660 MW機組協調控制系統的故障分析與改進措施
2012-09-27 00:41:10屠士鳳丁明利
浙江電力 2012年5期
屠士鳳,丁明利
(1.浙能樂清發電有限責任公司,浙江 樂清 325909;2.溫州市工業投資集團有限公司,浙江 溫州 325000)
樂清發電廠二期為2臺超超臨界660 MW燃煤機組(3,4號機組),分散控制系統(DCS)采用北京ABB貝利控制有限公司生產的SYMPHONY系統。協調控制涵蓋了負荷指令控制、鍋爐主控、汽機指令控制、壓力設定、頻率校正、快速減負荷(RB)等控制回路;數字電液控制系統(DEH)的硬件采用Siemens公司的產品,在控制系統中增加了汽機主控部分,這是與一期600 MW機組協調控制系統相比最大的區別。
1 協調控制方式簡介
在協調控制系統中,一般將機組控制方式分為以下4種:基礎方式(BASE),鍋爐主控和汽機主控同處在手動位置;汽機跟隨方式(TF),機前壓力由汽機控制系統控制,負荷通常由鍋爐控制系統開環控制;鍋爐跟隨方式(BF),機前壓力由鍋爐控制系統控制,負荷通常由汽機控制系統開環控制;協調控制方式(CCS),負荷調節同時由汽機和鍋爐通過前饋實現,再通過閉環控制回路對機組功率和機前壓力分別進行校正。一般汽機側重控制負荷,鍋爐側重控制壓力,當壓力偏差大時共同對機前壓力進行控制。
樂清發電廠二期機組的汽機主控在DEH中實現,在自動狀態時分為初壓方式和限壓方式兩種,初壓方式為汽機控制主汽壓力;限壓方式時,汽機控制負荷。可以簡單地理解為限壓控制負荷,初壓控制壓力。初壓方式和限壓方式的切換,在DCS邏輯中判斷實現;汽機遙控指令請求由DCS送至DEH的負荷控制信號也在DCS邏輯中判斷實現。
2 控制系統異常事件分析
2.1 汽泵出口電動門開反饋信號跳變
2011年4月11日00:11,3號機處于自動發電控制(AGC)模式,負荷450 MW,5臺磨煤機運行,機組負荷跳變(最低跳到350 MW),操作員畫面上汽泵RB觸發,AGC、協調退出,汽機切至初壓方式,汽機、鍋爐處于跟隨方式,但大屏RB未報警,磨煤機未跳閘,主蒸汽壓力保持在17.6 MPa左右,并切至定壓運行,機組負荷下滑。00:27運行人員手動復歸汽泵RB信號,機組負荷繼續下滑。00:32機組負荷降至327 MW,運行人員將鍋爐主控撤至手動方式,后手動加煤量將機組負荷穩定在350 MW。其間檢查發現機組RB系3B汽泵出口電動門開反饋信號跳變導致3B汽泵運行狀態丟失引起。后將3B汽泵出口電動門開反饋信號強制。01:31汽機控制切至限壓方式,鍋爐主控自動投入,機組恢復協調方式,見圖1。
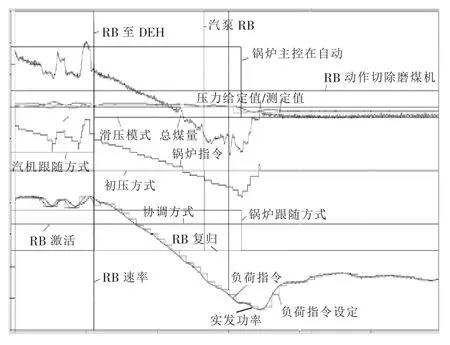
