無(wú)旁路系統(tǒng)的循環(huán)硫化床鍋爐汽包水位控制
2012-09-27 00:41:10張來(lái)平陳國(guó)清陳霄峰謝國(guó)偉
浙江電力 2012年5期
張來(lái)平,陳國(guó)清,陳霄峰,謝國(guó)偉
(浙江省火電建設(shè)公司,杭州 310016)
汽包水位是鍋爐運(yùn)行的重要參數(shù)之一,間接反映了鍋爐負(fù)荷與給水之間的平衡關(guān)系。當(dāng)鍋爐汽包水位過(guò)高時(shí),會(huì)影響汽包內(nèi)汽水分離裝置的正常工作,造成出口蒸汽中水分過(guò)多,使過(guò)熱器受熱面結(jié)垢從而被燒損,同時(shí)會(huì)使過(guò)熱汽溫產(chǎn)生急劇變化,影響機(jī)組運(yùn)行的經(jīng)濟(jì)性和安全性;當(dāng)汽包水位過(guò)低且負(fù)荷較大時(shí),水的汽化速度很快,導(dǎo)致汽包內(nèi)的水位下降迅速,如不及時(shí)有效控制,就會(huì)使汽包內(nèi)的水全部汽化,甚至導(dǎo)致鍋爐損壞或爆炸。因此,鍋爐汽包水位控制是維持鍋爐安全運(yùn)行的關(guān)鍵之一。
1 存在的問(wèn)題
某發(fā)電廠2×115 MW機(jī)組采用福斯特惠勒上海有限公司生產(chǎn)的無(wú)中間再熱、固態(tài)排渣、自然循環(huán)單汽包循環(huán)流化床鍋爐(CFB)及北京ABB BAILY公司SYMPHONY控制系統(tǒng)。設(shè)計(jì)的給水系統(tǒng)采用2臺(tái)電動(dòng)定速給水泵,三路給水設(shè)計(jì)分別是100%最大連續(xù)出力工況(MCR)流量的主給水、70%MCR流量的旁路給水、30%MCR流量的副給水,其中主、副給水調(diào)節(jié)設(shè)有自動(dòng)控制,旁路給水調(diào)節(jié)為純手動(dòng)控制。
該機(jī)組未設(shè)計(jì)旁路系統(tǒng),采用主汽管道上的向空排汽閥及安全閥泄壓的方式來(lái)維持主蒸汽的壓力。由于這兩個(gè)閥門(mén)都安裝在主蒸汽管道上,并且距離汽包比較近,因此在機(jī)組負(fù)荷有劇烈擺動(dòng)時(shí),如發(fā)生甩負(fù)荷、快速減負(fù)荷(RB)等情況,若通過(guò)向空排汽閥及安全閥泄壓,壓力波動(dòng)比較大,容易導(dǎo)致汽包水位脫離控制而引起鍋爐主燃料跳閘(MFT)。為了能夠很好地控制汽包水位,滿(mǎn)足機(jī)組穩(wěn)定運(yùn)行的要求,尤其在特殊工況下也能控制好汽包水位從而實(shí)現(xiàn)汽包水位的全程自動(dòng)控制,對(duì)汽包水位控制進(jìn)行了優(yōu)化設(shè)計(jì)。
2 汽包水位特性
2.1 汽包水位的控制值
