系留氣球拉力傳感器數字濾波算法研究
2012-09-30 02:08:54段玲琳葉明傲
火控雷達技術 2012年1期
關鍵詞:信號
段玲琳 葉明傲
(中國電子科技集團公司第38研究所 合肥 230088)
1 引言
在系留氣球系統中拉力傳感器安裝在系留部件上,如圖1所示,用于測量纜繩的張力,且其輸出靈敏度為mV/V的弱模擬信號。纜繩的張力與系留氣球放飛的狀態和環境風速有密切的關系,張力超限必須回收系留氣球,但是如果發生虛警而回收系留氣球會影響任務的完成,所以纜繩張力測量的準確與否密切關系到系留氣球放飛的安全性和工作效率。
由于系留氣球是一種浮地的系統,抗干擾能力差,而且系留氣球體積龐大,拉力傳感器的供電和信號采集都必須采用長線傳輸方案,電纜在走線過程中不可避免會出現模擬信號線、數字信號線、控制線和電源線在一個線束中排線的情況,這樣線間耦合產生傳輸過程的干擾[1]。拉力傳感器工作中還受到主要來自放飛現場的雷達、無線電通訊設備、等的電磁輻射脈沖干擾。
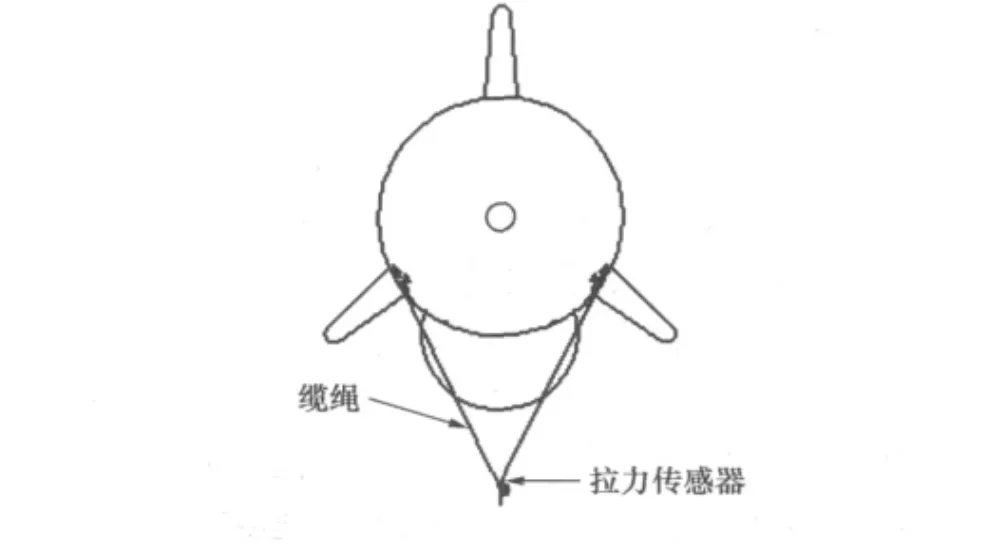
圖1 拉力傳感器安裝位置
濾波方法是抑制干擾的一種有效途徑,可利用硬件濾波器電路或軟件濾波器算法提高測試數據的準確性。硬件濾波措施是使用較多的一種方法,技術比較成熟,但同時也增加了設備,提高了成本,而且電子設備的增加有可能帶來新的干擾源。而軟件濾波算法不需增加硬件設備,可靠性高,功能多樣,使用靈活,具有許多硬件濾波措施所不具備的優點,當然它需要占用一定的資源。
2 常用的數字濾波方法
2.1 針對隨機干擾的濾波方法
2.1.1 限幅濾波法
根據經驗確定出兩次采樣的最大偏差Δ,若先后兩次采樣差的絕對值大于Δ,表明輸入為干擾信號,應剔除;差的絕對值若小于或等于Δ,表明沒有受到干擾,本次采樣值有效。這樣可以濾去隨機干擾和傳感器不穩定而引起的誤差[2]。
2.1.2 中位值濾波法
連續采樣N次(N取奇數),把N次采樣值按大小排列,取中間值為本次有效值。這樣能有效克服因偶然因素引起的波動干擾,對變化緩慢的被測參數有良好的濾波效果[3]。
2.2 針對抖動的濾波方法
2.2.1 算術平均濾波法
連續取N個采樣值進行算術平均運算。N值較大時,信號平滑度較高,但靈敏度較低,N值較小時,信號平滑度較低,但靈敏度較高[4]。適用于在某一數值范圍上下波動受到隨機干擾的信號進行濾波,對于測量速度較慢或要求數據計算速度較快的實時控制不適用[5]。
2.2.2 消抖濾波法
