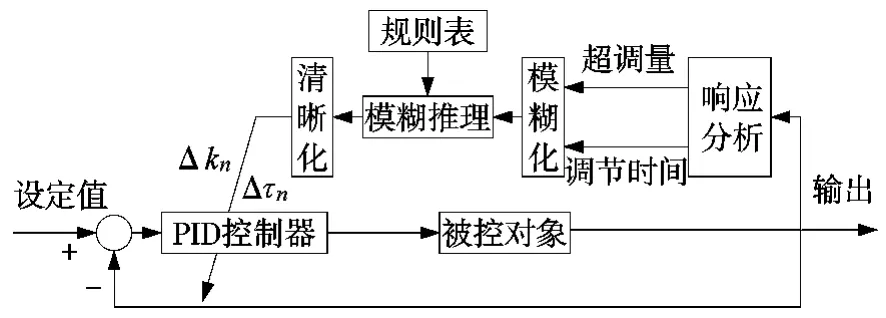
圖3 速度控制器參數模糊自整定框圖
2.1 隸屬度函數
選擇系統階躍響應的超調量σ和調節時間ts作為模糊運算的輸入量,PI控制器參數kn、τn的調整量Δkn、Δτn為輸出量。由于超調量和調節時間的非負性,輸入模糊集和論域是非對稱的。超調量σ的論域為:{0,5%,10%,15%},其模糊集為:{PZ,PS,PM,PB};調節時間ts的論域為:{0s,0.25s,0.375s,0.5s},其模糊子集為:{PZ,PS,PM,PB};Δkn的論域為:{-2,-1,-0.5,0,0.5,1,2},其模糊子集為:{NB,NM,NS,ZO,PS,PM,PB};Δτn的論域為:{-0.01s,-0.006s,0.002s,0,0.002s,0.006s,0.01s},其模糊子集為:{NB,NM,NS,ZO,PS,PM,PB}。考慮DSP的計算能力,各模糊子集的隸屬度函數曲線選用形式簡單、計算效率高的三角形和梯形形狀。σ、ts、Δkn和Δτn的隸屬度函數分別如圖4中a、b、c和d所示。
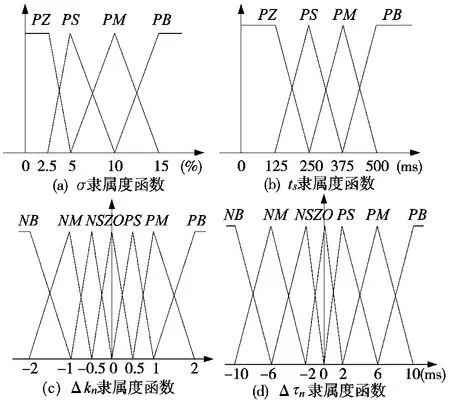
圖4 隸屬度函數
2.2 模糊控制規則
模糊規則蘊含人工調整PI參數的經驗,是整個參數模糊整定的核心。本文根據速度環增益和積分時間常數的作用及人工調整積累的經驗制定模糊控制規則。制定規則的原則是:比例系數占主導作用,積分時間常數配合使用;優先按照減小調節時間方向調整。Δkn和Δτn的控制規則表如表1所示。
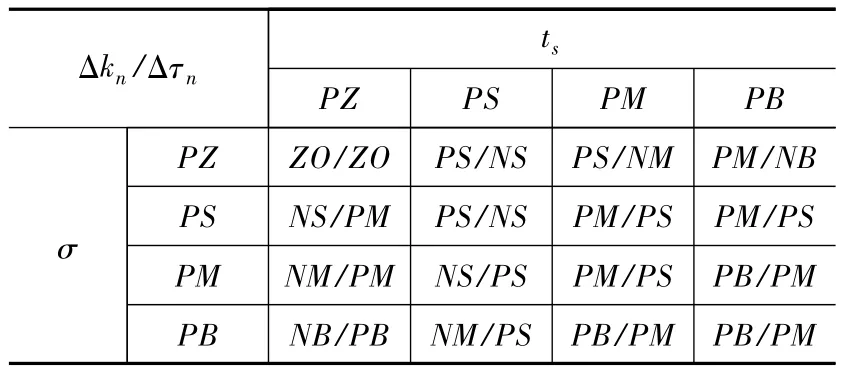
表1 模糊規則表
2.3 清晰化
由模糊推理得到的是一個模糊集合,不能直接用來調整PI控制器的參數,必須經過清晰化處理得到一個精確的量。清晰化的方法很多,這里采用工業控制中廣范使用的加權平均法,其計算公式為:
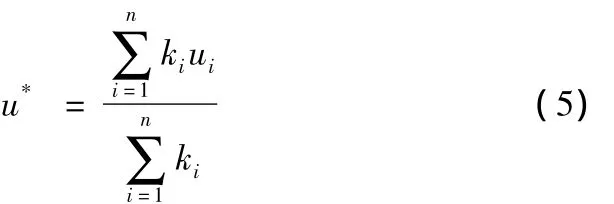
其中,ki由規則的前件和輸入的模糊集按一定的法則確定的值,ui為后件代表值,u*為計算輸出的清晰值,n為規則數。
3 實驗研究
實驗裝置為一電動機-發電機組,采用實驗室自主研發,以TI公司DSP2812芯片為控制核心的交流伺服系統。電動機采用三洋P6系列PMSM電機,電機的基本參數如表2所示。
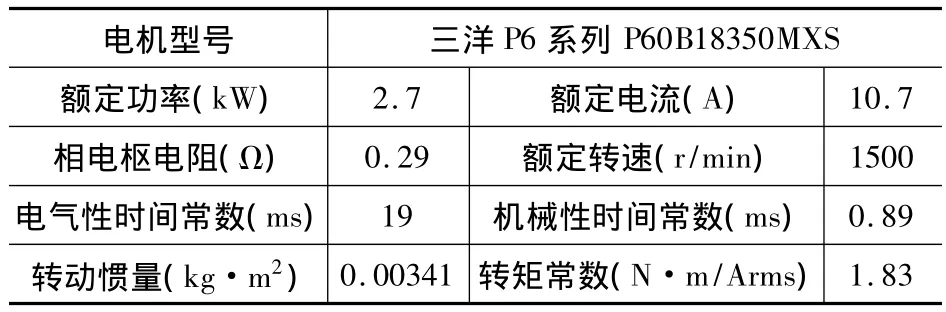
表2 電機基本參數
3.1 電流環對象辨識
如1.1節所述,取電流濾波時間常數為0,給定vq,得到iq的響應曲線如圖5所示。

圖5 vq-iq響應曲線

3.2 電流跟隨實驗
根據電機電流環對象參數,按照式(1)和(2)設計電流控制器參數。設定速度指令為nref=750sin(2πt)時的電流跟隨實驗波形如圖6所示。
根據一階慣性對象階躍響應與參數之間的關系得到:
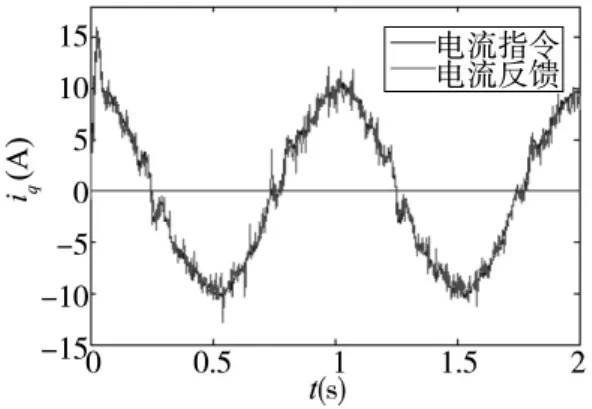
圖6 電流跟隨響應曲線
