基于模糊預測控制的船舶動力定位系統的設計
2012-09-27 01:41:20熊衛衛何祖軍
電子設計工程 2012年3期
熊衛衛,何祖軍
(江蘇科技大學 電子信息學院,江蘇 鎮江 212003)
基于模糊預測控制的船舶動力定位系統的設計
熊衛衛,何祖軍
(江蘇科技大學 電子信息學院,江蘇 鎮江 212003)
在系統分析和研究船舶動力定位系統的基礎上,提出一種基于模糊預測控制的船舶動力定位的方法,設計了模糊預測控制器。首先,在預測控制部分,探討預測模型和反饋校正的設計;在模糊控制部分,研究隸屬函數和模糊規則的具體制定。最后采用工程數據,對該算法和模糊預測控制器進行了仿真驗證和性能評判,結果表明,所設計的控制器能對船舶進行有效的定位。
船舶;動力定位;模糊預測控制;數學模型
動力定位系統是一種船舶依靠自身的推力系統來抵御外界風、浪、流等環境干擾力,從而使船舶固定于海平面的某一固定位置或者沿某一航跡行駛的系統。動力定位技術與傳統的錨泊定位相比,具有機動性強、定位深度不受水深影響、對海床無破壞等優點,在現代海洋開發中起到了越來越重要的作用[1]。
動力定位系統主要由3部分構成:位置測量系統、控制器、推力系統。其中,控制器控制技術的發展代表著動力定位的發展[2]。早期控制器采用傳統的PID控制,現在實際應用最廣泛的是基于卡爾曼濾波的LQG控制方法[3]。隨著計算機技術的發展,計算和處理信息的能力不斷提高,促使智能控制在動力定位中得到廣泛應用。
船舶在海平面上的運動具有非線性強、大時滯、強耦合、大慣性等特點,難以建立精確的數學模型。基于此,本文采用模糊預測控制算法,將模糊控制與預測控制的優勢相結合并運用于動力定位中。
基本思想是,利用預測模型得到系統未來輸出的預測值,將其與設定的目標輸出值進行比較得到預測誤差,并將預測誤差和預測誤差的變化率作為模糊控制器的輸入進行模糊控制器的設計。最后通過仿真驗證了模糊預測控制器具有良好的控制性能。
1 數學模型
船舶在海平面上有6個自由度的運動,動力定位只對其中的縱蕩、橫蕩和艏搖進行控制。為了更好地研究船舶的運動狀態,本文建立兩種坐標系。坐標系XYZ是建立在船體上的坐標系,稱為隨船坐標系,坐標系的原點取在船重心G處;坐標系XEYEZE是固定坐標系,也稱地球坐標系。
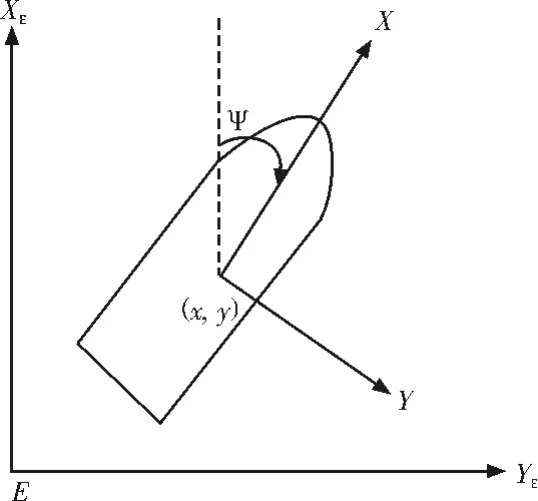
圖1 坐標系Fig.1 Coordinate system
動力定位低頻運動的形式有很多種,文中采用下面形式[4]:


式中,
u,v,r——船舶的縱蕩速度、橫蕩速度和艏搖角速度;
Fx1,Fy1——與u,v有關的水動力;T1是與u,v有關的水動力矩;
Fy2,T2——與u,r有關的水動力和力矩;
Fu,Fv,Tzz——推進器產生的力和力矩;
FxA,FyA,TA——風的力和力矩;M是船舶質量;
mx,my——X,Y軸方向上的附加質量;
Izz——船舶繞Z軸轉動的轉動慣量;
Jzz——船舶繞Z軸轉動的附加轉動慣量。
2 模糊預測控制器
