Elman神經(jīng)網(wǎng)絡(luò)多傳感器融合技術(shù)的研究與應(yīng)用
2012-09-19 13:24:38劉西秀
自動化儀表 2012年11期
關(guān)鍵詞:融合
劉 勇 張 民 劉西秀
(青島理工大學(xué)自動化工程學(xué)院,山東 青島 266033)
0 引言
傳感器是電子衡器中最重要的檢測元件之一。然而由于其器件本身的原因,導(dǎo)致其在溫度變化較大的環(huán)境中輸出非線性信號,誤差較大。
國內(nèi)外學(xué)者對傳感器的補(bǔ)償問題進(jìn)行了大量的研究,得出了很多方法[1-5]。其中一種方法是采用電阻網(wǎng)絡(luò)等硬件措施來抑制非目標(biāo)參量的影響,但由于電阻本身也受溫度等環(huán)境參量的影響,補(bǔ)償效果不佳;另一種方法是利用軟件補(bǔ)償,多采用神經(jīng)網(wǎng)絡(luò)法。一些前饋神經(jīng)網(wǎng)絡(luò)(如BP、RBF等)能簡單方便地實(shí)現(xiàn)傳感器的非線性靜態(tài)補(bǔ)償,但這些前饋神經(jīng)網(wǎng)絡(luò)一般不具有動態(tài)信息處理能力,在很多場合不能滿足要求。反饋型網(wǎng)絡(luò)增加了層間或?qū)觾?nèi)的反饋連接,對動態(tài)系統(tǒng)的辨識精度和網(wǎng)絡(luò)結(jié)構(gòu)都較前饋網(wǎng)絡(luò)有了較大的改善,因此在許多場合獲得了廣泛的應(yīng)用。
本文采用Elman反饋型神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)傳感器的非線性校正,對采樣數(shù)據(jù)進(jìn)行訓(xùn)練,學(xué)習(xí)速率快,且取得了很好的補(bǔ)償效果。
1 信息融合基礎(chǔ)
多傳感器信息融合技術(shù)(multi-sensor information fusion,MSIF)是指對來自多個傳感器的數(shù)據(jù)進(jìn)行多級別、多方面、多層次處理,以產(chǎn)生新信息的技術(shù)。這種新信息是任何單一傳感器所無法獲得的。MSIF是新興的多學(xué)科交叉的研究領(lǐng)域,涉及信號處理、概率統(tǒng)計(jì)、信息論、模式識別、人工智能、模糊數(shù)學(xué)等多種理論,是人類模仿自身信息處理能力的結(jié)果[6-9]。
信息融合方法可以分為數(shù)據(jù)級融合(也稱像素級融合)、特征級融合和決策級融合三級。本文采用數(shù)據(jù)級融合技術(shù),其原理圖如圖1所示。
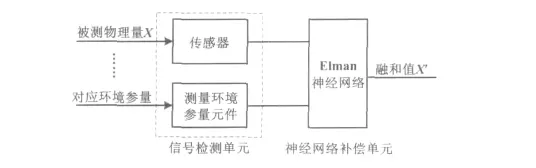
圖1 數(shù)據(jù)級融合技術(shù)原理圖Fig.1 Principle of data fusion technology
數(shù)據(jù)級融合是對來自同等量級的傳感器原始數(shù)據(jù)的直接融合,是在各種傳感器的原始測試數(shù)據(jù)未經(jīng)預(yù)處理之前就進(jìn)行的綜合與分析。這是最低層次的融合。該融合的主要優(yōu)點(diǎn)是能保持盡可能多的現(xiàn)場數(shù)據(jù),能提供其他融合層次所不能提供的細(xì)微信息[1-2]。
2 Elman神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)及學(xué)習(xí)算法
Elman網(wǎng)絡(luò)是一種典型的反饋網(wǎng)絡(luò),最初由Elman在1990年提出。該模型是在BP網(wǎng)絡(luò)的隱含層中增加一個承接層,這種結(jié)構(gòu)使隱含層的輸出不僅作為輸出層的輸入,而且還連接隱含層內(nèi)的另外一些神經(jīng)元。Elman神經(jīng)網(wǎng)絡(luò)自身含有動態(tài)環(huán)節(jié),這不僅使系統(tǒng)具有適應(yīng)時變特性的能力、能直接反映動態(tài)過程系統(tǒng)的特性,而且減少了較多的系統(tǒng)狀態(tài)作為輸入,節(jié)省了輸入層單元數(shù)。Elman神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)如圖2所示。
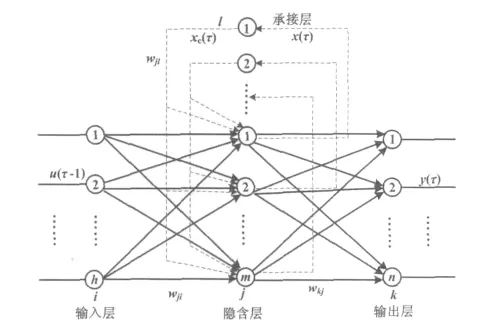
圖2 Elman神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)圖Fig.2 Structure of Elman neural network
圖2中:i為輸入層神經(jīng)元下標(biāo)變元(i=1,2,…,h),j為隱含層神經(jīng)元下標(biāo)變元(j=1,2,…,m),l為承接層神經(jīng)元下標(biāo)變元(l=1,2,…,m),k為輸出層神經(jīng)元下標(biāo)變元(k=1,2,…,n);f(1)(·)、f(2)(·)和 f(3)(·)分別表示輸入層、隱含層、輸出層的激發(fā)函數(shù),上標(biāo)(1)、(2)分別表示相應(yīng)的層數(shù);wji為輸入層第i個神經(jīng)元到隱含層第j個神經(jīng)元的連接權(quán)值;wjl為結(jié)構(gòu)層到隱含層的連接權(quán)值;wkj為隱含層第j個神經(jīng)元到輸出層第k個神經(jīng)元的連接權(quán)值。
網(wǎng)絡(luò)的誤差函數(shù)為:

式中:ydk為輸出層各節(jié)點(diǎn)的期望值;P為樣本數(shù)。
第p(p=1,2,…,P)個樣本的輸入輸出關(guān)系如下。
輸入層輸入為:

輸入層輸出為:

隱含層輸入為:

隱含層輸出為:

承接層輸入為:

承接層輸出為:

輸出層輸入為:

輸出層輸出為:

3 Elman神經(jīng)網(wǎng)絡(luò)融合
Elman神經(jīng)網(wǎng)絡(luò)融合憑借Elman神經(jīng)網(wǎng)絡(luò)優(yōu)異的非線性和時變性處理能力,建立反映復(fù)雜非線性關(guān)系的網(wǎng)絡(luò)擬合模型,不斷逼近網(wǎng)絡(luò)的實(shí)際輸出值。Elman神經(jīng)網(wǎng)絡(luò)融合的主要工作包括以下幾方面的內(nèi)容。
①在可能的工作環(huán)境下采集相應(yīng)的傳感器數(shù)據(jù);
②提取有用數(shù)據(jù)并歸一化處理;
③將處理的數(shù)據(jù)分成訓(xùn)練集和測試集兩部分,采用Elman神經(jīng)網(wǎng)進(jìn)行學(xué)習(xí)和建模;
④測試測試集是否合適。
數(shù)據(jù)融合流程如圖3所示。
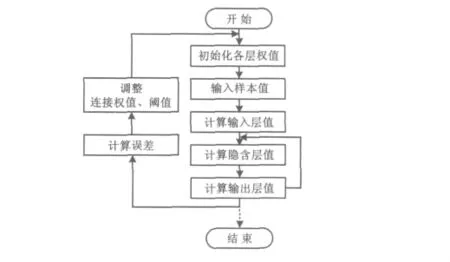
圖3 數(shù)據(jù)融合流程圖Fig.3 Flowchart of data fusion
4 仿真試驗(yàn)及結(jié)果分析
本試驗(yàn)樣本包括訓(xùn)練樣本和測試樣本共7個不同溫度點(diǎn)試驗(yàn)數(shù)據(jù)。選取其中的4個溫度點(diǎn)的數(shù)據(jù)作為訓(xùn)練樣本,另外3個溫度點(diǎn)數(shù)據(jù)作為測試樣本,每個樣本點(diǎn)數(shù)據(jù)為14個,當(dāng)溫度分別為0℃、20℃、40℃時,具體試驗(yàn)數(shù)據(jù)如表1所示。