圖1 汽泵RB時的控制系統曲線
汽泵出口電動門開反饋是汽泵運行狀態需要滿足的條件之一,該信號跳變造成汽泵運行信號的跳變,從而導致機組負荷跳變。當汽泵運行信號消失時間大于0.5 s時,就觸發汽泵RB動作。汽泵RB觸發后由汽泵運行信號復歸,所以觸發的時間非常短,RB信號直接將DEH控制由限壓方式切至初壓控制方式。由于控制器掃描周期的影響(掃描周期為250 ms)爐側RB控制回路沒有觸發,因此鍋爐控制回路未走RB回路。在汽機切至初壓方式后,機組協調撤出,負荷指令控制回路撤出自動,鍋爐主控還在自動方式,所以鍋爐控制處于跟隨方式,大屏沒有RB報警。汽機在初壓方式時控制壓力,而此時鍋爐主控也處于跟隨方式控制壓力,因此造成了機爐控制上的混亂,汽機鍋爐控制系統同時控制主汽壓力。由于測量通道上的誤差,主汽壓力機側顯示值比爐側偏低0.2 MPa,在協調撤出時機側實際壓力低于壓力給定值0.1 MPa左右,汽機緩慢關閉調門;爐側實際壓力在17.7 MPa,大于給定值0.1 MPa,鍋爐主控緩慢減煤量。因此機組負荷一直下滑,直至鍋爐主控撤至手動運行。
由于二期機組的汽機主控在DEH中實現,協調控制系統不同于一期超臨界機組的控制方式。DEH的汽機控制方式只有限壓方式(負荷控制方式)和初壓控制方式(跟隨方式),正常情況下限壓方式控制負荷,初壓方式控制壓力,沒有手動方式,汽機在初壓方式時就處于汽機跟隨方式。鍋爐控制方式有協調方式、跟隨方式和手動方式。汽機處于初壓方式時,鍋爐主控將自動切至鍋爐跟隨方式,直接控制壓力,因此會同時出現跟隨方式。其控制方式如表1所示。
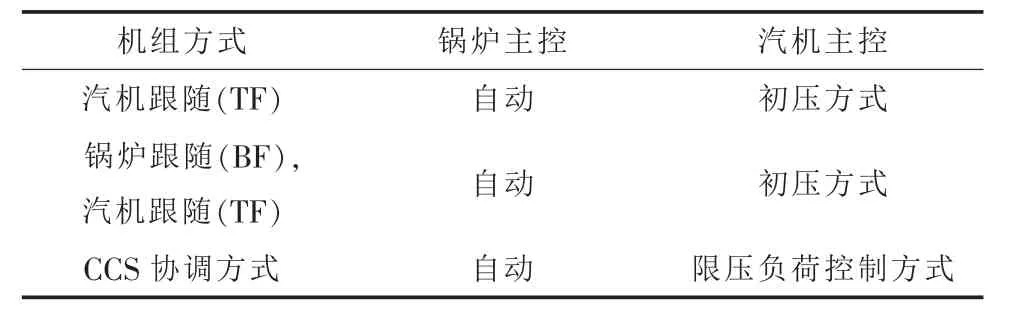
表1 二期機組協調控制方式
2.2 AGC方式下機組加負荷過程中DEH關閉調門
2011年3月10日13:20,4號機處于AGC方式,負荷420 MW,在加負荷時,實際負荷低于負荷指令,壓力偏低,當壓力低于給定值2 MPa時,DEH不再控制負荷增加,引起負荷偏差的進一步增大,但機組仍為協調方式。后運行人員將機組退出AGC方式,協調撤出,待主汽壓偏差<1 MPa,實際負荷上升后重新投入協調控制。DEH中汽機控制方式的切換邏輯如圖2所示。
限壓方式下,當(Ps-2.0 MPa)-Pt>0 時,切至限壓方式下的壓力控制回路,汽機主控控制壓力,即通過開關調門直接控制壓力,壓力定值為(Ps-2.0 MPa)。
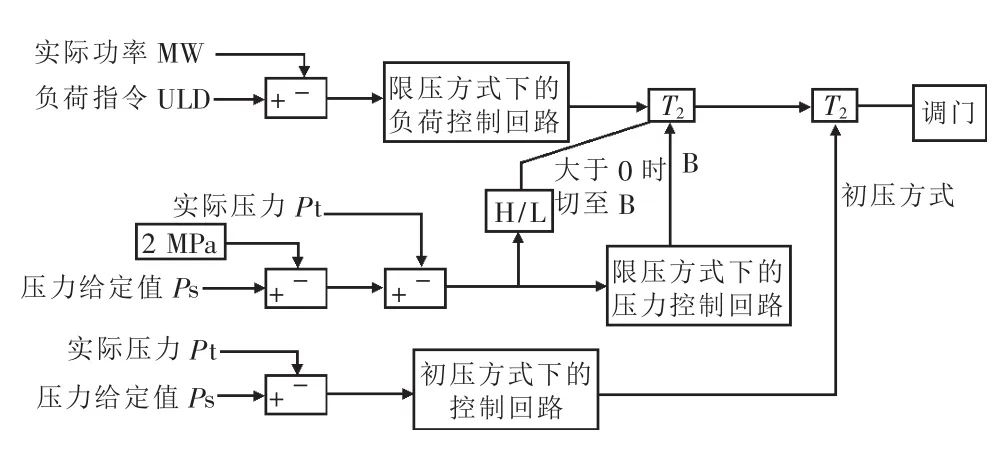
圖2 DEH系統汽機控制方式的切換