船舶在海平面上的運動是一個很復雜的過程,屬于大時滯系統,而單純的模糊控制是一種“事后調節”的控制方式,所以單純使用模糊控制進行動力定位,難以取得良好的控制效果。
模糊預測控制的實質是模糊決策和預測推理的結合。利用模糊預測控制設計的控制系統框圖2所示。通過預測模型,得出船舶運動下一時刻的位置預測值Yp,將其與期望目標位置Yr進行比較,得出位置偏差E及偏差變化率EC,E和EC就是模糊控制器的兩個輸入量。
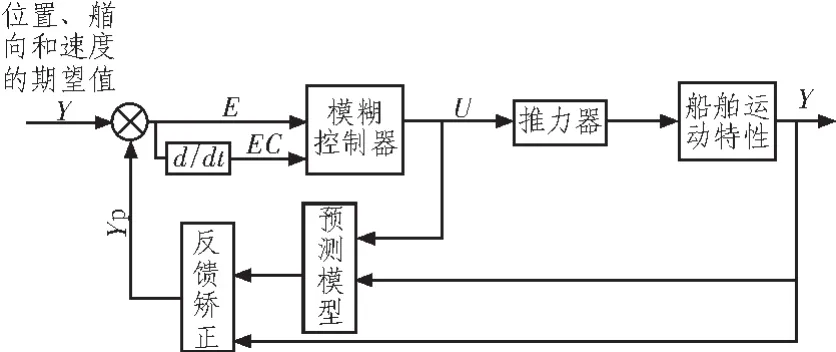
圖2 模糊預測控制系統框圖Fig.2 Block diagram of fuzzy predictive control system
2.1 預測控制
文中所采用的預測控制的思想:根據系統的未來輸入和歷史輸出預測未來時刻的輸出。
設被控對象基于階躍響應預測模型的輸出向量為a=[a1,a2,…,ap],其中,P 為建模時域。 在 k 時刻控制有一增量Δu(k)時,在未來時刻的預測輸出值為:

其中,Y0(k+i)為初始值,i=1,…P。
在k時刻,把控制增量Δu(k)施加與控制對象,利用預測模型得出未來時刻的預測輸出值Ym(k+i),這是一個比較理想的過程。但是在實際應用中,由于模型失配、外界環境干擾以及非線性等未知因素的存在,使得預測值和實際值之間可能會產生誤差。因此,需要利用實時信息進行反饋矯正[5-6]。在k時刻,利用系統的實際輸出y(k)進行反饋矯正。

其中,Yp(k+i)為校正后的預測值,Ym(k+i)為經過預測模型得到的預測值,h為校正向量。
通過以上的計算,可以得出船舶運動下一時刻的位置預測值,由位置預測值和目標值可以得出位置偏差及其偏差變化率的預測值,它們將作為模糊控制器的輸入。
2.2 模糊控制
根據上一節所述,模糊控制器的兩個輸入為船舶位置的預測輸出誤差E及其誤差變化率EC。模糊控制器的輸出為控制力U。E、EC及U的論域均取為[-6,6],狀態詞集取為{負大,負中,負小,零,正小,正中,正大},用代碼表示為{NB,NM,NS,ZO,PS,PM,PB}。 輸入、輸出的隸屬度函數采用簡單而又具有一般性的三角函數,隸屬度函數曲線如圖3所示。
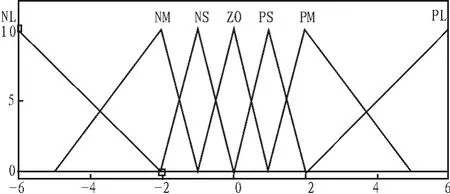
圖3 輸入(出)變量隸屬度函數的分布圖Fig.3 Membership functions of the input and output fuzzy sets
模糊控制規則庫采用“if…then…”的形式,對于船舶的縱蕩、橫蕩和艏搖。采用相同的模糊控制規則表,如表1所示。
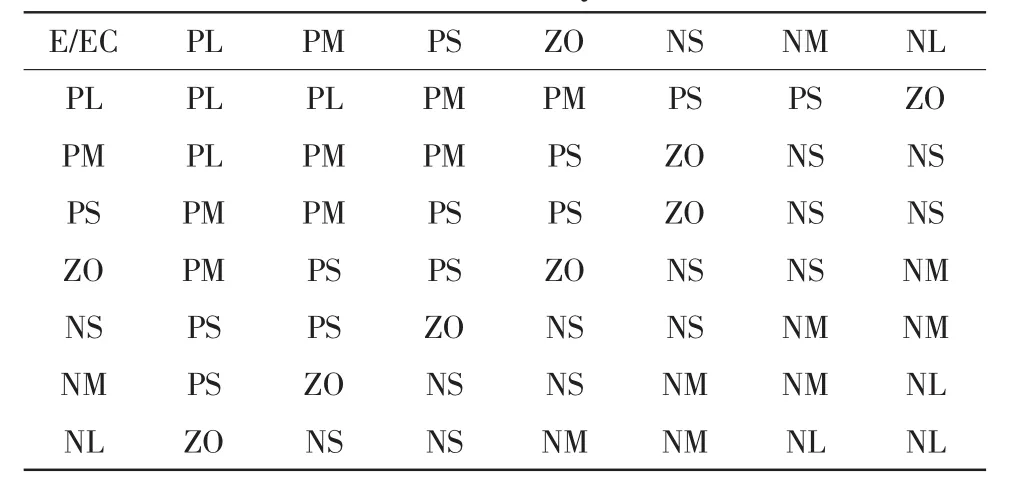
表1 模糊控制規則表Tab.1 The fuzzy rules
對于模糊控制器的輸出,采用加權平均法進行解模糊[7]。
3 仿真結果
現以某水面船位研究對象,該船總長為25.5 m,寬為8.5 m,質量為 46 kg,出水量為1.81 m,排水量為38 t。
