基于SIFT算法的交通標志識別
2012-10-12 13:28:38李新,禹翼
制造業自動化 2012年5期
李 新,禹 翼
LI Xin1, YU Yi2
(1.桂林理工大學 信息科學與工程學院,桂林 541004;2.桂林理工大學 機械與控制工程學院,桂林 541004)
0 引言
近半個世紀來,隨著城市化的進展和汽車的普及,交通運輸問題日益嚴重,交通阻塞、交通事故頻繁發生,交通環境不斷惡化。尤其近十多年來,無論是發達國家還是發展中國家,都不同程度地受到交通問題的困擾。如何保障公路交通的安全和提高運輸效率,各國將研究的重點從擴展路網規模逐步轉移到集通信、檢測、控制和計算機技術與一體的智能交通系統的研究上來。基于視覺的車輛導航技術作為智能交通系統研究的一個重要的分支領域,在智能交通系統的應用中有三個方面:l)道路識別;2)碰撞識別;3)交通標志識別。前兩方面研究較多,并取得許多好的結果,但在交通標志識別方面研究較少。由于交通標志被設計成特殊的顏色和形狀以易于人眼的識別,所以往往不受人們的重視并把它作為智能化的技術來研究,但隨著私家車的日益增多,汽車已成為我們日常生活的一部分,有時因為天氣原因能見度低,司機新手上路,打手機,被路邊無處不在的廣告干擾,疲勞駕駛甚至酒后駕駛等原因,忽視交通標志而引發的交通事故頻繁發生。如果有一套自動交通標志識別裝置作為輔助駕駛系統,適時地提醒司機前方的路況,幫助司機對車輛進行控制(如遇限速標志自動減速等),就能夠大大提高行車的安全性。交通標志自動識別系統可以應用到許多領域,比如軍用和民用無人駕駛車輛研究項目中,最重要的就是它的“視覺系統”,它們能自動認清道路和環境,避讓障礙,甚至可以規劃路徑;在未來的汽車自動、半自動駕駛系統中交通標志的自動識別是其控制系統的必要組件之一;在電子交通地圖中,交通標志自動識別給車輛在交通圖中的定位提供必要信息;另外還可用于盲人出行輔助系統中。可見交通標志自動識別的研究具有廣泛的意義。
1 SIFT算子
SIFT(Scale Invariant Feature Transformation)算法是由David Lowe于1999年提出的基于圖像局部特征的算法,并在2004年進行了完善。SIFT算子是一種具有尺度不變性算法,它對圖像的尺度變化、水平旋轉、平移以及光照變化具有保持不變的特性,同時對于圖像經度與緯度傾斜變化以及噪聲也具有一定的穩定性,是目前比較流行的特征檢測算子。SIFT特征點檢測算法己經被廣泛應用于很多領域。SIFT算法的主要步驟如圖1所示。

圖1 SIFT算法流程圖
SIFT 特征點的提取流程:
l)尺度空間的生成:同一幅圖像在不同尺度下的圖像的有機集合為尺度空間,即給同一幅圖像添加了一個新的坐標因子。建立尺度空間即建立一幅圖像尺度從大到小的尺度的若干幅圖像的有機集合。經過Koenderink 和Lindeberg 高斯卷積核是尺度空間的唯一線性核,通過高斯核平滑圖像,并進行采樣。并建立高斯金字塔, 在金字塔中計算空間局部極值,將待檢測的點與其所在階層的像素點進行比對,如果是極值,則認為是SIFT 候選點。
高斯函數如式(1)所示。其中,σ為高斯正態分布的方差:


高斯金字塔相鄰兩尺度空間函數之差形成Dog函數,其公式如下:

2)確定特征點位置:為了計算關鍵點的偏移量,獲得亞像素定位精度,可以通過二階Taylor展開式來計算得出。由于DOG算子能夠產生較大的邊緣響應,且對噪聲比較敏感,因此,在計算的同時為了剔除差異小的點可以通過設置閾值來實現,并用Hessian矩陣技術剔除不穩定的邊緣響應點。為了對特征點的位置和尺度精確確定,可以采用對局部極值點進行三維二次函數擬合。局部極值點在尺度空間函數處的泰勒展開式如公式(4)所示。

通過附近區域的差分來近似可求出公式(4)中的一階和二階導數,列出其中的幾個,如式(5)所示,其他以此類推。

其中,k為當前層,k-1為下一層,k+1為上一層。
精確的極值位置Xmax是通過公式(4)為0求導得出,如公式(6)所示:

在特征點位置確定完的同時,還需刪除已提取的低對比度特征點和一些不太穩定的邊緣響應點,以增強匹配的穩定性和提高抗噪能力。
針對去除低對比度的特征點方面,可以把公式(6)代到公式(4)中,取前兩項,得到公式(7):


