一種新的消防員定位方法
2012-09-21 08:22:04王守輝曾梟林郭建宏孟凡坤
中國科技信息 2012年20期
王守輝 曾梟林 郭建宏 孟凡坤
信息工程大學信息工程學院,河南鄭州 450001
一種新的消防員定位方法
王守輝 曾梟林 郭建宏 孟凡坤
信息工程大學信息工程學院,河南鄭州 450001
隨著定位技術的發展,消防員定位技術也越來越受到關注;由于已有的技術存在一些缺陷,無法滿足實際需求,因此我們提出了一種新的消防員定位技術,它采用基于卡爾曼濾波的三維TDOA/AOA混合算法,定位精度較高,可以滿足實際需求;最終對算法進行仿真,得出了一些重要結論。
消防;定位技術;卡爾曼濾波
引言
目前,火災事件頻發,而消防員的安全還得不到保障,消防員為搶救國家和人民的生命財產而英勇犧牲的事件屢有發生。據統計,在過去幾年中,全國平均每年有二十多名消防官兵在滅火救援行動中因公殉職[1]。
隨著定位技術的發展,國內外專家針對消防員火場定位技術進行了一系列研究,取得了很大進展,消防員的生命安全在一定程度上得到了保障。最為典型的是基于GPS和Zigbee的定位技術。
GPS技術是基于美國GPS衛星定位系統開發的,但是由于GPS信號難以穿透墻壁進行傳播,所以GPS在室內定位精度很差,無法滿足實際需求。現在國外大都采用基于Zigbee的預先布點現場定位技術[1],但由于這種技術需要預先布置節點,成本較高,不適合我國使用。
結合我國實際情況和現有技術的優缺點,我們提出了一種利用UWB信號的消防員定位技術。它通過測量消防員攜帶的信號源發出的UWB信號到達消防車上搭載的天線時的時間差和角度,采用TDOA/AOA混合算法,來計算出消防員的位置,以實現定位。由于測得的角度值誤差較大,還需要用卡爾曼濾波器對測得的角度值進行濾波,以進一步提高測量精度。
1 技術實現
1.1 技術綜述
這種定位技術只需利用信號發射源、天線、接收機等基礎設備。具體原理如下:
消防員進入火場時攜帶一個簡單信號發射源。由于火場環境惡劣,消防員可能忙于救援或已生命垂危,無法主動與外界聯系,所以該信號發射源應每隔一段時間主動向外發射信號。
消防車上裝有用于接收信號的天線,天線采用倒三角形[2],整個天線上布設有多個天線節點來接收信號,以實現定位功能,天線節點間距離已知。
天線接收到信號后,利用信號到達時間差和到達角度(使用卡爾曼濾波器進行優化),采用TDOA/AOA混合算法對消防員進行定位,天線的架構和優化算法對定位精度有很大影響。
1.2 信道模擬
大量實驗數據表明在UWB中多徑的到達呈現成簇到達的特性。常用的UWB信道模型有泊松模型、模型、模型和IEEE 802.15.3a模型,前兩種模型為比較基礎的超寬帶小尺度信道模型,用的比較少,而IEEE 802.15.3a模型是修正的模型, IEEE 802.15.3工作組的信道模型子委員會將修正的模型作為超寬帶信道的推薦模型,該模型應用范圍廣,實用性強。針對本項目的火場實際情況,我們采用IEEE 802.15.3a模型作為本項目信道模型。
簇到達時間的分布和束到達時間分布為

1.3 卡爾曼濾波
卡爾曼濾波器是一種時域上的濾波器,可以使估計均方誤差最小。它是一種遞歸估計,即只要獲知上一時刻狀態的估計值以及當前狀態的觀測值就可以計算出當前狀態的估計值。
在測角中,由于消防員的移動速度較慢,可以認為其遠小于系統的采樣速率,則模型可以看作是線性的。
我們利用卡爾曼濾波器的五個基本公式就可以得到其在角度濾波中的公式:

1.4 三維TDOA/AOA算法
文獻[3]討論了二維的TDOA/AOA算法,這里我們由實際出發,研究三維的TDOA/AOA算法。設個天線節點分布在三維空間上,為目標點的坐標,為第 個節點的已知位置,主節點為。則目標點與第個節點的距離為:


令(5)式中為1可得:

由于主節點在原點,因此將(7)式帶入(8)式可得:


根據AOA測量值 可建立方程:

可得到矩陣:
其中 為方位角, 為俯仰角。可得噪聲的誤差矢量為:


采用加權最小二乘(WLS)算法,用TDOA和AOA測量值的聯合協方差矩陣Q近似替代誤差矢量的協方差矩陣可得;其中由于是未知的所以還不能解出,所以我們還需進一步的做近似。令。則可得到該式的近似:


計算得到:

其中:
最終目標點的計算位置為:

2 改進的混合算法仿真結果與分析
當消防員的坐標為,天線節點數為7,天線節點間距離為5m時仿真得到下面的結果:

圖1 定位整體效果圖
由圖1可知,由于信道內各種噪聲的干擾,使得最后定出的消防員的位置在小范圍內波動。在卡爾曼濾波器中設置的目標坐標初始值為0,因此定位有個快速收斂階段。
2.1 天線節點數對定位精度的影響

圖2 天線節點數不同時的誤差曲線圖
從圖2可以看出,當天線節點數為5時,平均定位誤差約為4m,且波動比較大;當天線節點數為6時,平均定位誤差約為2m,波動較小;當天線節點數為7時,平均定位誤差為1.5m。天線節點數越多,定位精度越高,但是當節點數目達到一定時,節點數目的增加對精度的改善效果不明顯,而且隨著天線節點數的增多,設備也越來越復雜。由于本項目對定位精度要求較高,采用7個天線節點為宜。
2.2 目標與天線間距離對定位精度的影響
當天線節點數為7,天線節點間距離為5m,消防員和天線之間距離不同時仿真得到下面結果:

圖3 定位范圍不同時的誤差曲線圖
從圖3可以看出:當消防員距離天線二百米時,平均定位誤差約為3m,且波動比較大;當消防員距離天線一百米時,平均定位誤差約為1.5m,波動較小;當消防員距離天線10m時,基本無定位誤差。因此可以得出:當消防員與天線節點之間的距離越大,定位誤差越大,且波動越大,這是由于當消防員距離較遠時,在火場這種環境下,受到的干擾較大,且信號強度減弱,因此此種技術有一定的應用范圍,要求定位范圍小于200m。
2.3 俯仰角、方位角對定位精度的影響
當天線節點數為7,天線節點間距離為5m,距離100m,方位角為45度,俯仰角不同時仿真得到下面結果:
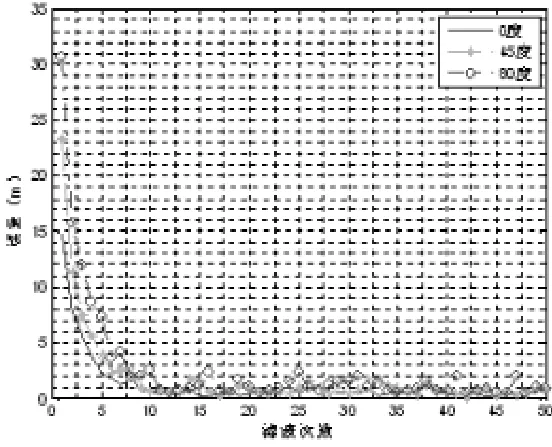
圖4 俯仰角不同時的誤差曲線圖
從圖4可以看出:當俯仰角在0~80度范圍內變化時,定位誤差變化只有細微差別;但仍可以看出隨著俯仰角的增大,誤差曲線波動增大,定位誤差也增大。
當天線節點數為7,天線節點間距離為5m,距離為100m,俯仰角為45度,方位角不同時仿真得到下面結果:
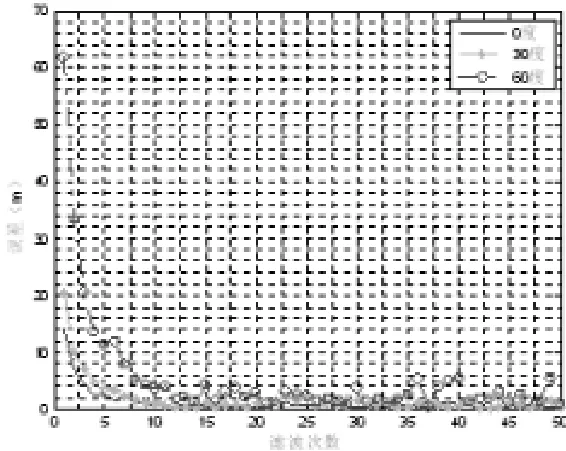
圖5 方位角不同時的誤差曲線圖
經過仿真發現,當方位角為60度時,平均定位誤差約為2.5m,且波動很大;當方位角為30度時,平均定位誤差約為1.5m,波動較小;當方位角為0度時,定位誤差為0.5m。可以得出:隨著方位角變大,定位誤差變大,所以天線應正對著火場。
3 結語
在本文中,為了能夠適合火場惡劣環境的定位需求,我們采用了TDOA/AOA混合算法,同時利用目標位置的角度和時間參量,減少了定位誤差,提高了定位精度。與此同時,我們利用卡爾曼濾波對得到的角度值進行濾波,得到更加精確的角度值,進一步提高了定位精度。最后通過仿真得到了一些有實際意義的結論。
[1]宋娜娜,胡斌.災害現場遇險消防員定位技術研究現狀[J].公安部上海消防研究所,2009.[2]王永誠,張令坤.多站時差定位技術研究[J].現代雷達,2003,2(25):1-4.
[3]于進剛,盧愛華.UWB信道模型簡介[J].西安郵電學院學報,2006,11(1):29-32.
10.3969/j.issn.1001-8972.2012.20.092
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(2016年9期)2016-02-27 09:05:39
核科學與工程(2015年4期)2015-09-26 11:59:03
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