文中假設船舶的初始位置為(0 m,0 m,0°),定位點為(20 m,20 m,45°)。在靜水條件下的仿真結果如圖4、5和6所示。
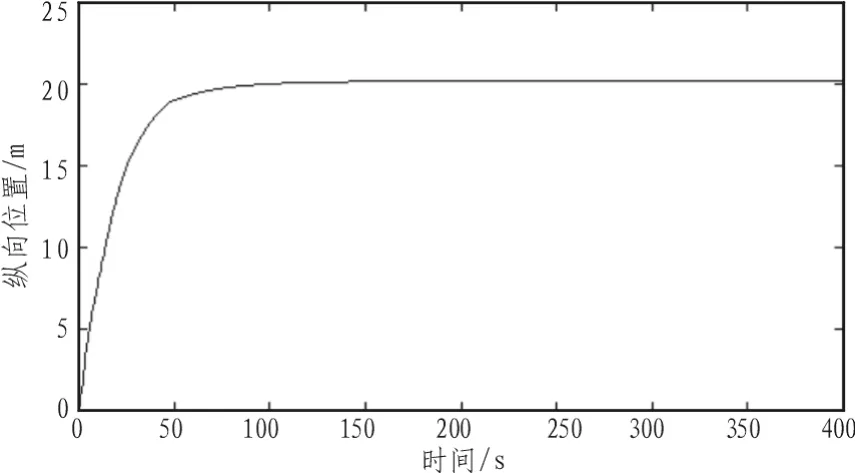
圖4 縱向位置仿真曲線Fig.4 Simulation result showing in surge direction
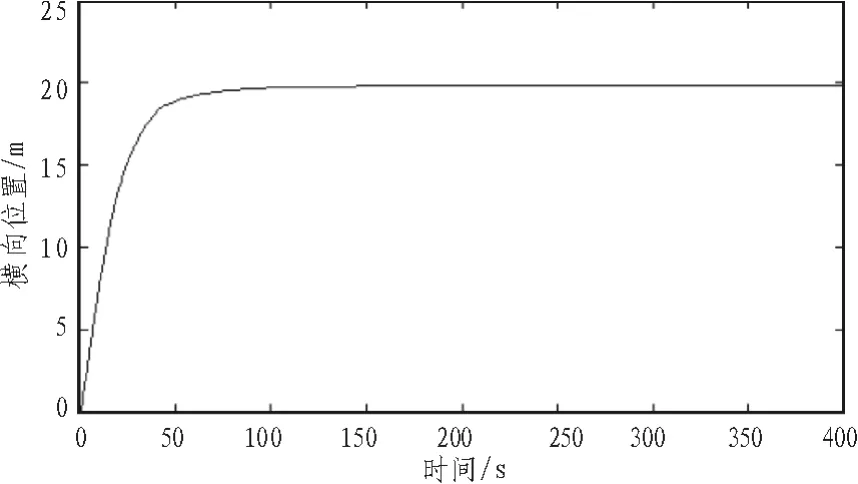
圖5 橫向位置仿真曲線Fig.5 Simulation result showing in sway direction
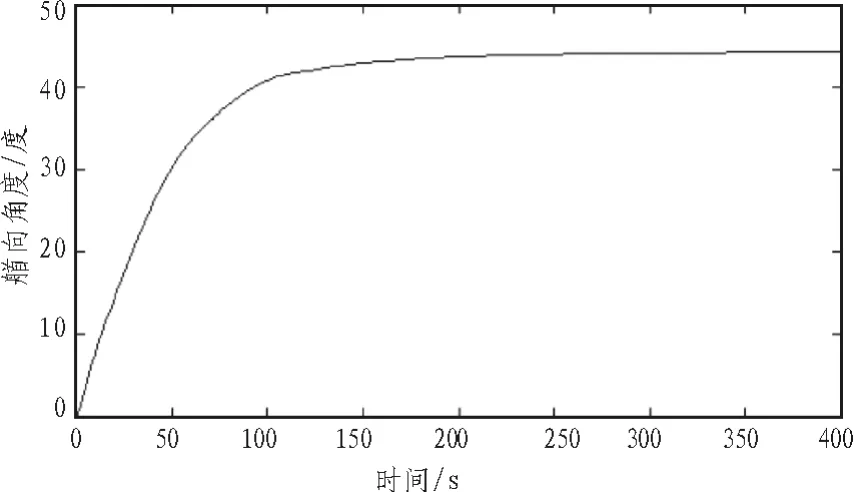
圖6 艏向角度仿真曲線Fig.6 Simulation result showing in yaw direction
從仿真結果可以看出,基于模糊預測控制算法設計的控制器,在縱向、橫向和艏搖3個方向上都達到了很好的控制效果,使船舶準確的從初始位置(0 m,0 m,0°)到達目標定位點(20 m,20 m,45°),達到了進行實時控制時理想的預測性能,穩態精度較高,使動力定位系統具有良好的魯棒性和穩定性。
4 結 論
文中利用模糊控制與預測控制混合控制算法,設計了船舶動力定位的控制器,針對某船進行了仿真研究。仿真結果表明,控制器結合了模糊控制和預測控制的優點,達到了良好的控制效果。隨著我國海洋事業的發展,動力定位控制技術的研究將會得到更多的重視。為了得到更先進、更成熟的控制方法,多種智能控制方法相融合的控制算法,將是動力定位控制技術研究的熱點。
[1]趙志高,楊建民,王磊,等.動力定位系統發展狀況及研究方法[J].海洋工程,2002(2):91-97.
ZHAO Zhi-gao,YANG Jian-min,WANG Lei,etal.The development and research method of dynamic positioning system[J].The Ocean Engineering, 2002(2):91-97.
[2]Fossen T.Guidance and control of ocean vehicles[M].New York:Wiley,1994.
[3]余培文,陳輝,劉芙蓉.船舶動力定位系統最優控制器的仿真設計[J].船海工程,2009,38(4):118-120.
YU Pei-wen,CHEN Hui,LIU Fu-rong.Simulation of optimal controller for ship dynamic positioning system[J].Ship&Ocean Engineering,2009,38(4):118-120.
[4]童進軍.一種基于模型的動力定位控制系統的研究[D].上海:上海交通大學,2003.
[5]李葵芳.模糊預測控制算法研究與應用[D].東營:中國石油大學,2008.