汽包水位控制的要求就是控制給水調(diào)節(jié)盡量使給水量等于蒸汽流量,從而保證汽包水位穩(wěn)定在合適且安全的位置上,即汽包水位的“0”位(見(jiàn)圖1)。水位控制一般要求穩(wěn)定工況時(shí)在±30 mm內(nèi),特殊工況時(shí)在±50 mm內(nèi),跳機(jī)值一般為小于-279 mm或者大于+254 mm。
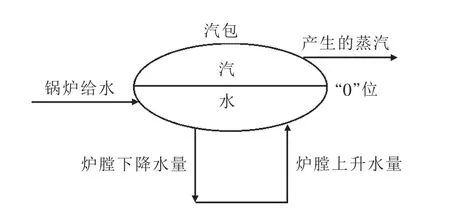
圖1 鍋爐汽包汽水的走向
2.2 給水?dāng)_動(dòng)時(shí)汽包水位的動(dòng)態(tài)特性
當(dāng)給水量增加時(shí),汽包水位一開(kāi)始并不是立即上升,而是經(jīng)過(guò)一段慣性后才會(huì)變化,如圖2所示。這是由于給水溫度低于汽包內(nèi)的飽和水溫度,給水吸收了飽和水中的一部分熱量,使水面汽泡容積減少。當(dāng)水面下汽泡容積不再變化時(shí),水位才會(huì)逐漸上升。
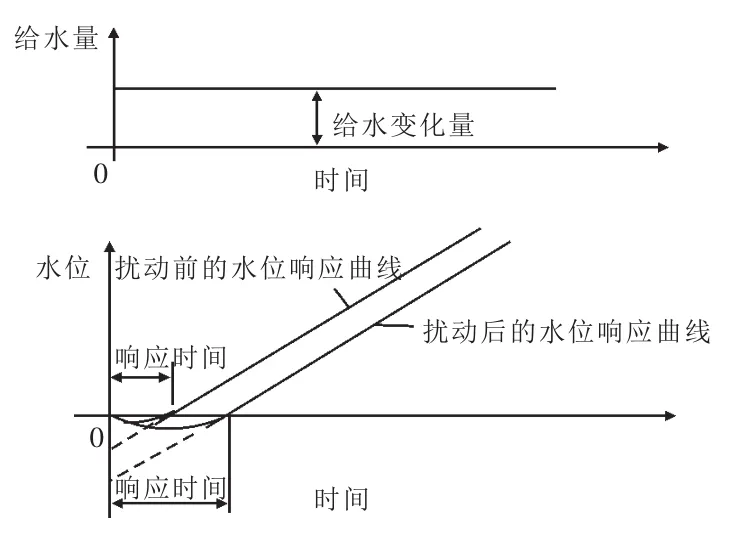
圖2 給水量擾動(dòng)下汽包水位的動(dòng)態(tài)特性
其傳遞函數(shù)可表示為:

式中:T為延遲時(shí)間;ε為響應(yīng)速度,即單位給水流量改變時(shí)水位的變化速度;H(s)為水位;W(s)為給水量;s為變量。
2.3 蒸汽擾動(dòng)時(shí)汽包水位的動(dòng)態(tài)特性
在蒸汽流量階躍擾動(dòng)作用下,汽包水位的動(dòng)態(tài)特性具有帶“虛假水位”的無(wú)自平衡能力的特點(diǎn),如圖3所示。
當(dāng)蒸汽流量突然增加時(shí),由于汽包壓力的下降,汽包內(nèi)的水將突然加劇沸騰,使水中汽泡容積迅速增加而呈現(xiàn)出“虛假水位”現(xiàn)象。當(dāng)虛假水位消失后,水位才會(huì)按積分規(guī)律變化,呈現(xiàn)無(wú)自平衡的特點(diǎn)。
其傳遞函數(shù)可表示為:


圖3 蒸汽流量擾動(dòng)下汽包水位的動(dòng)態(tài)特性
式中:K2為曲線H2的放大倍數(shù);T2為曲線H2的時(shí)間常數(shù);ε為曲線H1響應(yīng)速度,即單位蒸汽流量改變時(shí)水位的變化速度;s為變量。
2.4 無(wú)旁路設(shè)計(jì)的特點(diǎn)
由于該機(jī)組未設(shè)計(jì)旁路控制系統(tǒng),在發(fā)生甩負(fù)荷時(shí)蒸汽量突然減少,造成主汽壓力迅速上升,引起啟動(dòng)排汽閥(30%MCR流量)和鍋爐安全閥動(dòng)作,向空排汽,導(dǎo)致壓力突降,引起急劇的水位波動(dòng)。而主蒸汽流量的測(cè)點(diǎn)安裝在汽機(jī)主蒸汽管道上,此時(shí)控制系統(tǒng)內(nèi)測(cè)得的蒸汽流量要遠(yuǎn)遠(yuǎn)小于實(shí)際蒸汽流量,偏差比較大,導(dǎo)致控制出現(xiàn)偏差,使虛假水位現(xiàn)象更加嚴(yán)重,由于壓力過(guò)低導(dǎo)致水位迅速升高,逼近跳機(jī)值。圖4為汽機(jī)水位控制優(yōu)化前機(jī)組發(fā)生50%甩負(fù)荷試驗(yàn)時(shí)汽包水位的變化情況。
