基于飛行品質模擬器的控制律開發技術
2012-10-11 02:30:22王躍萍王敏文戎曉娟
教練機 2012年3期
王躍萍,王敏文,戎曉娟
(飛行自動控制研究所,陜西西安 710065)
0 引言
飛行模擬試驗使控制律設計者有機會與飛行員進行面對面的溝通與交流,深入地了解飛行過程中飛行員所采用各種操縱動作的目的、如何利用不同的操縱動作來評價飛行品質的優劣,從而為控制律設計工程師的設計工作提供具體指導,增強控制律設計的主動性和前瞻性。此外,通過模擬器中的飛行感受,飛行員對控制律提出種種改進意見和建議,對控制律設計者提出了更高的要求。
基于品模試驗的迭代優化過程,是控制律設計逐步完善的過程,它不僅提高了控制律設計質量,也使控制律設計水平得以提升。
1 開發環境
基于飛行品質模擬器的飛行控制律開發與驗證系統,通過使用新技術、標準軟件接口、動態鏈接庫以及數字可調電動人感系統,生成飛行視景,使飛行模擬器仿真技術支持“人在回路中”的控制律迭代優化,成功實現設計、仿真、評價、優化一體化。
整個開發環境的連接以網絡為基礎,組成如圖1所示。由圖可見,主控機通過I/O接口采集飛模座艙的飛行員操縱(駕駛桿、腳蹬)指令、油門信號和相關的模態控制信號,并將采集信號通過網絡集線器傳輸給飛機動力學仿真機,動力學仿真機根據主控機的信號進行控制律以及飛機方程的解算,并將解算結果(飛機運動參數)通過網絡傳輸給三通道視景、儀表仿真機和主控機,主控機再將飛機運動參數信息通過同軸網絡傳輸給座艙控制仿真機,由它控制飛模座艙的運動。
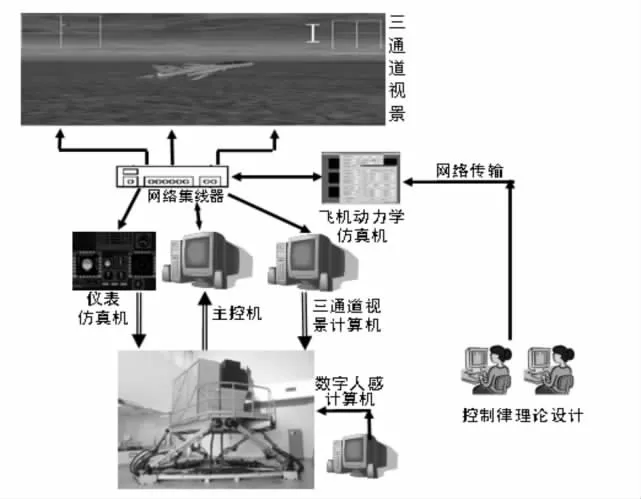
圖1 飛模系統環境示意圖
2 控制律開發與驗證
2.1 飛行品質評定
在飛行品質評定試驗中,飛行員按照庫伯-哈伯相關規定動作及其評分標準,依次進行評定、記錄,并將評分結果與控制律設計者互動交流、討論。設計者根據飛行員的評定意見迭代優化控制律構型、參數,直至飛行員滿意。
根據飛行員的評定需要,可預先選擇給定的飛行狀態(H、M)或模擬機場地面起飛過程。給定飛行狀態情況下,飛機的初始狀態為特定高度、速度,通過規定的操縱動作進行品質評定,試驗評定效率高;而模擬地面起飛則可以對滑跑、抬前輪等過程的控制律品質特性予以評估。
為充分揭示控制律設計與飛機飛行品質的相關性,根據眾多試飛員的經驗,選定了如下典型動作及試驗任務,分別說明如圖2。
2.1.1 推、拉俯仰角
要求:以一定的速度推或拉駕駛桿,使飛機盡快穩定在給定的俯仰角。
目的:檢查飛機的縱向跟隨響應及預測性。

圖2 典型動作及試驗任務
2.1.2 快速轉彎進入
要求:飛機在平飛狀態,盡可能快壓桿,使飛機形成一定坡度,并盡快建立起給定過載。