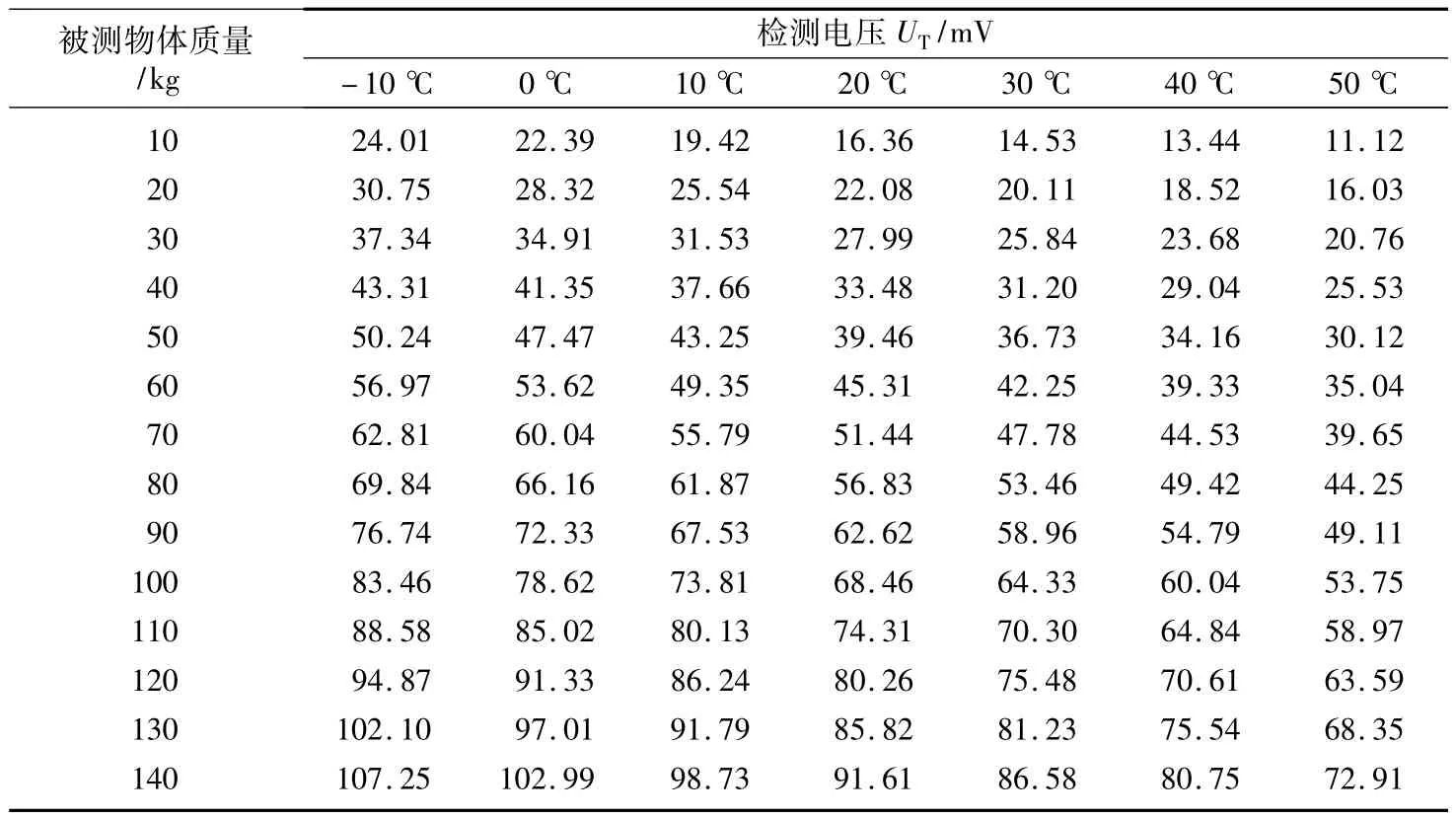
表1 傳感器采樣數(shù)據(jù)值Tab.1 Sensor sampling data values
在神經(jīng)網(wǎng)絡(luò)信息融合之前,進(jìn)行樣本數(shù)據(jù)歸一化。訓(xùn)練樣本的處理是一項(xiàng)重要內(nèi)容,因?yàn)樵紨?shù)據(jù)的分支可能相差很大,神經(jīng)網(wǎng)絡(luò)對于輸入網(wǎng)絡(luò)的數(shù)據(jù)有著較為嚴(yán)格的要求,輸入的數(shù)據(jù)過小或過大都會影響網(wǎng)絡(luò)算法的收斂。直接采集的樣本數(shù)據(jù)不能直接用于Elman神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí),必須對它們進(jìn)行歸一化處理。本文采用線性函數(shù)進(jìn)行歸一化處理[10]:

式中:x為轉(zhuǎn)換前的樣本數(shù)值;y為轉(zhuǎn)換后的樣本數(shù)值;Vmin為樣本數(shù)據(jù)集的最小值;Vmax為樣本數(shù)據(jù)集的最大值。
采用Matlab仿真得到訓(xùn)練過程如圖4所示。
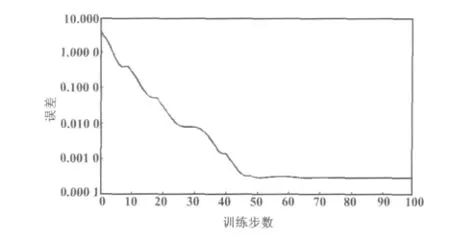
圖4 Elman神經(jīng)網(wǎng)絡(luò)訓(xùn)練過程Fig.4 Elman neural network training process
數(shù)據(jù)融合測試樣本曲線如圖5所示。