[6]丁寶蒼.預測控制的理論與方法[M].北京:機械工業出版社,2008.
[7]張桂蘭,鄧志良.模糊控制器在船舶動力定位系統中的應用及改進[J].中國造船,2005,46(4):26-30.
ZHANG Gui-lan,DENG Zhi-liang. Application and improvement of fuzzy controller in ship dynamic postioning systems[J].Shipbuilding of China,2005,46(4):26-30.
Design of ship dynamic positioning systems based on fuzzy predictive control
XIONG Wei-wei,HE Zu-jun
(School of Electronics and Information,Jiangsu University of Science and Technology,Zhenjiang212003,China)
A fuzzy predictive control scheme is proposed in dynamic positioning and a fuzzy predictive controller was designed base on the study of dynamic ship positioning.First, in the predictive control part, the designs of predictive model and correcting on line of predictive control are discussed.In the fuzzy control part,membership functions and fuzzy rules of fuzzy control are discussed.Evaluation of the algorithms and fuzzy predictive controller is made with project date.Simulation results show that the fuzzy predictive controller can hold the position and heading effectively.
ship; dynamic positioning; fuzzy control; predictive control
U664.81
A
1674-6236(2012)03-0121-03
2011-11-15 稿件編號:201111085
熊衛衛(1986—),女,山東德州人,碩士研究生。研究方向:船舶動力定位系統的智能控制。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國船檢(2017年3期)2017-05-18 11:33:09
