潛艇操縱性自航模試驗系統設計與組成
2012-09-27 04:34:44陳東賓
船舶 2012年6期
陳東賓
(海軍駐溫州地區軍事代表室 舟山 316000)
0 引 言
模型試驗是目前研究潛艇操縱性的主要手段,而模型試驗又分為自航模試驗和拘束模試驗兩種。其中自航模試驗在研究潛艇耦合水動力導數和大機動性條件下的操縱性具有獨特的優勢。
真正的潛艇自航模技術開發較晚。1957年,日本首先采用長5 m、重2 t的潛艇自航模,在神戶港進行垂直面操縱性試驗;1968年,法國巴黎水池在圣德羅茲灣進行了海上潛艇自航模試驗,試驗用的潛艇模型長6.3 m,分段組裝并采用“程控+遙控”的方式進行操縱;1994年,英國水下防御技術展覽會上展出英國國防研究局研制的無人駕駛潛艇研究模型長4.5 m,潛深可達25 m。美國海軍在1960年曾用“拖辮子”的方式(即由水下潛艇自航模指揮臺圍殼伸出一根天線,或天線上帶小球作為水下接受遙控信號的接受裝置)開展自航模水下機動試驗;到1978年,研制了洛杉磯級首艇的自航模型,長約9.5 m,采用鋁合金殼體;1985年和1997年,為了驗證“海狼”級潛艇和“弗吉尼亞”級潛艇的設計,在極其保密的情況下又分別研制了1∶4的大尺度自航模 LSV-1“科卡尼號”和 1∶3.4 的 LSV-2“卡特斯羅特號”,該船長度和排水量分別為27.43 m、168 t和33.8 m、205 t。
在潛艇自航模試驗展開過程中,最重要是需滿足試驗要求的潛艇模型的加工。基于試驗要求,模型應具備浮力、縱傾力矩的調整能力和螺旋槳調速能力,并且需要在模型上裝載可棄壓載。基于自航功能的實現,模型應具備電力系統(包括直流、交流),自動控制系統,數據采集記錄系統,運動執行機構,與岸基設備的遠程通訊系統。為了方便在岸上檢測潛艇的航行軌跡,還應添加水聲定位系統。下面分別就自航模各個系統的組成進行闡述。
1 自航模模型整體構造
自航模型設計完全模仿某型潛艇的線型和特性,由殼體、內膽框架、艏結構、艉結構以及圍殼組件等組合而成。模型的制作借鑒了魚雷的先進結構形式和加工工藝的要求,其殼體為純鋼制結構,由5個分段構成,除艏部和艉部分段,其他3個分段的底部都安裝有導軌,方便內膽框架的裝配。內膽框架是艇內設備的主要載體,基本上所有的設備都固定在該框架上。艇艏分段為了加強安全性能由雙層殼體組成,艇艉分段上安裝了艉舵系統、主電機及艉軸水密部件。模型指揮臺圍殼采用鋼性塑料制作,內部用于安放長波接收機,并且在圍殼頂蓋通過水密螺栓連接外接天線。該潛艇模型結構突出的優點是水密性能好、接口結構強度高、定位準確,同時為了便于試驗狀態的調試以及設備的檢查維修,拆卸也比較簡單。其詳細結構見圖1。

圖1 自航模總布置示意圖
