艦炮CIWS對反艦導(dǎo)彈末端機動的航跡處理研究
2012-10-13 07:59:40李陸冀錢海俊圣錢生
艦船電子對抗 2012年1期
關(guān)鍵詞:模型
陳 斌,李陸冀,錢海俊,圣錢生
(海軍指揮學(xué)院,南京211800)
0 引 言
高新科技的飛速發(fā)展為反艦導(dǎo)彈的攻、防都提供了新的機遇。反艦導(dǎo)彈的末端變軌機動能力越來越強,如何進(jìn)一步提高艦炮近程武器系統(tǒng)(CIWS)抗擊末端機動反艦導(dǎo)彈的作戰(zhàn)效能是艦艇反導(dǎo)裝備發(fā)展的熱點、難點問題。艦炮CIWS航跡處理的精度是影響整個系統(tǒng)精度的重要因素,本文通過計算機仿真,針對典型反艦導(dǎo)彈的末端機動航路,研究分析如何近一步提高航跡處理的精度和反應(yīng)速度,從而提高艦炮CIWS對反艦導(dǎo)彈的作戰(zhàn)效能。
1 典型導(dǎo)彈攻擊模式
當(dāng)前反艦導(dǎo)彈的典型攻擊模式主要有:
(1)掠海飛行彈道,以法國的“飛魚”反艦導(dǎo)彈為代表,其特征是在進(jìn)入攻擊階段以后降低掠海高度,以小角度或基本水平的末彈道完成攻擊;
(2)末端躍升俯沖攻擊彈道,以美國的“魚叉”反艦導(dǎo)彈為代表,經(jīng)掠海巡航飛行段,在距離目標(biāo)艦幾千米時突然躍起,進(jìn)行大角度的俯沖攻擊;
(3)水平機動攻擊彈道,反艦導(dǎo)彈在水平面做蛇形機動或程控變軌機動;
(4)復(fù)合攻擊彈道,反艦導(dǎo)彈首先在水平面做水平機動,臨近目標(biāo)時做末端躍升俯沖攻擊。
從航跡處理的角度看,模式1的機動性最弱,而模式4是2、3兩種機動模式的結(jié)合,機動性最為復(fù)雜,因此本文主要研究模式4下的航跡處理問題。
2 艦炮CIWS對典型導(dǎo)彈航路的航跡
2.1 典型導(dǎo)彈航路仿真
參考典型導(dǎo)彈攻擊模式[1-3],設(shè)定反艦導(dǎo)彈航路:假設(shè)9 000m外雷達(dá)發(fā)現(xiàn)確認(rèn)導(dǎo)彈目標(biāo),雷達(dá)觀測坐標(biāo)為(-9 000m,0rad,0.034rad)。1s后目標(biāo)由巡航轉(zhuǎn)為機動,在海平面方向做歷時7.7s的蛇形規(guī)避機動,最大過載10g,機動完成后轉(zhuǎn)入比例導(dǎo)引,3.3s后目標(biāo)進(jìn)入攻擊末端,實施最大過載為10g的躍升俯沖攻擊。跟蹤過程歷時15s,導(dǎo)彈速度600m/s,整個跟蹤過程以我方艦船質(zhì)點為參考坐標(biāo)原點。目標(biāo)航跡詳見圖1。
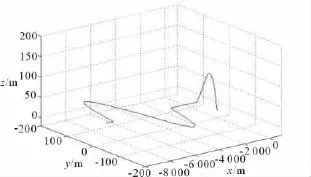
圖1 目標(biāo)三維航跡曲線
可見以上航路是典型的復(fù)合攻擊彈道,導(dǎo)彈首先在水平面做水平機動,臨近目標(biāo)時做末端躍升俯沖攻擊,機動、非機動交替出現(xiàn),若試圖準(zhǔn)確考察導(dǎo)彈機動對不同濾波器跟蹤性能的影響,則需拆分水平機動和躍升俯沖機動航路分別單獨濾波。
2.2 濾波器參數(shù)設(shè)定
(1)卡爾曼濾波器:選取勻加速(CA)模型作為目標(biāo)跟蹤模型。
(2)α-β-γ 常增益濾波器:濾波增益 K 選取:

(3)當(dāng)前統(tǒng)計模型(CS)算法:自相關(guān)系數(shù)a=1/3 0,最 大 加 速 度amax=9 8m/s2,a-max=-98m/s2[5]。
