LonWorks工業網絡測控系統時延控制
2012-10-12 13:28:56于建明
制造業自動化 2012年5期
關鍵詞:系統
于建明
YU Jian-ming
(淮安信息職業技術學院,淮安 223003)
0 引言
隨著微電子技術的發展、設備智能化水平的不斷提高,人們對人與設備之間的信息交流和設備與設備之間的信息交流也提出了越來越高的需求。基于Web的LonWorks遠程監控系統采用瀏覽器以簡單友好的操作方式實現對生產現場數據的遠程監視和控制,可以極大提高企業自動化水平,提高企業設備的維護管理水平。但對傳送的信息量不大,但強調實時性的系統,其前向通道和反饋通道同時存在網絡時延及其不確定性的問題,將會影響系統的動態性能。時延及其變化進一步增大時,還會導致系統不穩定。這一問題是阻礙遠程控制采用因特網的主要原因。
為了解決這一問題,一些新的控制理論和方法已經被提出。Yang等[1]提出了如何系統地設計基于互聯網的過程控制系統,并給出了該系統可能的結構基優缺點。Nillson采用隨機最優控制的方法,在網絡時延小于一個采樣周期時,對具有獨立隨機時延和Markov特性延時的網絡控制系統進行了研究等。然而,以上提高的方法在實際應用中也存在一些問題,如:使用最大的網絡時延作為系統時延,可消除時延的隨機性對系統的影響,但無形中增大了網絡時延,增加了系統的響應時間。由于網絡時延的隨機性,很難用精確的數學模型描述出時延的分布規律,且由于Internet中普遍存在的丟包和包序顛倒等問題,也使得基于時延預估模型控制方法的應用受到了很大的限制。
在LonWorks遠程控制系統中,由于網絡時延的隨機變化導致系統狀態和參數等時刻發生變化,控制過程中會出現狀態和參數的不確定性,系統很難達到最佳的控制效果。因此,有必要引入一些控制策略來補償網絡時延帶來的影響。下面針對LonWorks在實現遠程控制中存在的網絡時延問題,提出一個初步的解決方案,緩解網絡延遲對遠程控制系統所產生的不良影響。
1 系統結構設計
1.1 網絡時延分析
根據時延的產生過程和不同特性,可將其分為四個組成部分:發送處理時延τ1、等待時延τ2、傳輸時延τ3和接收處理時延τ4。其中τ1和τ2在源節點產生,τ4在目標節點產生,τ3是信息發送時間與在信道傳播時間之和。網絡時延可表達為

時延對系統性能的影響,主要是由兩個部分引起一是控制器得到的反饋信號不是當前系統輸出,而是經過了時延;二是控制量到執行器又經過了時延。而發送處理時延、等待時延及接收處理時延可以通過軟件設置心跳/最大接收時間、時限閾值,最小差值等屬性,減小網絡變量更新時所造成的信息延時。將兩者綜合起來分析,相當于系統輸出在當前采樣周期被延時了,本文重點解決的也就是信號在網絡傳輸過程中所產生的時延問題。換個角度來看,就是發生了采樣抖動,如果對系統時延不加補償,控制器接收到并據以采取控制動作的是被延遲了的采樣信號,不能真實反映當前時刻的被控對象的狀態,因而產生的控制動作也是滯后的,這將導致系統性能變差和不穩定。
1.2 網絡時延的測量
采用BP神經網絡預測網絡時延,神經網絡最大的優點就是具有可以逼近任意的非線性的能力,理論上具有偏差和至少一個S型隱含層加上一個線性輸出層就可以逼近任意非線性,據此決定系統采用帶有一個隱含層的三層BP神經網絡來預測延時。神經網絡輸入層的神經元的個數取決于取得的歷史延時信息的個數,由一個滑動窗口根據網絡延時的狀態調整。中間層神經元的個數依據金字塔結構采取和輸入層相等的數目,如圖1所示。
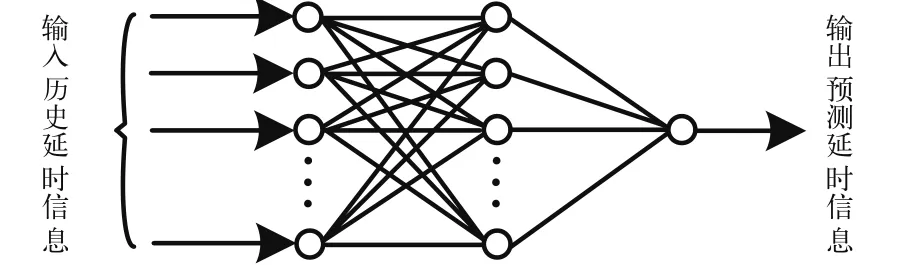
圖1 預測延時采用的BP神經網絡結構
在采用神經網絡預測延時時提出了“先預測,后驗證”的思想,即先依據已經獲取的從前一段時間內的延時信息訓練神經網絡,確定神經網絡的權值,然后根據這些權值預測網絡當前時刻網絡的延時狀況,在補償器進行延時補償。當獲得該時刻對應的網絡延時的實際值后,比較實際值和預測值,如果預測誤差小于許可范圍,認為網絡狀況還沒有發生劇烈的變化,繼續使用該權值預測延時,而無需重新訓練權值。否則,必須重新訓練權值,訓練神經網絡使用的信號為上一時刻網絡的真實延時。
如果當前延時預測誤差滿足系統性能容忍的誤差要求,則使用當前神經網絡的權值預測延時,此為正向處理。在給定輸入Ii、輸入層到中間層的連接權值Wji以及中間層的偏置值θj之后,可以求出中間層單元j的輸出:

其中f是sigmoid函數,即

用中間層的輸出Hj、中間層到輸出層的連接權值Vkj以及輸出層單元k的偏置值,可以求出輸出層單元的輸出Ok:

如果預測誤差超過了系統的容忍誤差要求,就要對神經網絡的權值進行修正,重新進行權值訓練,此為反向處理。誤差修正采用BP(反向運算)算法,其中Vkj、、Wji和θj的修正公式分別為:

系統實現時需進一步修正基本的BP神經網絡預測算法,將k時刻的神經網絡輸出值減去k-1時刻的預測誤差作為k時刻互聯網延時預測值,修正流程圖如圖2所示。

圖2 BP神經網絡預測算法修正流程圖
1.3 網絡時延補償
前向和反饋通道由因特網來傳遞控制信息和反饋信息,網絡傳輸存在時延,被控對象的運動狀態不能及時反饋和輸入信號進行比較或控制信號不能及時加到被控對象上,系統處于非正常狀態,系統的性能降低,甚至不能正常工作。為此,在獲得網絡時延值后,需要在系統中接入補償器,以消除網絡時延的影響。時延補償思路如圖3所示。

圖3 時延補償思路
1.3.1 PID控制器
根據網絡控制特點,引入PID控制器,在對模型精確已知的控制對象,在參數選擇恰當的情況下可以有效地減少超調量和響應時間,使系統具有較好的魯棒性。PID控制器產生的控制信號

式中e(t)為誤差信號,KP為比例增益,KI為積分增益,KD為微分增益。對該式進行拉普拉斯變換后得到PID控制器的傳遞函數

1.3.2 Smith預估補償器
為了改善滯后系統的控制品質,1957年O.J.M.Smith提出了一種以模型為基礎的預估器補償控制的方法[3]。其設計思想為:預先估計過程在基本擾動作用下的動態響應,然后由預估器進行動態補償,試圖使被延遲的被控量超前反饋到控制器,使控制器提前動作,從而大大降低了超調量,并加速調節過程[4]。在此利用Smith預估器對純滯后系統的補償控制原理,將網絡時延引入到Smtih預估器,對系統進行動態補償控制。遠程控制系統如圖4所示。