2 自航模各功能系統構造
自航模內的各種設備較多,從實現其自動航行的功能角度分類,可以分為電力系統(包括直流和交流)、自動控制系統、數據采集記錄系統、運動執行機構、與岸基設備的遠程通訊系統以及水聲定位系統。以上各系統的組成以及之間相互關系參見下頁圖2。
下面就其中的通訊系統、定位系統和自動控制系統予以說明。
2.1 長波遙控系統
潛艇自航模型在進行水下各種運動性能測試和實驗時,均處于潛航狀態,并根據實驗需求進行潛航時的各種操控,操控的指令由通信系統來傳輸。遙控系統是否可靠有效和實時性的好壞直接關系到自航模能否正常潛航、潛航時的安全性以及實驗數據的有效性[1]。
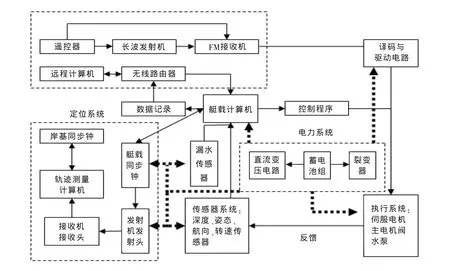
圖2 自航模功能系統組成結構
要使系統具備上述性能,水下無線電通信是其研制的一個難點。無線電通信技術的原理在于:導體中電流強弱的改變會產生無線電波[2]。利用這一現象,通過調制可將信息加載于無線電波之上。當電波通過空間傳播到達收信端,電波引起的電磁場變化又會在導體中產生電流。通過解調將信息從電流變化中提取出來,即可實現信息傳遞[3]。因此,模型采取以無線電長波為載體的長波無線遙控系統來完成潛航時的遙控,該系統由便攜式可移動手持遙控器、陸基短波發射機、陸基長波大功率發射機、艇載長波接收機、艇載短波接收機、譯碼與驅動、短波/長波收發天線等部分組成。如圖3所示。
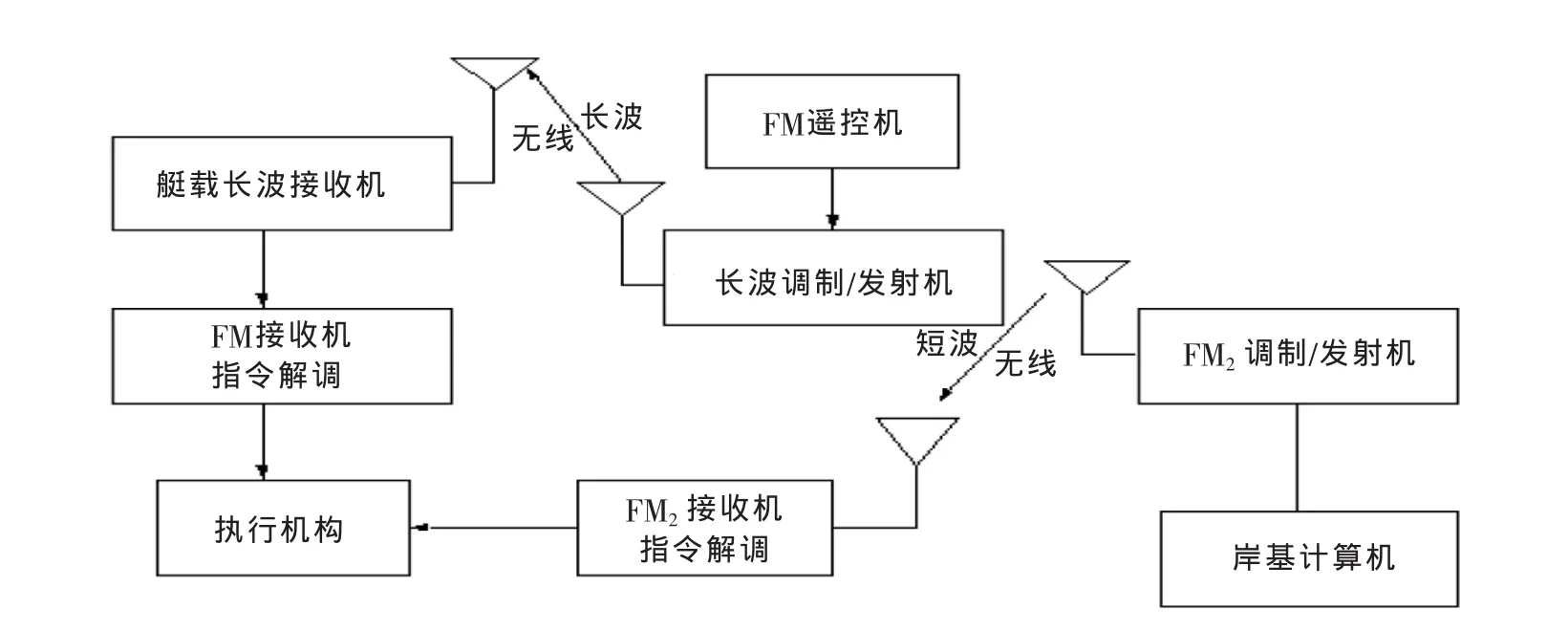
圖3 長波無線遙控系統組成
2.2 自航模水聲軌跡定位系統
由于自航模水下試驗無法從水面進行觀測,一些傳統的定位方法如激光法、鏡面反射法等已不再適用[4]。然而,為了解自航模在水下的運行狀況、確保其航行安全,必須實時了解自航模的位置和深度。這是自航模水下試驗的一個關鍵技術,當前一個比較經濟適用的方法是采用水聲方法對自航模在水下的位置進行定位[5]。建立自航模運動區域的坐標系,由自航模通過水聲換能器發射水聲信號,再由固定于已知坐標位置的水聲換能器接受該信號,并傳入后續設備對該信號進行分析處理,運用適當的計算最終得到自航模在該坐標系中的坐標。具體工作原理如圖4所示。

圖4 水聲定位系統工作原理
2.3 艇載控制系統
操縱系統由艇載嵌入式計算機、I/O接口卡、伺服電機驅動電路、控制信號轉換電路、反饋信號形成電路、反饋信號接收電路、傳感信號形成電路、小舵機開關信號形成電路等部分組成。其信息流程框圖如圖5所示。
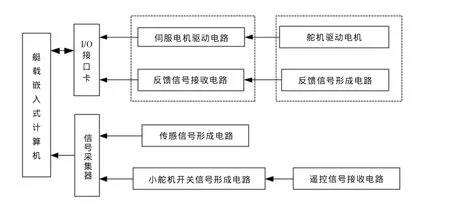
圖5 操縱系統信號流程圖
反饋信號接收電路用來接收有關自航模運行的主推電機轉速、方向、姿態、艇內積水與否等反饋信息,其信息流向是單向的。