在DEH控制系統的限壓控制回路中,當實際主汽壓力低于壓力定值2 MPa時,DEH的汽機控制壓力保護回路起作用,調門控制壓力,不參與負荷調節。此時如果負荷指令繼續上升,根據滑壓曲線,主汽壓力給定值也將繼續上升,造成主汽壓力測量值與給定值偏差的進一步擴大,汽機處于控壓方式,負荷偏差也將進一步增大。因此機組在AGC方式下,要求當機組DEH側的壓力保護回路起作用時,爐側閉鎖負荷指令增,待壓力測量值與給定值偏差小于2 MPa時,恢復負荷控制回路。
2.3 低負荷時一臺汽泵跳閘導致MFT
2011年10月1日15:31,3號機準備停機,機組負荷330 MW,4臺磨煤機運行,給煤量127 t/h;2臺汽泵并列運行,汽泵轉速4 600 r/min左右,給水流量927 t/h。3B小機因速關油壓低低保護動作跳閘,機組主燃料跳閘(MFT)動作,首出信號為給水流量低低(定值為573.2 t/h)。
經檢查發現,由于當時機組負荷低于RB動作的負荷值(370 MW),因此3B小機跳閘后未觸發RB動作。機組負荷控制回路和鍋爐主控控制回路保持不變,未切至RB方式下的控制回路,因此爐側經過焓控修正后的給水指令根據鍋爐主控指令保持在925 t/h。如果汽泵RB動作觸發,鍋爐主控將走RB控制回路,給水指令走RB方式,水量起初會增加。3B小機跳閘4 s后,實際給水流量開始快速下降,這時3A汽泵轉速指令上升,在給水流量低于MFT值后,延時9 s,觸發機組MFT動作,給水流量最低至548 t/h。
在控制邏輯中,當一臺汽泵跳閘后,機側給水控制回路中沒有將跳閘信號直接疊加到運行中的汽泵輸出指令上,而是根據流量測量值低于給水指令的偏差,按調節系統的原理計算控制輸出值,指令增加以提高轉速,因此在時間上相對較慢。加上當時機組負荷低,給水流量小,單臺汽泵出力低于機組MFT定值,因此引起機組跳閘。此次事件暴露出在低負荷時,單臺汽泵跳閘后,另一臺汽泵的響應速度太慢。因此在汽泵指令輸出回路中將原來5 s慣性環節,改成2 s。
3 協調系統改進措施
3.1 鍋爐主控的改進
將鍋爐主控跟隨方式的控制器輸入信號由主汽壓力計算的偏差值改為常數0,同時將控制前饋信號改為常數0。當機組在協調方式時,鍋爐主控跟隨方式控制器跟蹤鍋爐主控輸出;機組協調退出,汽機控制處在初壓方式控制機組主汽壓力,鍋爐主控處在自動時的跟隨方式,此時由于跟隨控制器的輸入偏差信號為0,鍋爐主控控制器輸出保持不變。如有需要,運行人員手動撤出鍋爐主控自動。
3.2 負荷指令控制回路的改進
升負荷過程中機組處于欠壓方式時,如果負荷指令繼續上升,將造成主蒸汽壓力偏差的進一步擴大。實際壓力與給定壓力偏差小于2 MPa時,汽機控制壓力保護回路起作用,由限壓控制負荷方式切換至限壓控制壓力方式。在DEH處于限壓方式的控壓方式時,送“汽機處于限壓方式下控壓方式”信號至DCS,作為負荷閉鎖增的判據,閉鎖機組負荷指令增,待實際壓力小于定值2 MPa時,恢復閉鎖信號,并在操作員站畫面上報警顯示。