圖4 帶有時延預估補償控制的系統結構圖
該項研究中為實驗所用的直流電機的傳遞函數。Smith預估器的傳遞函數為,其中為被控對象傳遞函數,為t時刻網絡時延預測值。由于目前互聯網中路由器多是采用動態路由協議依據互聯網負載狀況來選擇信息的傳遞路由,因此互聯網負載的實時變化,造成信息的傳遞路由動態變化,從而導致信息傳遞延時具有不確定性。如果補償器中使用的延時信息不能夠隨著互聯網實際時延的變化而變化,那么系統的性能依舊不能得到保證。
2 系統仿真試驗
2.1 BP網絡設計
MATLAB環境下的神經網絡工具箱是以人工神經理論為基礎,利用MATLAB語言構造出許多典型網絡的激活函數、各種典型的修正網絡權值規則和網絡的訓練過程[2]。這樣網絡的設計可根據自己的需要調用工具箱中有關神經網絡設計與訓練的程序,避免繁瑣的變成過程,從而大大提高效率和質量。
此外,還可應用圖形用戶界面(GUI)來進行神經網絡設計,雙擊Neural Network toolbox中的NNTool,即可進入神經網絡設計主界面,如圖5所示。和上面是用函數來創建網絡一樣,需要設計一些參數,如網絡類型、名稱、輸入向量的最大值和最小值、網絡的層數等。
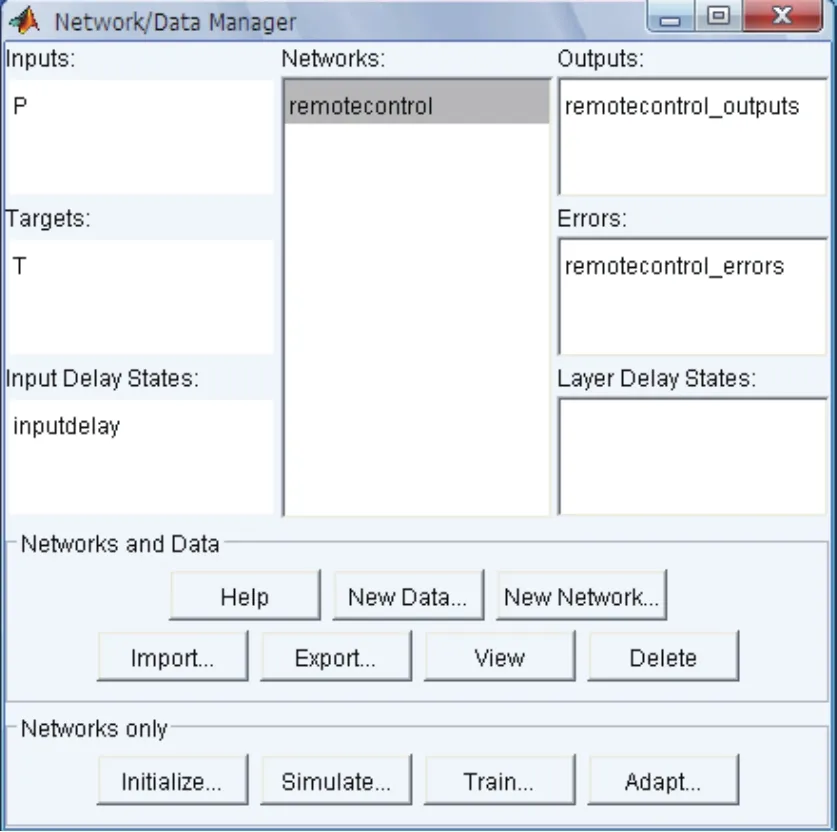
圖5 神經網絡設計主界面
在采用神經網絡預測延時時提出了“先預測,后驗證”的思想,即先依據已經獲取的從前一段時間內的延時信息訓練神經網絡,確定神經網絡的權值,然后根據這些權值預測網絡當前時刻網絡的延時狀況,在補償器進行延時補償。當獲得該時刻對應的網絡延時的實際值后,比較實際值和預測值,如果預測誤差小于許可范圍,認為網絡狀況還沒有發生劇烈的變化,繼續使用該權值預測延時,而無需重新訓練權值。否則,必須重新訓練權值,訓練神經網絡使用的信號為上一時刻網絡的真實延時。
2.2 訓練數據導入
要對BP網絡進行訓練,必須有訓練樣本。對訓練樣本數據的獲得,MATLAB提供了一些方法[2]。根據實際情況,對于Internet與控制網絡的連接,采用購買的動態測量Internet點對點網絡時延軟件Get Delay,并使用與其配套的軟件即可實現網絡時延的測量以及數據格式的轉換,然后用load函數將數據讀取到MATLAB中。
2.3 仿真試驗
具體實現時,還仔細考慮了通訊協議和工作方式的選擇問題。由于在基于互聯網的遠程控制系統中控制信息和反饋信息的產生具有頻率高、數據量小的特點,因此如果選擇TCP協議,就必須屏蔽TCP協議提供的“盡力而為(Best Effort)”功能,以便控制信息和反饋信息及時發送和接收。此外,選擇TCP協議網絡開銷比較大,不僅體現在其三次握手的確認機制上,還體現在其報文頭部相比于數據要大。
首先,采用點對點控制結構。這時系統中信號的傳遞不存在時延,通過仿真計算得到系統階躍響應曲線如圖6所示。