采樣當前值持續與當前有效值不等,則采樣當前值有效。可能會將干擾值當作有效值導入系統。
2.3 針對脈沖式干擾的濾波方法
中位值平均濾波法:又稱防脈沖干擾平均濾波法。連續采樣N個數據,去掉一個最大值和一個最小值,然后計算N-2個數據的算術平均值。可消除由于脈沖干擾所引起的采樣值偏差,測量速度較慢。
3 信號分析
系留氣球整個放飛過程分為系留、爬升、滯空、回收、系留這五個過程。系留中由于纜繩不受力,所以拉力傳感器的理想輸出為0;爬升過程中纜繩從松弛狀態突然繃緊受力,拉力傳感器的輸出突然增大,然后隨著爬升的高度緩慢增大;在滯空過程中纜繩的張力受到環境風速和風向的影響在一定范圍內波動;回收過程是爬升的逆過程,在轉到系留過程的瞬間纜繩張力突然減為0。從整個放飛過程來分析,拉力傳感器的輸出存在突變的過程,所以在數字濾波方法的選擇中既要濾去干擾信號又必須在系統允許的時間內保持對突變信號的敏感度,否則張力值不能反映放飛的真實狀態。
系留氣球主要完成對地或者對低空的偵查任務,不可避免會受到雷達信號的干擾。雷達信號一般為占空比小于20%的周期性脈沖信號,所以針對此種干擾信號的特點,數字濾波算法必須能夠濾除脈沖干擾信號。
系留氣球是一個浮地的系統,長期的滯空環境導致電子設備上積累了大量的電荷無法釋放,所以系留氣球的電子設備的內帶電現象非常嚴重。此外系留氣球的電訊系統是一個混合系統,包含了傳感器輸出的模擬或者數字的弱信號以及無線通信的高頻信號,所以其所謂的地線上的干擾也相當嚴重。
4 數字濾波的應用
以上提到的各種濾波算法僅對某些特定干擾信號有抑制作用,針對系留氣球上多種復雜干擾需要采用多種濾波組合的算法實現綜合濾波效果。
拉力傳感器連續工作的過程主要是系留氣球的滯空過程,纜繩張力的總體變化比較平緩,在短時間內不會有很大的波動,限幅可以濾去部分脈沖干擾,所以這里采用“限幅平均濾波法”作為濾波算法的基礎,但做一定的改進。
具體算法步驟如下:
A.首先根據工程經驗對限幅的幅度范圍進行選定[-a,a];
B.然后建立遞推平均隊列 q1=(d1,d2,…,dn),隊列長度固定為n,將每次采樣到的新數據放入隊尾,并扔掉原來隊首的一次數據,把隊列中的n個數據的算術平均值作為當前有效值a1;
C.建立超差隊列 q2=(c1,c2,…,cm),隊列的長度固定為m;
a.當前采樣值與q1的隊尾值進行比較:
·如果差在[-a,a]內當前采樣值進q1隊列,把隊列中的n個數據的算術平均值作為當前有效值ai,并且清除q2隊列里所有的值;
