儲能式電動操作機構的設計
2012-09-22 05:49:40毛海鋒徐惠興樓銘達
電氣技術 2012年2期
毛海鋒 徐惠興 樓銘達
(蘇州未來電器有限公司,江蘇 蘇州 215144)
儲能式電動操作機構是目前國際上普遍使用、技術上較為先進的電動操作機構,相對于電機驅動的電動操作機構,其主要優點是由儲能機構的預儲能來推動塑殼斷路器的合閘具有快速合閘的特性,一般合閘時間小于 100ms,普通的電機驅動的電動操作機構合閘時間一般大于1000ms。
1 設計新一代的儲能式電動操作機構要重點解決的關鍵技術問題是
1.1 儲能電動操作裝置的儲能系統
傳統的儲能電動操作裝置中的儲能系統一般采用兩種方式。
第一種,采用拉簧直接作用在與塑殼斷路器手柄相抵接的滑塊上,通過鎖扣來儲能和釋放操作,目前西門子的儲能電動操作裝置采用該結構。這種儲能系統要求彈簧壓縮行程比較大,影響拉簧的壽命;由于拉簧拉住儲能電動操作裝置的滑塊,滑塊就無法隨手柄移動,影響對儲能電動操作裝置的狀態指示機構的設計。
第二種,用直列式壓簧壓縮儲能往復運動的儲能電動操作機構,目前施耐德、三菱的儲能電動操作裝置采用該結構。這種儲能系統的壓簧大致垂直地設置在儲能電動操作裝置中,使整個儲能電動操作裝置的結構復雜,成本也相對較貴。
我們現在設計了一種儲能電動操作裝置的儲能系統(圖1),包括:支撐座及其上的操作機構,減速機構,儲能機構和釋能機構。儲能機構和釋能機構使儲能電動操作裝置在儲能和釋能兩種狀態之間切換。儲能機構包括凸輪和彈簧,凸輪設置在支撐座上并可以轉動,凸輪上偏心設有軸,軸與設置在支撐座上的軸之間連接有彈簧,當儲能電動操作裝置處于儲能狀態時,兩個軸處于近距離位置,彈簧呈壓縮狀態,當儲能電動操作裝置處于釋能狀態時,兩個軸處于遠距離位置,彈簧呈釋放狀態。
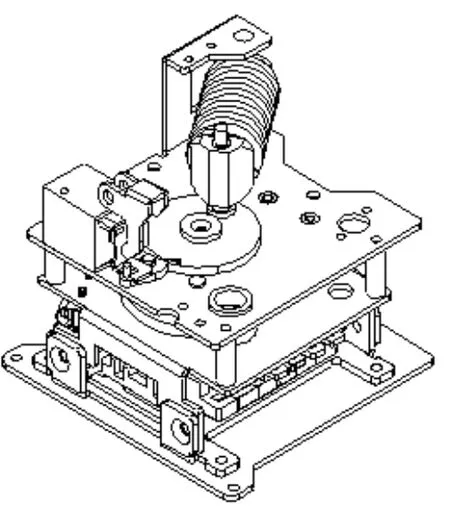
圖1
1.2 帶動手柄的滑塊與儲能機構的脫離結構
現有的儲能電動操作機構的滑塊通常與儲能機構連在一起,滑塊不能隨塑殼斷路器手柄自由滑動,導致無法實現通過由塑殼斷路器的手柄來標識塑殼斷路器三個不同的工作狀態。尤其是當塑殼斷路器從合閘狀態切換到脫扣狀態時,滑塊必須隨塑殼斷路器手柄自由滑動,即滑塊與儲能機構之間應有一定的位移,目前現有的滑塊傳動機構都存在這樣的技術問題。
為解決上述技術問題,我們設計了一種簡單可靠的用于操作塑殼斷路器手柄的滑塊傳動裝置。包括:導柱和滑塊,滑塊沿導柱往復移動,滑塊驅動塑殼斷路器的手柄用以使塑殼斷路器在合閘、分閘、脫扣3個狀態之間切換。儲能電動操作機構的主軸固定連接有一凸輪并帶動凸輪轉動,凸輪上偏心設置有一個滾輪,滾輪驅動滑塊往復移動,且當塑殼斷路器從合閘狀態切換到脫扣狀態時,滾輪與滑塊之間有相對位移(圖2)。
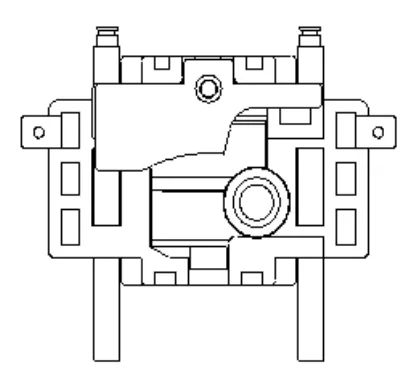
圖2
該設計的有益效果主要體現在:通過由塑殼斷路器的手柄狀態實現了塑殼斷路器3個不同的工作狀態的表示,結構簡單可靠。