由圖6可以看出,電流反饋雖然干擾較大,有些毛刺,但是能夠緊緊跟隨電流指令,滿足設計電流環時對電流環跟隨性的要求。
3.3 轉速響應實驗
速度階躍響應如圖7所示。圖7a設定電機轉速為750r/min,其中曲線a、b、c對應的PI參數分別采用模糊整定、人工整定、工程設計方法。實驗中取調節時間為速度響應最后一次進入2%誤差帶的時間。表3為三條響應曲線對應的超調量和調節時間。圖7b為采用模糊整定參數,速度指令分別為150r/min、300r/min、750r/min、1050r/min、1350r/min 時的響應曲線。
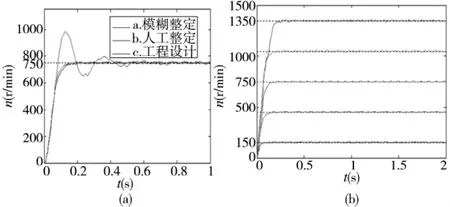
圖7 速度階躍響應

表3 速度階躍響應性能
由圖7及表3三種不同整定方法得到的響應可以看出,通過工程設計方法得到的響應曲線超調量很大,調節時間較長,不能滿足對速度響應快速、準確的要求;人工整定曲線在超調量和調節時間指標上都明顯優于另外兩種整定方法,達到了較為理想的性能;模糊整定方法經過6次整定得到的響應已經接近人工整定的響應曲線,基本滿足要求。在圖7b中,在全速范圍內選取不同速度設定值,階躍響應均取得了較好的性能,控制器采用模糊整定后參數可在全速范圍內運行。綜上所述,經過速度控制器參數的模糊整定,速度響應得到了較大改善,在全速范圍內運行平穩,取得了較好的控制效果。
4 結束語
本文對PMSM控制器參數的整定進行了研究。首先根據對象辨識及電機參數以工程設計方法設計控制器參數,然后設計速度控制器參數模糊整定。根據速度階躍響應的超調量和調節時間,經模糊推理,離線調整控制器參數。實驗表明,經過工程設計和較少次數離線調整,得到了較好的速度響應性能。本文應用所述方法,實現了數控加工中心進給軸驅動控制器參數的快速整定,增強了伺服系統適應性,適用于機床新安裝或電機、負載發生變化后,首次運行前對控制器參數進行整定。
[1]Yoon-Seok H,Jung-Soo Choi,Sensorless PMSM driver with a sliding mode control based adaptive speed and stator resistance estimator[J].IEEE Transaction on Magnetic,2000,36(5):3588-3591.
[2]陳榮,嚴仰光.永磁同步電機速度階躍響應研究[J].中小型電機,2005,32(1):41-451.
[3]Ziegler J G,Nichols N B.Optimum settings for automatie controllers[J].Tran.A SME,1942,64:759-768.
[4]陶永華,尹怡欣,葛蘆生.新型PID控制及其應用[M].北京:機械工業出版社,1998.
[5]施偉鋒,陳子順,湯天浩.船舶發電機勵磁系統的CMAC神經網絡并行控制[J].電網技術,2005,4(29):31-35.
[6]劉金錕.智能控制[M].北京:電子工業出版社,2005.
[7]陳伯時.電力拖動自動控制系統[M].北京:機械工業出版社,2003.
Research on Controller Parameters Self-tuning of PMSM
NIU Yong-ling, PI You-guo
(College of Automation Science and Engineering,South China University of Technology,Guangzhou 510640,China)
This paper researches on controller parameters self-tuning of the double closed loop control system of Permanent Magnet Synchronous Motor(PMSM).The controller parameters of current loop are tuned by means of the engineering design method according to the parameters obtained by the identification of current loop’s object.The controller parameters of speed loop are tuned by means of fuzzy selftuning.According to overshoot and settling time of the speed response,the speed controller parameters are changed after getting the adjustment quantity by fuzzying,fuzzy reasoning and defuzzification and fixed until meeting the performance index.The experiment shows that this method improves the speed response and the controller parameters are tuned rapidly after the PMSM being fixed.
PMSM;engineering design method;fuzzy self-tuning;PID controller
TH16;TG65
A
1001-2265(2012)02-0084-04
2011-07-13
廣東省產學研結合項目(2009B090300269)
牛永嶺(1987—),男,河南人,華南理工大學研究生,研究方向PMSM控制器參數自整定,(Email)scut_niuyl@139.com。
(編輯 趙蓉)
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56