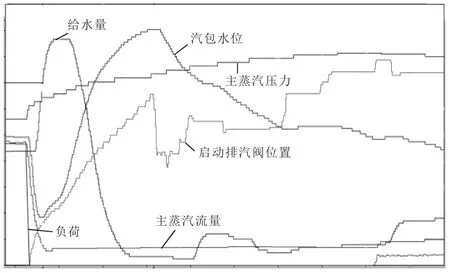
圖4 優(yōu)化前甩50%負(fù)荷時(shí)汽包水位變化
綜上所述,CFB汽包水位動(dòng)態(tài)特性具有以下3個(gè)特點(diǎn):
(1)具有延時(shí)性,即慣性。給水量改變后水位不會(huì)立即改變,延時(shí)時(shí)間與省煤器的形式和給水溫度有關(guān),給水溫度越低,慣性越大。由于CFB鍋爐燃料的顆粒較大,還具有較大的熱慣性。
(2)具有“虛假水位”現(xiàn)象:負(fù)荷突然增加時(shí),蒸發(fā)量小于給水量,水位非但沒(méi)有下降,反而迅速上升;負(fù)荷突然減少時(shí),蒸發(fā)量小于給水量,水位不是立即上升,而是先下降然后再迅速上升。在鍋爐發(fā)生甩負(fù)荷時(shí),虛假水位現(xiàn)象特別嚴(yán)重。如果不加以控制很可能會(huì)引起汽包水位的保護(hù)動(dòng)作,導(dǎo)致鍋爐MFT。
(3)無(wú)自平衡能力。在單位階躍擾動(dòng)下,水位的最大變化速度ε與鍋爐的結(jié)構(gòu)和容量有關(guān),機(jī)組容量越大,ε越大,水位越難以控制。
3 汽包水位控制的優(yōu)化設(shè)計(jì)
針對(duì)CFB的特點(diǎn),對(duì)給水控制系統(tǒng)進(jìn)行了優(yōu)化設(shè)計(jì),其控制原理如圖5所示。

圖5 優(yōu)化后控制原理
3.1 增加啟動(dòng)給水調(diào)節(jié)閥與主給水調(diào)節(jié)閥之間的自動(dòng)切換
為了能夠全程進(jìn)行自動(dòng)控制,增加了采用主蒸汽流量來(lái)控制啟動(dòng)給水控制調(diào)節(jié)閥(30%MCR流量)與主給水控制調(diào)節(jié)閥(100%MCR流量)之間的自動(dòng)切換功能。當(dāng)主蒸汽流量大于15%MCR流量時(shí),流量控制自動(dòng)從啟動(dòng)給水控制調(diào)節(jié)閥切換到主給水控制調(diào)節(jié)閥,同時(shí)水位控制也由單沖量控制切換到三沖量控制。當(dāng)主蒸汽流量小于15%MCR流量時(shí),自動(dòng)切回單沖量控制。三沖量控制系統(tǒng)與單沖量控制系統(tǒng)之間指令互相跟蹤,從而實(shí)現(xiàn)了相互之間的無(wú)擾切換。同時(shí)也設(shè)置了手動(dòng)切換按鈕,運(yùn)行人員可以根據(jù)實(shí)際運(yùn)行情況來(lái)改變控制方式。
3.2 優(yōu)化PID控制參數(shù)