伺服電機驅動電路接收來自I/O接口卡的伺服電機驅動信號,直接驅動控制潛艇各個舵的伺服電機以控制舵角。
壓力信號、內部濕度信號、三個陀螺(縱傾陀螺、橫傾陀螺和航向陀螺)信號等信息則由傳感器通過傳感器電路進入信號采集器送至計算機。
作為輔助控制的小舵機可以接收岸上傳來的操縱信號,小舵機根據操縱信號執行的開關動作,形成開關信號送入計算機,各開關信號控制與其對應的執行機構完成相關動作。
作為整個操控系統的信息交流、存儲、控制中心,艇載嵌入式計算機可以通過無線網卡實現與岸基計算機的信息交流,并按照指令要求完成各種動作。
3 自航模系統存在問題
通過自航模試驗,反映出潛艇自航模目前仍存在一些問題,集中表現在:
(1)缺乏模塊化設計模型的手段。目前自航模的設計,大量依靠工人的加工經驗,會導致模型在調整浮態和重力分布難以滿足實艇動力要求,不僅會影響實驗進度,還會導致由于不能滿足相似規律而出現不合理的試驗結果。這一問題需要進一步研究。
(2)缺乏有效的方法采集潛艇自航模的速度信號。潛艇自航模屬于低速運動體,其慣性較大,一般的振動速度傳感器不能有效測量其實時速度。若通過水聲定位系統來差分其速度,而水聲定位系統定位誤差在分米級、采樣頻率為每秒一次、該方法測量得到的結果誤差與模型的運動速度在同一個量級,也不可行。因此,一種切實可行且有效的模型速度測量系統亟待開發。
(3)在大機動條件下,由于模型周圍流場湍流邊界層的影響,水聲信號會出現暫時失效的現象,這與水聲發射頭的布放位置和形式有關,需要進一步研究其中關系,以克服水聲信號暫時消失的問題。
4 結 論
本文介紹了一種已用于試驗的潛艇自航模試驗系統的結構與組成,并著重介紹了其中的長波遙控、水聲定位和自動控制子系統。通過實際的測試證明了自航模試驗技術的可行性,取得的試驗結果對潛艇操縱性的研究有一定的指導意義,也為持續發展潛艇自航模試驗技術開拓了廣闊前景。
[1]畢毅,王波,李和平.水下自航模模型無線長波遙控系統[J].船舶工程,2002,(6):72-74.
[2]沃特A.D.甚低頻無線電工程[M].北京:國防工業出版社,1973:22-48.
[3]沈琪琪,朱德生.短波通信[M].西安:西安電子科技大學出版社,1989:31-56.
[4]王波,畢毅,李和平.水聲式軌跡實時測量系統[J].船舶工程,2003,25(2):53-55.
[5]Coates R.Underwater Acoustic Communication[M].USA:Sea Technology,1994:41-47.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45