1.3 解決電機沖擊問題的離合器結構
當儲能操作完成、機構需停止動作時,電機很難立即停下,其殘余的動能會通過減速機構傳遞到與鎖扣連接的凸輪機構,導致鎖扣與凸輪摒死。要解決該問題,就要在電機和鎖扣機構之間加一個離合裝置,當儲能完成、分閘到位時,電機和鎖扣機構脫離。
目前,國內外同類儲能式的電動操作裝置的離合系統大多采用利用行星輪和棘輪組合系統來實現離合功能。采用利用行星輪系統來實現離合功能,通過主軸轉動帶動凸輪打擊棘齒使母輪可以轉動或鎖定,從而使主動輪帶動行星輪時使母輪空轉或帶動母盤一起轉動,從而實現離合的功能。該結構制造復雜,成本高,所需占用空間大等缺點。
要解決上述技術問題,我們設計了一種結構簡單可靠、成本較低的操作塑殼斷路器的儲能電動操作裝置中的離合系統(圖3、圖4)。包括:支撐座1及設置在支撐座上的帶引導作用的凸臺的齒輪2,和異形齒輪配合的齒輪3固定在回轉板4,以及使回轉板4和固定在回轉板4上的齒輪3回復到和齒輪2嚙合作用的彈簧5。實現了齒輪2和3的自動離合。
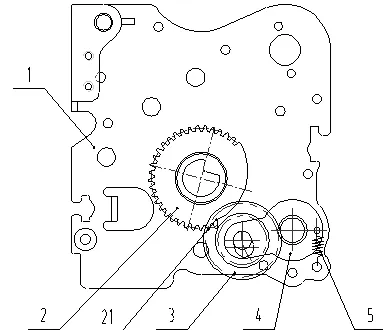
圖3
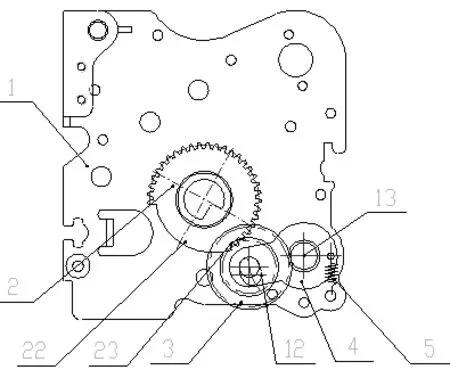
圖4
1.4 儲能電動操作機構的互鎖裝置
現有的儲能電動操作機構的互鎖裝置中只有“手動”和“電動”兩個控制狀態,整個互鎖裝置結構也較為復雜。例如中國專利 ZL99106331揭示了一種儲能閉合式開關設備的聯鎖結構,包括螺旋壓縮閉合彈簧,它通過搖臂連接于凸輪構件以保持彈簧縱向力,凸輪構件有加載凸輪,帶有壓縮閉合彈簧的加載輪廓,以及驅動凸輪構件以實現儲能的可控釋放,從而閉合設備觸頭的閉合輪廓,由彈簧偏壓至非鎖閉位置的閉合支座由彈鍵組件鎖閉,將閉合彈簧固定在加載狀態,彈鍵組件由與閉合支座分開的復位桿復位,閉合支座則在加載中由凸輪構件的轉動復位。當觸頭閉合或起動跳閘松釋時,聯鎖機構防止閉合彈簧松釋。
為解決上述技術問題,我們設計了一種結構簡單可靠的用于電動操作機構在不同操作狀態下對操作起相應限定作用的互鎖裝置。通過以下技術方案來實現:一種儲能電動操作機構的互鎖裝置,包括用于手動分合閘的分合閘按鈕,用于手動儲能的手柄,用于聯通電動分合閘電路的微動開關,用于起到掛鎖作用的鎖板,還包括一個可往復運動的滑板,滑板分別在手動檔、電動檔、掛鎖檔3個位置間滑動,滑板上設有一組鎖舌,鎖舌分別與所述分合閘按鈕、手柄、微動開關和鎖板配接(圖5)。
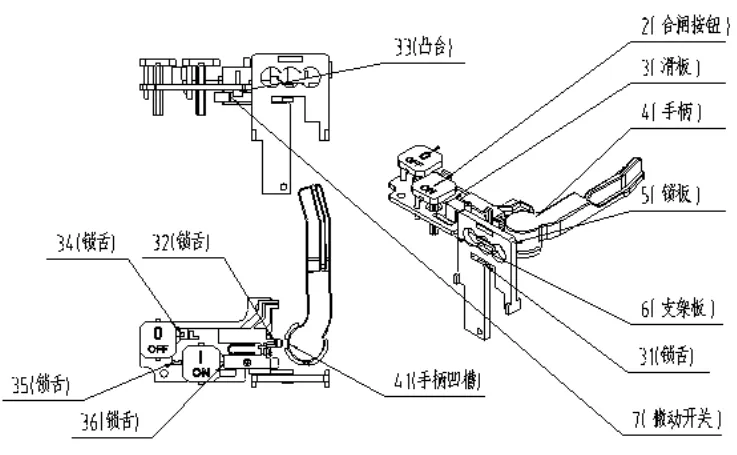
圖5
2 結論
儲能電操是一個系統的工程,除上述問題外還涉及其他的一些關鍵技術的解決和思考如①如何保證鎖扣儲能的可靠鎖住和可靠釋放;②驅動儲能電操的電機力是普通電操的2~2.5倍,這樣就涉及在規定空間中電機的選擇和開關電源的設計;③由于每個操作循環的合閘操作都會由一定的沖擊振動,如何來提高電操的機械壽命;④使儲能電操更好的滿足智能電網的配套需求。