·如果當前采樣值與q1的隊尾值進行比較,差超出[-a,a]范圍,當前采樣值進q2隊列,將q1隊列的隊尾值再次填充進q1隊列,當q2隊列滿時,通過均方根來判斷超差隊列的數據是否有效,因為均方根可以反映數據的聚散程度。
求q2的平均值Eq2:

求q2的均方根Dq2:
其中B作為均方根的參考值,如果Dq2≥B說明超差隊列內的數據為干擾數據,不可取;如果Dq2≤B說明實際數據確實有很大變化,將當前采樣值放入q1隊列的隊尾,并將超差隊列q2內所有數據清除;
b.如此循環濾波,得到濾波有效值序列(a1,a2,…,ai)。
在實際放飛的過程中,風速存在高頻分量時纜繩張力真實存在一定的中等頻率分量,所以在對遞推平均隊列q1=(d1,d2,…,dn)隊列長度n的選擇時這個頻率值必須作為參考依據;為了保證濾波算法對信號的良好跟隨性,對于超差隊列q2=(c1,c2,…,cm)隊列的長度m的選擇也至關重要。
以某型系留氣球某次放飛的數據為依據利用Matlab根據上述算法仿真計算,這里取a=50,n=5,m=5,B=5,原始數據如圖2中虛線所示。
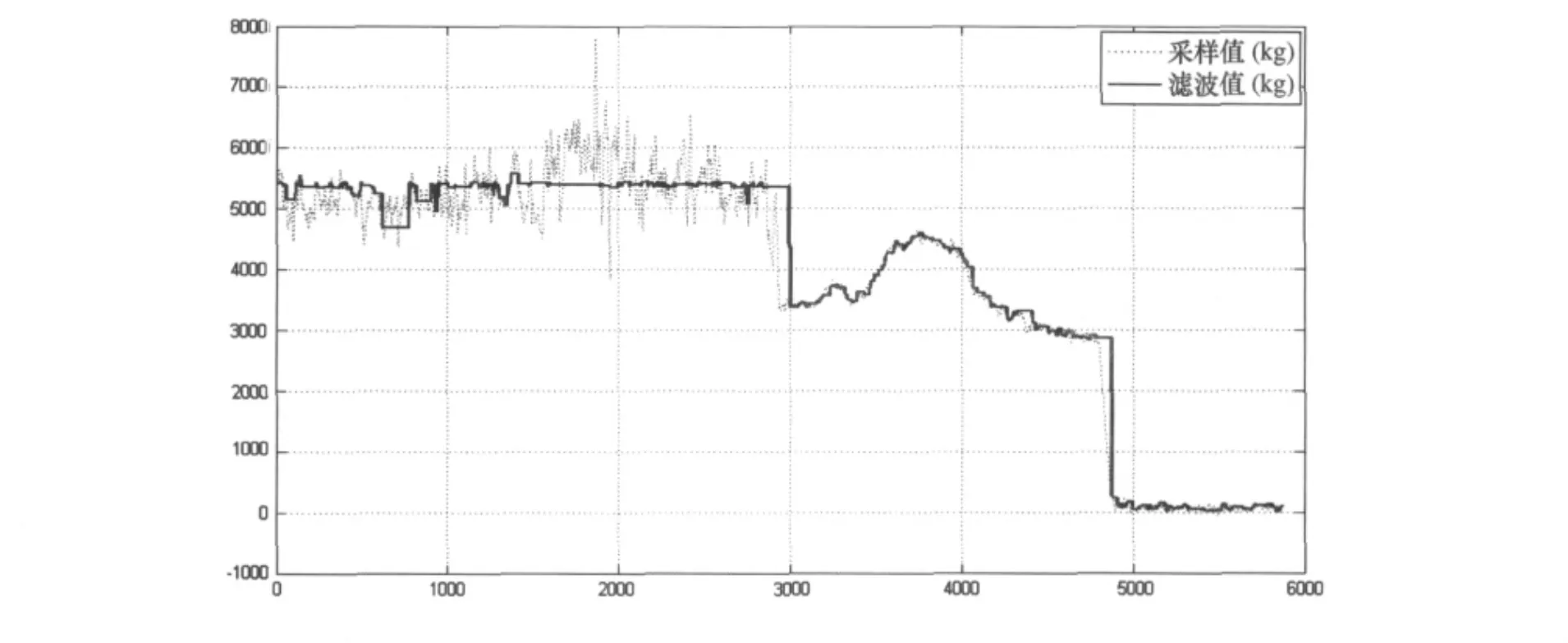
圖2 濾波值與原始值比較圖
從圖2可以看到3000點以前有很強的脈沖干擾信號,4900點左右有明顯的突變。
濾波后的數據如圖2實線所示。從圖2上很明顯看到在3000點以前數字濾波對信號干擾的濾除作用良好,同時數字濾波對于在4900點左右的突變信號也有較好的跟隨性。
5 結束語
在針對拉力傳感器輸出所受的復雜脈沖干擾濾波過程中,改進的限幅平均濾波算法在仿真驗證和實際應用中都取得了很好的濾波效果,同時還能夠反映源信號的真實信號特性。
[1]郝慧萍,高明.航天器環境試驗設備計量測試系統中的電磁干擾及其抑制綜述[J].宇航計測技術,2007,27(2):55 -57.
[2]王慶河,王慶山.數據處理中的幾種常用數字濾波算法[J].計量技術,2003(4):53-54.
[3]鄭濤,石秀華,許暉.數字濾波新方法嘗試與驗證[J].測控技術,2004,23(4):19 -20.
[4]任克強,劉暉.微機控制系統的數字濾波算法[J].現代電子技術,2003,(03).
[5]趙毅.數字濾波的算術平均法和加權平均法[J].儀表技術,2001(4):41,44.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06