基于小波變換和經驗模式分解的多路徑誤差提取及驗證方法研究
2012-10-13 07:59:56劉文釗戚宗鋒洪麗娜郝曉軍
艦船電子對抗 2012年1期
劉文釗,戚宗鋒,洪麗娜,郝曉軍
(解放軍63892部隊,洛陽471003)
0 引 言
先進的仿真技術是防空反導武器系統型號研制、試驗鑒定、裝備部署、作戰使用以及改進設計的重要手段。隨著建模方法的多樣化、仿真系統的復雜化以及仿真試驗難度的加大,系統建模與仿真校核、驗證和確認(VV&A)的重要性愈來愈突出。在現代近程防空反導雷達系統的發展過程中,低仰角跟蹤技術是其中的關鍵技術之一,但是由于多路徑效應的存在,使得跟蹤雷達對低仰角目標的測量產生較大誤差,這種誤差在仰角測量上尤其突出[1],[2],嚴重影響了雷達對低空目標的跟蹤精度。因此,對多路徑效應的建模及驗模是建立防空反導雷達系統仿真模型的一個重要方面。
文獻[2]給出了鏡反射和漫散射引起的多徑效應的代表性模型,以及考慮表面粗糙度、遮蔽效應等影響的修正粗糙面漫散射模型。文獻[3]建立了任意姿態、任意俯沖角的低空目標在各種粗糙度的平整和起伏地面多路徑反射回波的時域復包絡模型。這些模型的建立為精確建立防空反導雷達系統仿真模型提供了有利條件,但是對于仿真來說,需要確定仿真模型代表真實系統的準確程度,即對仿真模型進行可信度評估。文獻[1]~[3]均只是對多路徑模型及其仿真結果進行了分析,缺少可信度評估這一環節。文中在對雷達低仰角多路徑誤差進行分析的基礎上,利用小波方法和經驗模式分解方法提取實測雷達低仰角測量的多路徑誤差,采用TIC系數、相關系數和小波系數方法對仿真多路徑誤差模型進行了驗證,給出了置信度結果,并對結果進行了對比分析,為相關的模型驗證工作提供了有效途徑。
1 雷達俯仰角多路徑誤差分析
當雷達跟蹤低空目標時,除了有直線返回的回波外,由于地面或海面的反射,還有其他路徑反射回來的能量,呈現多路徑傳播的現象。一般把地面或海面的反射分為鏡面反射和漫反射2個部分,鏡面反射的誤差依賴于雷達、目標和反射面的幾何關系,具有相當強的確定性,對目標的測量產生嚴重的影響;而漫反射由于是在整個“閃爍面”上求和,具有很大的隨機性,可以等效為隨機誤差。對于跟蹤雷達,多路徑傳播主要對仰角誤差產生較大影響。考慮目標及其表面反射鏡像構成的2個回波源(見圖1),這時接收到的信號是目標反射的直達信號與地面反射信號的矢量和。地面相對平坦時,天線收到的總場為[2]:

式中:At、Ar分別為天線處和鏡像天線處自由空間源場強;f(θ)為天線的電壓增益方向性函數;ρ0為Fresnel反射系數的模;ρs為反射面粗糙因子;α為反射波與直接波之間的總相移;D為反射面發散因子。
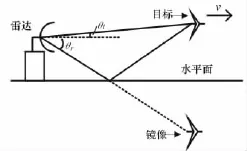
圖1 多路徑效應原理
矢量合成的結果使跟蹤角誤差信號失真,造成測量誤差,當目標低于1倍波束寬度時,多路徑效應尤為突出,引起仰角跟蹤的不穩定,出現周期性擺動。一個波束寬度為2.7°的S波段(3GHz)跟蹤雷達,跟蹤一個由近及遠、飛行高度約為1km并帶有信標的目標時,匹配實際雷達所計算出的多路徑誤差數據,如圖2所示[4]。可以看出,多路徑效應對雷達的跟蹤精度產生了很大影響,所以在對跟蹤雷達進行建模時,對于多路徑誤差模型的驗證是檢驗和評估雷達系統仿真模型有效性必不可少的環節。
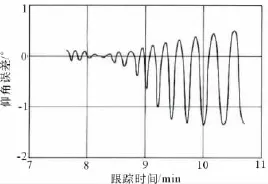
圖2 多路徑誤差
2 多路徑誤差提取方法
由于實際測量結果存在隨機誤差和瞬時強噪聲,首先可以采用濾波方法提取實際測量結果的多路徑誤差,剔除噪聲的影響,進而對模型進行驗證。多路徑誤差具有周期性,已有小波方法和經驗模式分解方法用于提取GPS多路徑誤差[5],考慮到GPS多路徑誤差和雷達低仰角測量多路徑誤差具有本質的相似性,接收到的信號都是直達信號和來自反射體反射的信號的合成,由此而產生了測量誤差,因此嘗試利用小波方法和經驗模式分解方法提取雷達低仰角測量的多路徑誤差。
2.1 小波方法
x(t)的連續小波變換定義為:

式中:ψ(·)為小波基函數;a為尺度因子,其作用是將基本小波ψ(·)作伸縮;b為時移因子,反映位移信息。
同傅里葉變換相似,稱WTx(a,b)為小波變換系數。
x(t)的離散小波變換以內積的形式給出:

式中:ψn,m(t)是對a、b離散化后得到的,一般取a=2m,b=n2m。
如果由式(3)得到了離散小波系數,則可以由下式重建x(t):

通過離散小波變換,1個信號可以分解為它的細節部分和近似部分。近似部分代表了信號的低頻成分,對應較大的尺度;而細節部分代表了信號的高頻成分,對應較小的尺度。通過小波變換對信號進行濾波的步驟如下:
(1)在選定的尺度水平下利用式(3)對信號進行分解;
(2)在每個尺度上對細節系數施加閾值;
(3)對經過處理后的小波系數由式(4)重建信號,即可得到濾波后的信號。
2.2 經驗模式分解方法
經驗模式分解方法(EMD)是從復雜信號里分離出1組固有模式函數(IMF)的方法。IMF滿足下面的條件:(1)在整個數據范圍內,局部極值點的個數與過零點的個數相同或至多相差為1;(2)在任意點處,由所有局部極大值點確定的上包絡和由所有局部極小值點所確定的下包絡的均值為零。
根據上面的條件,設原始信號為x(t),通過一種“篩分”的過程可以得到n個IMFci(t)和1個余量rn(t),即:

由分離過程可知,EMD是完備的,即式(5)是一個恒等式,由分解出的各IMF分量和余量可以重構原信號。
根據IMF的時間尺度特性,可以對信號進行濾波,低通濾波為:

式中:p的選取采用均方誤差(CMSE)準則[6]。
對仿真多路徑誤差施加高斯白噪聲,采用小波方法(3層db6小波基)和EMD方法提取多路徑誤差,取50次Monte-Carlo實驗結果,得到均方根誤差隨信噪比變化的曲線,如圖3所示。
由圖3可見,在低信噪比的情況下,EMD方法得到了較好的濾波結果。
3 多路徑誤差模型驗證
3.1 模型驗證方法
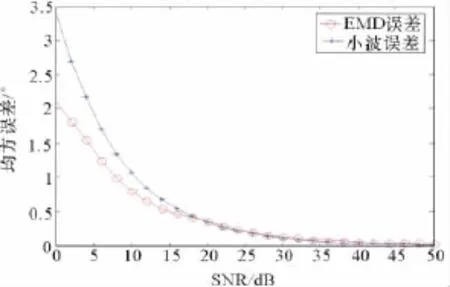
圖3 均方誤差隨SNR變化曲線
模型驗證是仿真技術的關鍵問題之一,它直接決定了仿真系統的置信度。根據待驗證數據的基本特點,可以將仿真模型驗證方法分為靜態數據的驗證方法和動態數據的驗證方法兩大類。表1列出了幾種主要的驗證方法。
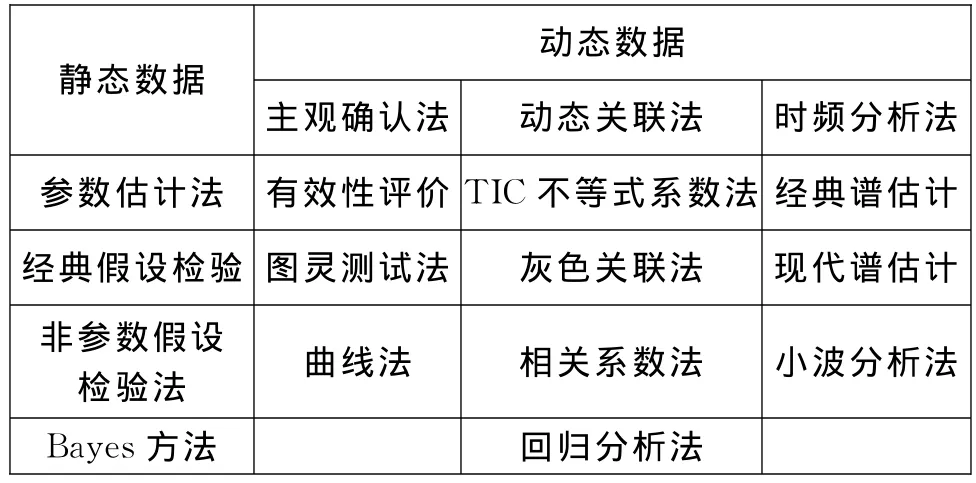
表1 模型驗證方法
考慮到多路徑誤差的動態性、周期性特點,分別利用TIC不等式系數法、相關系數法和小波分析法[7]來計算仿真模型的置信度,令U1、U2、U3分別代表相應方法計算出的置信度,xn,yn(1≤n≤N)分別代表仿真數據和實測數據,則計算公式如下:
式中:a為所關注的尺度;Ta為尺度a下的TIC系數;pa為根據小波變換后時間-尺度圖的能量特征計算出的對應尺度下的權重。
3.2 驗證實例
某型相控陣雷達在低角狀態時跟蹤一飛行目標,目標從50km處由遠及近飛行至10km處,以跟蹤時間為橫坐標,目標仰角測量結果和以GPS為基準的測量結果如圖4所示,雷達仰角跟蹤誤差和仿真多路徑誤差如圖5所示。
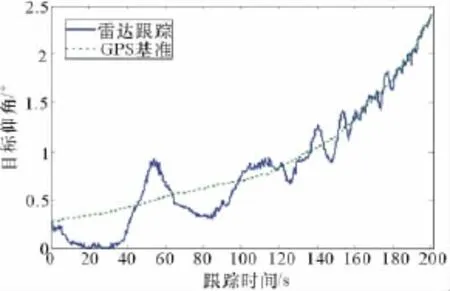
圖4 目標仰角測量結果
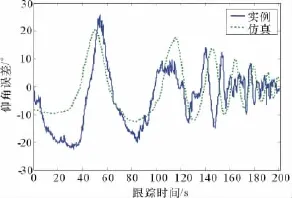
圖5 仰角誤差
由圖5可看出,仿真多路徑誤差變化趨勢與雷達仰角跟蹤誤差的變化趨勢具有相當程度的一致性,而實測數據中的抖動部分受到了隨機噪聲的影響。分別采用db6小波濾波和EMD濾波消除雷達實測仰角誤差中的隨機噪聲,濾波結果如圖6所示。
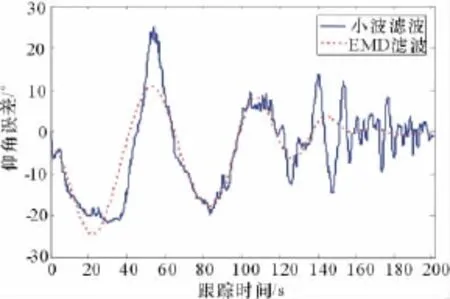
圖6 濾波結果
由圖6可見,小波濾波和EMD濾波均能消除實測數據中的隨機抖動部分,得到了較為平滑的結果,利用前面介紹的3種驗證方法,仿真數據和實測數據的驗證結果如表2所示。