圖5 數(shù)據(jù)融合測試樣本曲線Fig.5 Data fusion test sample curves
Elman神經(jīng)網(wǎng)絡(luò)校正補(bǔ)償后的幾組數(shù)據(jù)結(jié)果都明顯接近目標(biāo)值,且由于工作環(huán)境溫度變化產(chǎn)生的傳感器輸出電壓的相對波動值明顯變小。傳感器輸出電壓相對波動值如式(11)所示:

式中:δp為重力傳感器輸出電壓波動的相對值;max|Δp|為傳感器輸出電壓的最大絕對波動值;pFS為傳感器滿量程輸出電壓值。
采用Elman神經(jīng)網(wǎng)絡(luò)得到的被測壓力融合值,部分?jǐn)?shù)據(jù)融合結(jié)果如表2所示。

表2 數(shù)據(jù)融合結(jié)果分析Tab.2 Data fusion result analysis
5 結(jié)束語
Elman及其改進(jìn)的神經(jīng)網(wǎng)絡(luò)模型與其他神經(jīng)網(wǎng)絡(luò)模型一樣,具有輸入層、隱層和輸出層,具有學(xué)習(xí)期和工作期,因此,其具有自組織、自學(xué)習(xí)的特征。另外,由于在Elman神經(jīng)網(wǎng)絡(luò)模型中增加了隱層及輸出層節(jié)點(diǎn)的反饋,更進(jìn)一步地增強(qiáng)了網(wǎng)絡(luò)學(xué)習(xí)的精確性、容錯性以及動態(tài)學(xué)習(xí)能力。
通過本文的實(shí)際應(yīng)用結(jié)果可知,Elman動態(tài)遞歸網(wǎng)絡(luò)可以映射動態(tài)特征,處理時變對象具有較好的應(yīng)用前景。它具有較強(qiáng)的魯棒性、通用性和客觀性,充分體現(xiàn)了反饋神經(jīng)網(wǎng)絡(luò)方法的優(yōu)越性和合理性。這種神經(jīng)網(wǎng)絡(luò)方法在其他領(lǐng)域預(yù)測和評價方面將具有較好的實(shí)際應(yīng)用價值。
[1]周春光.計(jì)算智能:人工神經(jīng)網(wǎng)絡(luò)·模糊系統(tǒng)·進(jìn)化計(jì)算[M].吉林:吉林大學(xué)出版社,2009.
[2]劉君華.智能傳感器系統(tǒng)[M].西安:西安電子科技大學(xué)出版社,2004:388 -406.
[3]聞新,周露,李翔,等.Matlab神經(jīng)網(wǎng)絡(luò)仿真及應(yīng)用[M].北京:科學(xué)出版社,2003:147 -160.
[4]叢爽.面向Matlab工具箱的神經(jīng)網(wǎng)絡(luò)理論與應(yīng)用[M].合肥:中國科學(xué)技術(shù)大學(xué)出版社,2003.
[5]孟令啟,孟夢.Elman神經(jīng)網(wǎng)絡(luò)在中厚板軋機(jī)寬展預(yù)測中的應(yīng)用[J].吉林大學(xué)學(xué)報:工學(xué)版,2008,38(1):193 -196.
[6]韓旭明,祝明,紀(jì)澍琴,等.OIF Elman神經(jīng)網(wǎng)絡(luò)在股市預(yù)測中的應(yīng)用[J].長春工業(yè)大學(xué)學(xué)報:工學(xué)版,2006,27(2):135 -138.
[7]王秀芳,句莉莉,魏春明,等.基于Elman神經(jīng)網(wǎng)絡(luò)的傳感器補(bǔ)償算法研究[J].科學(xué)技術(shù)與工程,2009(20):5987 -5990.
[8]耿華,張濤,連小珉,等.北斗衛(wèi)星與車載傳感器融合的車輛定位[J].汽車工程,2007,29(11):929 -933.
[9]湯永花.制絲線電子皮帶秤動態(tài)稱重系統(tǒng)的設(shè)計(jì)研究[D].西安:西安科技大學(xué),2006.
[10]鄒永祥.基于神經(jīng)網(wǎng)絡(luò)的信息融合與應(yīng)用[D].成都:成都理工大學(xué),2008.
猜你喜歡
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
數(shù)學(xué)年刊A輯(中文版)(2022年4期)2022-02-16 08:17:34
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
無線電通信技術(shù)(2021年4期)2021-07-13 08:58:28
無線電通信技術(shù)(2021年3期)2021-06-08 03:33:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
福利中國(2015年4期)2015-01-03 08:03:38