3.3 汽泵運行狀態判斷邏輯修改
汽泵原來的運行狀態判斷為:汽泵沒有跳閘信號、汽泵轉速大于2 200 r/min、汽泵出口電動門全開、汽泵出口電動門關信號無。或者另一種判斷依據:汽泵沒有跳閘信號、汽泵轉速大于2 200 r/min、前置泵進口電動門已開、前置泵沒在合位。這兩種不同的判斷汽泵運行狀態方法統一為(以下任一條件丟失時,汽泵運行狀態丟失):無汽泵跳閘信號、小機轉速大于2 200 r/min、汽泵出口電動門已開或前置泵出口流量10 s內下降 250 t取“非”。
3.4 增加高加手動撤出時給水指令切換判斷條件
在手動撤出2臺高加時,給水溫度低于210℃,符合給水指令控制回路和焓控回路中高加出系的判據。給水指令控制回路切換至高加撤出計算回路,給水量增加50 t左右,焓控受限于給水指令,無法修正過熱度,使得過熱度過低,長期維持在10℃左右。因此在高加運行畫面中增加按鈕“手動撤高加”,未投入按鈕的信號和原邏輯中給水溫度低于210℃信號相“與”作為焓控系統中高加自動撤出、給水指令曲線切換的邏輯判據;運行畫面按鈕“手動撤高加”未投入,閉鎖運行人員手動操作1,2,3號抽電動門,但高加水位三高時高加自動出系優先;投入“手動撤高加”,則閉鎖給水溫度低于210℃作為焓控系統中高加未撤出、給水指令曲線不切換的邏輯判據。原邏輯中高加水位三高使高加自動撤出時燃料主控減煤3%~5%及給水系統控制增加水量2%,現改為減煤值保持不變,增加水量1%。
4 結語
樂清發電廠二期工程機組是浙能集團下最先投產的2臺超超臨界機組,DCS側的協調控制方式與其他機組控制方式相比發生了很大的變化。經過對機組運行中暴露問題的不斷分析和深入探討,對協調控制系統進行了多方面的完善和修改,使協調控制系統不管在調節品質還是在穩定性上都有了很大的提高,更好地適應了負荷變化的需要,發揮了機組調頻、調峰的能力,機組的安全性能得到了進一步的提升。
[1]朱北恒.火電廠熱工自動化系統試驗[M].北京:中國電力出版社2006.
[2]祝建飛,姚峻,吳建平.1 000 MW超超臨界汽輪機熱應力檢測及自動控制[J].中國電力,2009,42(6):21-24.
[3]DL/T 774-2004火力發電廠熱工自動化系統運行維護規程[S].北京:中國電力出版社,2004.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
西安航空學院學報(2014年5期)2014-07-13 01:27:52