由于控制參數(shù)的多變性和擾動(dòng)的增大,原來(lái)單一參數(shù)的PID(比例-微分-積分)控制已滿(mǎn)足不了要求。為了能夠滿(mǎn)足全程自動(dòng)控制的要求,采用了變參數(shù)PID控制來(lái)實(shí)現(xiàn)全程自動(dòng)控制目標(biāo)。對(duì)單沖量控制系統(tǒng)及串級(jí)三沖量控制系統(tǒng)的主控制PID參數(shù),采用了設(shè)定值與測(cè)量值偏差的變參數(shù)PID控制,串級(jí)三沖量控制系統(tǒng)的副控制器采用了給水流量及主蒸汽流量修正后的變參數(shù)PID控制。同時(shí)為了加快響應(yīng)速度,對(duì)串級(jí)三沖量的主控PID及單沖量的PID控制器采用了蒸汽流量函數(shù)f(x)模糊控制的前饋補(bǔ)償。
3.3 增加了汽包危急疏水閥的自動(dòng)控制
由于該機(jī)組采用的是定速電動(dòng)給水泵,經(jīng)過(guò)變參數(shù)優(yōu)化后的水位控制能滿(mǎn)足全程啟停的自動(dòng)控制要求。為了能夠在機(jī)組甩負(fù)荷的情況下也能自動(dòng)控制水位,并且保證汽包水位在正常范圍之內(nèi),增加了汽包危急疏水閥的自動(dòng)控制。當(dāng)發(fā)生甩負(fù)荷時(shí),利用汽包的熱慣性及水位的動(dòng)態(tài)特性,自動(dòng)開(kāi)啟汽包危急疏水閥,從底部排放一部分水。此時(shí)由于是從汽包底部放水,對(duì)水的汽化效果影響不大,從而能夠迅速地降低汽包水位。等汽包內(nèi)壓力及水汽化作用穩(wěn)定后,即水位降低到一定值后關(guān)閉危急疏水閥,通過(guò)正常的給水來(lái)控制汽包水位,使汽包水位能控制在正常范圍之內(nèi)。
3.4 優(yōu)化后的甩負(fù)荷試驗(yàn)
汽包水位控制優(yōu)化后,在50%甩負(fù)荷試驗(yàn)時(shí),汽包水位控制在-200 mm到100 mm之間,并且沒(méi)有出現(xiàn)大的水位波動(dòng),運(yùn)行人員不需對(duì)鍋爐汽包水位控制進(jìn)行任何的人工干預(yù),自動(dòng)控制良好,達(dá)到了預(yù)期的效果。水位控制情況如圖6所示。
4 結(jié)語(yǔ)
根據(jù)CFB鍋爐的汽包水位特性,利用串級(jí)三沖量控制及變參數(shù)PID控制技術(shù),采用汽包危急疏水閥自動(dòng)控制對(duì)汽包水位進(jìn)行補(bǔ)充控制,成功實(shí)現(xiàn)了鍋爐汽包水位的全程自動(dòng)控制,保證了機(jī)組在穩(wěn)定運(yùn)行及甩負(fù)荷等危急工況下也能實(shí)現(xiàn)汽包水位的自動(dòng)控制,解決了無(wú)旁路系統(tǒng)設(shè)計(jì)循環(huán)硫化床鍋爐汽包水位控制的難題。

圖6 優(yōu)化后的50%甩負(fù)荷時(shí)汽包水位變化
[1]朱北恒.火電廠熱工自動(dòng)化系統(tǒng)試驗(yàn)[M].北京:中國(guó)電力出版社,2006.
[2]侯子良,劉云川,侯云巖,等.鍋爐汽包水位測(cè)量系統(tǒng)[M].北京:中國(guó)電力出版社,2010.