目的:檢查飛機的水平機動能力,特別是由平飛狀態向盤旋狀態轉換時飛機操縱的協調性、水平方向建立過載的能力。
2.1.3 收斂轉彎
要求:保持M數為常值,允許損失高度,先壓桿使飛機形成一定坡度,然后回桿,以8~10秒均勻拉桿,或使α、ny達到給定值。
目的:檢查α、ny隨桿力(或桿位移)的變化情況,桿力(或桿位移)梯度、最大操縱力,也可檢查α、ny的限制器工作情況。
2.1.4 BTBθ
要求:保持飛機俯仰姿態角不變,盡可能快地從左坡度轉入到右坡度(兩邊值相等),或從右到左。
目的:檢查橫向操縱協調性,動態過程中縱、橫向是否有耦合,或舵面是否有干擾。
2.1.5 BTBG
要求:壓大坡度后,迅速拉桿,保持過載不變。目的:檢查過載響應穩態保持特性。
2.1.6 協調側滑
要求:蹬舵和壓桿組合操作,保持航向不變,一個方向至少飛三個側滑角。
目的:檢查橫航向靜穩定性,橫航向桿舵操縱的協調性。
2.2 控制律優化改進
在品模試驗中,飛行員憑借豐富的飛行經驗,提出了需求、改進意見和建議。經過多輪試驗與交流,控制律設計者迭代優化控制律參數與結構,確保最終的飛行品質令飛行員滿意。伴隨著某型高級教練機控制律開發過程,進行了多輪飛行品質模擬試驗。很多涉及操縱習慣、飛行品質、飛行安全的問題都是設計者與飛行員共同解決的,下面給出幾個典型問題的分析。
2.2.1 個別狀態出現蹬舵反傾斜現象
美國軍用規范(MIL—F—1797)認為蹬舵反傾斜增加了駕駛員操縱負擔。規范要求飛機對于等級1和等級2,單獨利用方向舵腳蹬力應能產生坡度,且要求左腳蹬力產生左滾轉,右腳蹬力產生右滾轉。蹬舵反傾斜雖然不會嚴重危及飛機的飛行安全,但它對飛行員來說是難以接受的。
通過某型教練機的品模試驗,飛行員在個別點感受到了蹬舵反傾。經分析,是由于控制律開發者在橫航向設計中有一路增益配置不合適所造成的。這樣,當蹬右舵時,方向舵右偏,機頭右偏,產生負的側滑角、正的側向過載。正的側向
過載帶給副翼的正向偏轉使飛機有左滾趨勢
2.2.2 減輕飛行員負擔
傳統控制律通常在A種飛行階段采用比例加積分構型而在C種飛行階段采用切斷積分器的比例式控制。這是因為C階段若采用比例加積分構型,會導致精確著陸拉平比較困難,駕駛員必須推桿著陸。在著陸接地時,操縱不當容易引起接地彈跳趨勢。但是,比例式控制律要求飛行員施加較大帶桿力,增加飛行員的工作負荷,使他沒有足夠集中的精力完成其它任務。
通過反復分析探討,綜合論證了兩種控制律構型的利弊,最終在起落階段采納了飛行員建議:一定攻角范圍內,實施比例積分式控制。后續的品模試驗表明:這種控制律構型既保證在規定攻角范圍內的“中性速度穩定性”功能,又滿足飛機下滑過程中要求的較小帶桿量,減輕了飛行員的工作負荷,提高了C種飛行階段的飛行品質。后續的飛行試驗也更進一步的驗證了這一點。