表2 模型驗證結果
由表2可看出,濾波前模型的置信度結果相對較低,原因是不進行濾波處理,實測數據中除包含多路徑誤差外,還包含隨機因素(如環境和各種噪聲)的影響,此時直接比較一致性,就與模型驗證的目的不相吻合。表2表明仿真結果與濾波結果相關性更強,相似度更高,而EMD法濾波得到了置信度更高的結果,由圖1均方根誤差曲線不難得出這個結論。因此,采用濾波結果得到模型的置信度較合理。
4 結束語
本文針對雷達低角跟蹤的多路徑誤差模型,利用小波方法和EMD方法從實測數據中提取到了具有周期性的多路徑誤差,與仿真模型的對比表明,采用實測數據的濾波結果進行模型驗證更加合理,一致性也更高。從得到的數值結果來看,為了提高仿真置信度,在仿真中還需要考慮更多因素,例如加入粗糙度、遮擋等因素的漫反射模型[2]和考慮4條路徑的反射模型,針對不同的距離范圍建立不同的多路徑模型。
[1]吳海.新信號處理技術下低角跟蹤誤差分析[J].現代雷達,2007,29(12):27-30.
[2]張瑜,李玲玲.低角雷達跟蹤時的多路徑散射模型[J].電波科學學報,2004,19(1):83-86.
[3]段世忠,周蔭清,張孟,等.主動雷達導引頭多路徑效應的數字仿真[J].北京航空航天大學學報,2002,28(4):447-450.
[4]White W D.Low-angle radar tracking in the presence of multipath[J].IEEE Transations on Aerospace and Electronic Systems,1974,10(6):835-852.
[5]戴吾蛟,丁曉利,朱建軍,等.基于經驗模式分解的濾波去噪法及其在GPS多路徑效應中的應用[J].測繪學報,2006,35(4):321-327.
[6]陳文馳,劉飛.一種基于形態-EMD濾波的過程數據預處理方法[J].控制工程,2011,18(1):28-30,66.
[7]符文星,朱蘇朋,王建華,等.小波變換在導彈仿真模型驗證中的應用研究[J].彈箭與制導學報,2006,26(2):174-176.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34