通過公式(8)計算出主曲率。根據文獻[22],由于D的主曲率與H矩陣的特征值成比例,因此,只需求二者比值r,具體的特征值不需求出。設最大幅值特征為α,次大幅值特征為,那么比例,如公式(9):

3)確定特征點尺度:對于確定特征點方向,可以通過統計相鄰26個像素點的梯度方向分布所指定的方向進行判定。為了保持算子的旋轉不變性,可以通過在匹配時把圖像旋轉到統一的方向模式。特征點(x,y)處的梯度模值和主方向如下公式:

其中m(x,y)為(x,y)處的梯度模值,θ(x,y)為(x,y)處梯度的主方向,每個特征點各自所在的尺度為L。
在實際計算過程中,特征點方向的確定是通過方向直方圖來解決的。即對特征點鄰域內相鄰各像素點方向進行統計,指向方向最多的方向就是該特征點的主方向。
到此為止,對于特征點的提取工作已經完成,每個特征點都具有了三個描述信息,也就是特征點的位置、方向、大小。那么同時也就可以通過這些描述信息確定含有它們的SIFT特征區域。
2 系統設計(如圖2所示)

圖2 系統流程圖
3 實驗
1)粗分類:
從實地拍攝到的場景中,基于顏色與形狀特征對場景圖進行粗分類,找出含有交通標志的區域。圖3(a)中為實地拍攝的交通標志,圖3(b)為粗分類后提取的感興趣區域。

圖3 實拍交通標志及提取后效果圖
2)精分類:
在粗分類找出含有交通標志區域的基礎上,采用SIFT算子提取關鍵點特征,并與其對應的交通標志子數據庫圖像特征子空間進行多層次篩選匹配,得到如下結果,圖4(a)、(b)分別為上圖中兩個交通標志的特征匹配圖。
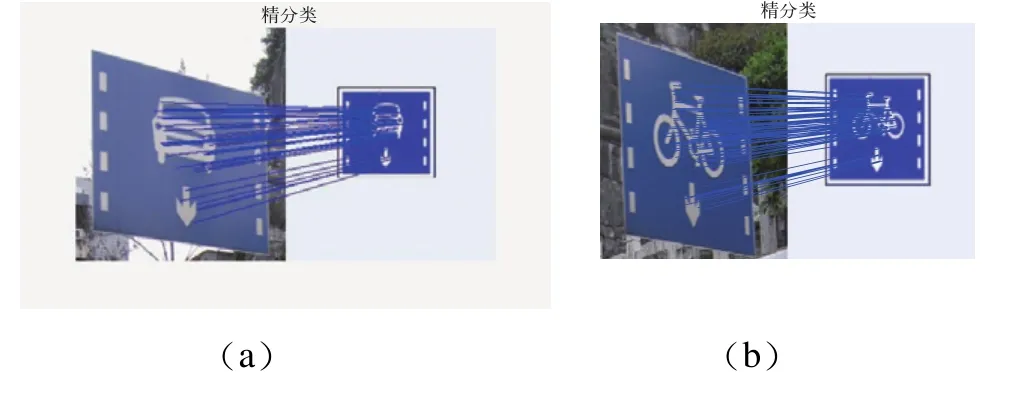
圖4 交通標志匹配圖
為了便于駕駛者識別,我們最后的視圖輸出窗口完善成如圖5所示,在窗口右側放入事先自制的交通標志子數據庫模型,在計算機進行識別處理之后,場景圖的周圍就會出現系統識別出的交通標志對應的模板圖形,以便識別,識別結果如圖5所示。

圖5 識別結果輸出
4 結論
通過大量實驗圖片效果及數據顯示,本文中設計的交通標志識別系統在實時環境中有著高識別能力,即使拍攝的交通標志角度傾斜,仍可以識別出來。此外,即使交通標志部分被窗戶和燈柱等物體遮住,也可以被識別出來。因此,很清楚地展示了本文算法在實際環境中是有效的。
[1]許少秋.戶外交通標志檢測和形狀識別[J].中國圖象圖形學報,2009,14(4):707~711.
[2]李祥熙,張航.交通標志識別研究綜述[J].公路交通科技應用技術版,2010,(6):253~257.
[3]李玲玲,李翠華,曾曉明,等.基于Harris-Affine和SIFT特征匹配的圖像自動配準[J].華中科技大學學報(自然科學版),2008,36(8):13~16.
[4]J.Matas,O.Chum,M.Urban,et al.Robust wide-baseline stereo from maximally stable extremal regions. Proceedings of the British Machine Vision Conference,2002.384~393.
[5]巨西諾,孫繼銀.一種改進的基于 MSER算法的不變量提取算法[J].貴州工業大學學報(自然科學版),2008,37(6):49~52.
[6]朱利成,姚明海.基于SIFT算法的目標匹配和識別[J].機電工程,2009,26(4):73~75.
[7]陳信華.SIFT特征匹配在無人機低空遙感影像處理中的應用.地礦測繪[J],2008,24(2):10~12.
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