2.2.3 對飛行員的組合操縱增加保護實現無憂慮操縱
飛機本體縱向與橫航向運動存在耦合,在大攻角及組合操縱時尤為顯著,為了抑制大攻角及組合操縱時的非線性氣動力導致的強耦合,確保飛行安全,通過品模試驗研究,在控制律中設置了多項安全防范措施,并得到飛行員小組的認可。
例如:由于某型教練機方向舵效率比較高,在蹬舵壓反桿(滿桿)操縱時出現發散現象,為了有效地遏止這種情況,一方面在航向控制回路設置了隨飛行狀態調參的增益,適當減小方向舵的偏度;另一方面在橫向回路隨蹬舵量的增加降低指令增益,減小滾轉速率指令,使飛行員能夠無憂慮操縱。
2.2.4 其它方面的迭代優化
控制律中有很多參數、邏輯主要由操縱品質與飛行安全決定,這就更是需要通過品模試驗中飛行員與設計方案的磨合、選優,下表給出幾個典型事例。通過飛機操縱特性和試飛員經驗,給出新的改平策略,見圖3。
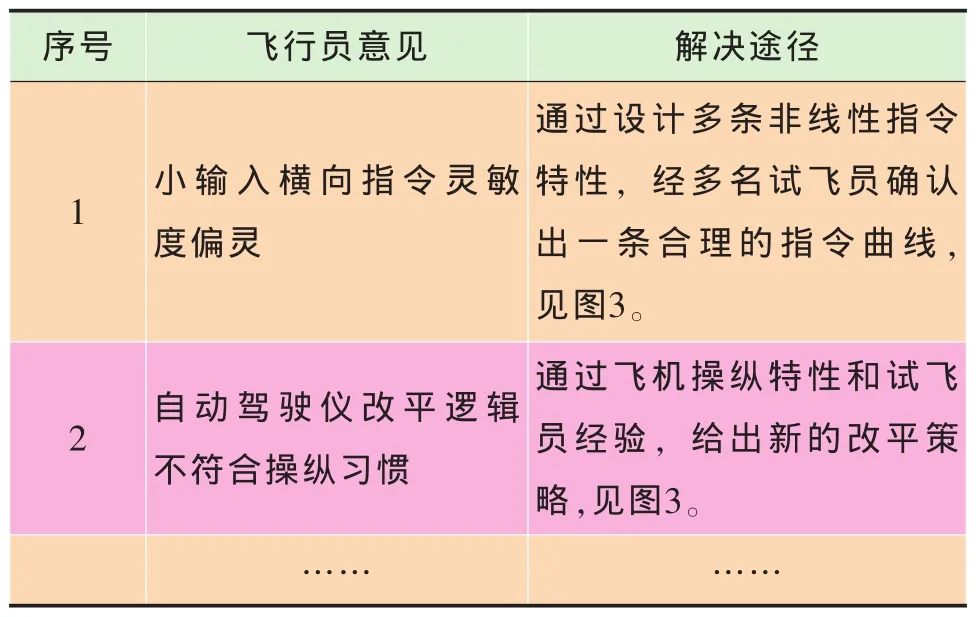
表1 飛行模擬試驗迭代優化的相關內容
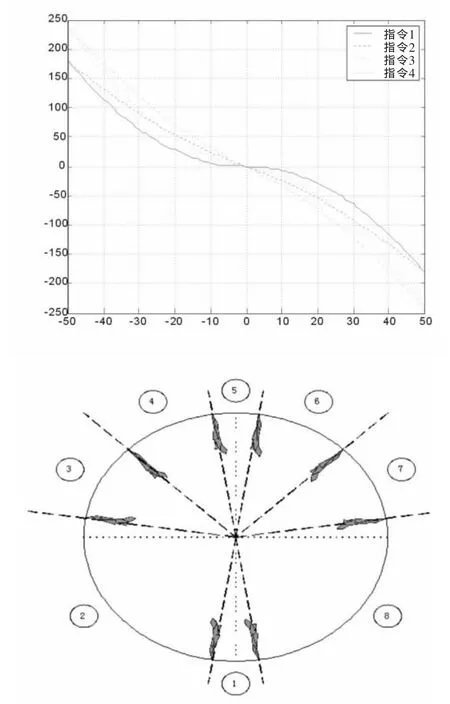
圖3 通過人機閉環試驗確定合適的桿指令梯度、自動改平邏輯
3 結論
控制律設計與優化是電傳飛行控制系統研制關鍵內容之一,與飛機飛行品質和飛行安全密切相關。在基于飛行品質模擬器的飛行控制律設計開發過程中,通過將飛行員引入控制律設計開發團隊,借助飛行員豐富的飛行經驗,不斷迭代優化控制律設計,獲得滿足需求的高性能控制律,使電傳飛機達到滿意的飛行品質要求。基于飛行品質模擬器的飛控系統控制律設計開發,縮短了電傳系統研制周期,提高了全機飛行品質和飛機性能,使電傳飛行控制系統設計水平得以提升,也實現了從過去“我們做什么用戶用什么”到“用戶需要什么我們做什么”理念的轉變。
[1]GJB 185-186,有人駕駛飛機(固定翼)飛行品質[S].
[2]周自全,趙永杰,空中飛行模擬與電傳飛機飛行試驗[J],飛行力學,2005(1):19-22.
[3]張勇,模擬器在飛行控制系統開發中的應用[J],系統仿真學報,2011(23):142-147.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
環球時報(2022-05-30)2022-05-30 15:16:57
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
當代陜西(2019年11期)2019-06-24 03:40:28
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
Coco薇(2017年5期)2017-06-05 08:53:16