圖6 采用點對點結構的單位階躍響應
圖中曲線1為輸入單位階躍信號,曲線2為系統階躍響應,可以看到這時系統具有滿意的響應特性。
接著,采用如前面討論的網絡控制系統。網絡采用淮安信息學院與淮陰工學院之間的Internet,網絡中的數據由淮安信息學院S2實驗樓主機發出,首先轉發到淮陰工學院的路由器,然后再轉發回淮安信息學院主機,發送流量為91.2kb/s。在網絡存在時延的情況下,采用不同的控制器方式進行試驗,如圖7所示。將圖中虛線框中的結構去掉后,為第一種控制方式,即PID控制。加入smith預估器后為第二種控制方式,PID加smith預估控制,由于加入smith預估器其中牽涉到網絡時延參數的確定。由于沒有加入時延預估算法,只能根據所測得的近期網絡時延值確定一個適中量。加入BP網絡預測時延后為第三種控制方式。系統階躍響應曲線如圖8所示。

圖7 控制方式方框圖

圖8 不同控制器條件下的階躍響應
3 仿真結果分析
圖8中曲線1為控制信號,曲線2為PID控制器作用下的階躍響應曲線,曲線3為采用PID控制器和smith預估器作用下的階躍響應曲線,曲線4為采用PID控制器和smith預估器作用并采用BP網絡預測時延的階躍響應曲線,分析試驗結果,得到如下結論:
1)穩定性得到保持。采用不同控制器作用的遠程控制系統均能維持控制系統的穩定性,與點對點結構時的響應曲線進行比較,最后都能到達穩定狀態。由于遠程控制系統運行時存在時延,將會引起系統輸出量的振蕩,但這種振蕩隨著時間的推移而逐漸減小乃至消失,系統最終是穩定的。
2)超調量得到降低。超調量指的是響應曲線對穩態值的超出量與穩態值之比,其中比較關注的是最大超出量的大小,亦即最大超調量。從點對點結構時的響應曲線,可以看出系統超調量很小;在有時延的情況下,曲線2到曲線4的超調量依次降低,說明加入了控制器之后,遠程控制系統的性能得到了改善。而且從曲線3和曲線4可以明顯看到,加入時延預測后得到的響應曲線4超調量較小。
3)調節時間得到減少。調節時間指響應曲線進入并不再超出穩態值附近規定誤差帶的最小時間,在有時延的情況下,曲線2和曲線3的調節時間較長,而且比較接近,曲線4表現出的動態響應特性接近于點對點結構時的響應特性,調節時間與曲線2和曲線3相比減小了很多。
4 結束語
從以上分析可以得到這樣的結論,采用適當的網絡時延補償控制器,對互聯網中的不確定性時延進行正確預測,可以有效地解決LonWorks遠程控制系統在Internet環境下由于網絡延遲造成的動作滯后等問題,不僅能維持控制系統得穩定性,而且明顯降低了超調量,減小了調節時間,表現出良好的動態性能,使得遠程被控系統在接近穩態時的控制品質得到了改善,加快了系統達到穩態的速度。
[1]Yang S H,Chen X,Alty J.Design issues and implementation of internet-based process control system[J].Control Engineering Practice.2003(6):709-720.
[2]黃忠霖.控制系統MATLAB計算及仿真[M].北京:國防工業出版社.2001:12-50.
[3]任長清,吳平東等.基于互聯網的液壓遠程控制系統的延時預測算法的研究[J].北京理工大學學報.2002(5):14-19.
[4]王小平.遺傳算法理論應用于軟件實現[M].西安.西安交通大學出版社.2002.
[5]李穎宏,李正煦.基于LonWorks的智能PID控制器的設計[J].儀器儀表學報.2005(4):419-421.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