(4)交互式多模型算法:采用勻速(CV)模型、CA子模型集和CV、CS子模型集以及CV、CA、CS 3個模型作為子模型集分別組成3個濾波器[6]。
2.3 仿真實驗過程
設(shè)雷達(dá)采樣間隔T=0.05s,測距誤差ργ=20m,測角誤差ρφ=2mrad,ρθ=2mrad,仿真平臺MATLAB 7.10,經(jīng)50次Monte Carlo仿真得:
(1)在導(dǎo)彈2個主要機動段范圍內(nèi)各濾波器的位置均方根誤差(RMSE)如圖2所示。
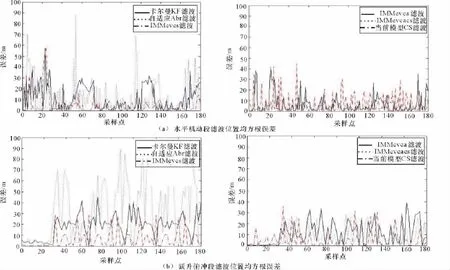
圖2 導(dǎo)彈2個主要機動段的濾波位置均方根誤差
圖2(a)為0~9s水平機動段,采樣點1~180,縱軸單位為m;圖2(b)為11~15s躍升俯沖段,采樣點220~300,縱軸單位為m。
(2)各濾波算法濾波平均誤差和周期平均耗時運算結(jié)果見表1。
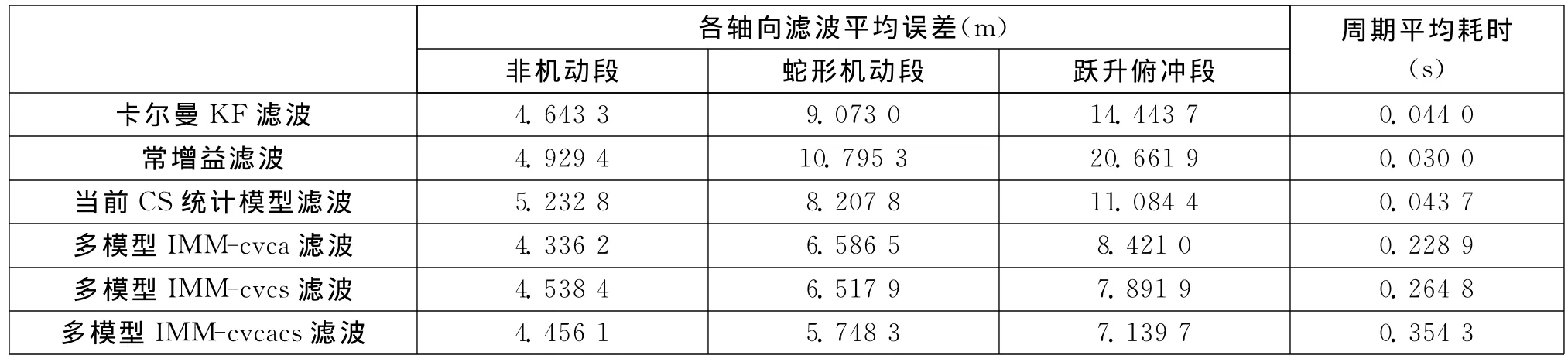
表1 各算法對導(dǎo)彈跟蹤精度和周期耗時
通過以上圖表的分析,可以看出,卡爾曼濾波算法在非機動段跟蹤精度尚好,但目標(biāo)機動后跟蹤精度可見明顯波動;α-β-γ常增益濾波總體精度在幾種算法中最差,但用時最短,計算量最小;當(dāng)前統(tǒng)計模型濾波算法在目標(biāo)機動段跟蹤效果最好,但其在非機動段表現(xiàn)不佳。
使用了勻速、勻加速、當(dāng)前模型3種模型作為子模型集組合的3種多模型算法相比前面KF、α-β-γ、CS算法跟蹤精度有較明顯優(yōu)勢。3種多模型算法跟蹤精度相近,其中使用勻速、勻加速、當(dāng)前模型3個子模型組合的多模型算法精度相對較好,由勻速、勻加速兩模型組成子模型集的多模型算法在3種多模型算法中用時最短。雖然相比之前的3種單模型算法,交互式多模型算法計算量增大、耗時相對較多,約1個數(shù)量級大小,但考慮到現(xiàn)代數(shù)據(jù)處理資源運算性能大幅提高,以多模型算法的優(yōu)秀濾波性能,其在CIWS工程實用中的價值應(yīng)不容忽視。
3 結(jié)束語
艦炮CIWS航跡處理是一項非常復(fù)雜的系統(tǒng)工程,本文圍繞反艦導(dǎo)彈經(jīng)典航路使用多種濾波算法進(jìn)行仿真實驗,對比分析多種濾波算法對CIWS導(dǎo)彈跟蹤效果的影響,提出了CIWS航跡處理工程實用的幾點建議,為提高CIWS跟蹤反艦導(dǎo)彈末端機動航路的性能提供了參考。
[1]李鵬,胡炎.反艦導(dǎo)彈典型運動建模與仿真[J].計算機仿真,2010,27(5):46-48.
[2]隋先輝,董受全,王少平,孫玉明.新一代的反艦導(dǎo)彈及其應(yīng)用技術(shù)[J].戰(zhàn)術(shù)導(dǎo)彈控制技術(shù),2010,27(1):36-39.
[3]劉劍威,吳傳利,徐國亮.反艦導(dǎo)彈典型攻擊模式及運動仿真研究[J].指揮控制與仿真,2006,28(5):47-49.
[4]何友,修建娟.雷達(dá)數(shù)據(jù)處理及應(yīng)用[M].北京:電子工業(yè)出版社,2009.
[5]王洋.基于自適應(yīng)濾波的機動目標(biāo)跟蹤算法研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2008.
[6]陳利斌,佟明安.機動目標(biāo)跟蹤的交互式多模型自適應(yīng)濾波算法[J].火力與指揮控制,2000,25(4):36-38.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19