一種粒子概率假設密度的模糊關聯方法*
2012-10-16 03:43:50謝維信劉宗香高存臣
中國海洋大學學報(自然科學版) 2012年11期
王 品,謝維信,劉宗香,高存臣
(1.深圳大學ATR國防科技重點實驗室,廣東 深圳518060;2.中國海洋大學數學科學學院,山東 青島266100)
多目標跟蹤技術一直是目標跟蹤領域的一個熱點研究問題。目標數目不定的多目標跟蹤問題無論在理論上還是在應用中都是具有挑戰性的問題。傳統的多目標跟蹤方法是先關聯后估計,關聯精度直接影響跟蹤效果,目標數未知并且存在雜波和虛警時,關聯很難實現[1-4]。Mahler等從統計的角度提出了多目標情況下“一階矩濾波器”的概念(也稱概率假設密度濾波器,PHDF)[4],PHDF避免了觀測值和狀態值之間直接關聯,但迭代過程中存在集合積分運算,計算上難以處理。所以 Vo等提出粒子 PHDF[5](PF-PHDF),PFPHDF可以很好的估計出每個時刻多目標的狀態值[6],但PF-PHDF跟蹤結果不能確認每個目標的狀態,進而不能給出有效的跟蹤航跡。Panta提出多假設關聯算法和PF-PHD濾波結合的跟蹤方法[6],但用多假設關聯算法過多地依賴目標和雜波的先驗知識并且計算復雜很難實時實現[6-7]。近年來Vo等又提出了適用于線性高斯系統的高斯混合PHD濾波方法(GMPHD)[8],推導了PHD的解析表達式,繼而又有大量改進的 GM-PHD濾波方法[9-11],對于系統噪聲和量測噪聲為非高斯噪聲的多目標跟蹤環境GM-PHD就無法使用,但PF-PHD仍然適用。
針對以上問題,提出1種新的基于PF-PHDF的多目標模糊跟蹤方法,這種方法用粒子濾波預測和更新多目標狀態集合的PHD,估計出目標數并用模糊C-均值聚類算法給出多目標的狀態估計,把得到的目標狀態作為新的觀測集,然后用模糊關聯得到各個航跡的關聯結果,最后通過建立臨時航跡濾掉了雜波點并且有效的提高了目標的跟蹤精度。
1 基于隨機有限集的多目標跟蹤框架
1.1 多目標跟蹤模型
在多目標跟蹤系統中,目標的出現和消失都是隨機的。本文假設每一時刻出現的新目標數服從均值為λa的柏松分布。一個k時刻的目標下一時刻可能存在也可能消失,假設目標從k-1時刻存活到k時刻的概率是ek|k-1,則目標在k時刻的死亡概率為1-ek|k-1。目標的檢測概率為PD。
目標的運動服從馬爾可夫動態模型:

觀測表示為:

假設在k時刻,目標數和觀測數分別為Nk和Mk,多目標的狀態集與觀測集分別表示隨機有限集合的形式,即Xk={xk,1,…xk,Nk}Es為多目標狀態,Zk={zk,1,…zk,Mk}Eo為多目標觀測,其中Es,Eo分別表示狀態空間和觀測空間。若k-1時刻狀態集為Xk-1,則k時刻的狀態集可以表示為:

其中:Sk|k-1(Xk-1)表 示 k 時 刻 仍 存 活 的 目 標 集;Bk|k-1(Xk-1)表示由k-1時刻衍生的目標集;Γk表示k時刻出現的新目標集。一般用f(Xk|Xk-1)表示多目標的狀態轉移密度。類似地,k時刻的觀測集可表示為:Zk=Gk(Xk)∪Ck(Xk),其中Gk(Xk)表示由 Xk產生的觀測值隨機有限集;Ck(Xk)表示雜波或者虛警產生的隨機有限集。
1.2 隨機有限集的概率假設密度濾波
隨機有限集理論的引入為多目標的Bayes濾波提供了與單目標的Bayes濾波一致的完美形式,但需要建立相應的概率分布和概率密度的概念。由于涉及到計算集導數和廣義積分問題,在隨機有限集理論中概率分布一般采用信任函數的形式,即:對于隨機有限集Ξ的概率分布表示為[5]:

1.2.1 多目標Bayes濾波 假設k-1時刻多目標的全局后驗密度為pk-1(Xk-1|Z1∶k-1),則k時刻多目標全局密度預測方程為[4]:

其中:μs表示一種合適的測度[5]。更新后得到k時刻多目標的全局后驗密度:

在目標數目不定或數目較大的情況下全局密度的計算非常困難,使得基于全局密度的多目標Bayes濾波在工程上難以實現。所以Mahler等從統計的角度提出了多目標情況下“一階矩密度”的概念,即概率假設密度。

其中:δx表示中心為x 的 Dirac delta函數;DΞ(x0)是在x0點期望的目標密度;∫SDΞ(x)dx時出現在S內的期望的目標數,而利用DΞ(x)的極值可以給出目標的狀態估計。
PHD濾波器(PHDF)就是對多目標后驗密度的概率假設密度Dk|k遞推過程,也是通過預測更新2個步驟來實現。假設k-1時刻后驗密度為υk-1。
PHD預測方程:

PHD更新方程:

1.2.2 概率假設密度 隨機有限集Ξ的概率假設密度表示為:

其中:ek|k-1,fk|k-1,pD,gk|k-1同前定義;βk|k-1,βk分 別表示Bk|-1,Bk的PHD;kk表示雜波的PHD。PHD濾波一般通過粒子濾波(SMC)來實現,粒子的更新權值之和等于估計的目標數。
2 基于隨機有限集和模糊關聯的多目標跟蹤
2.1 模糊關聯
模糊關聯(FDA)算法是以模糊均值聚類(FCM)算法為基礎的,FDA的目的就是把每條航跡的預測值vi(i=1,2…c)作為聚類中心,然后利用FCM方法把每個觀測和可能航跡之一關聯起來。FCM是一種能自動對數據樣本分類的方法。他通過優化模糊目標函數得到每個樣本點相對類中心的隸屬度,從而決定樣本點的歸屬。即:找出最佳隸屬度uik和最佳模糊聚類中
PF-PHDF雖然能給出在當前時刻目標的估計狀態,但是它沒有保留任何目標航跡。然而有些數據關聯算法可以基于PF-PHDF給出目標的跟蹤航跡,因此,需要結合數據關聯算法來獲得目標的航跡,將模糊數據關聯算法引入到PHDF方法當中對復雜情況下多目標進行跟蹤。具體過程見圖1。
由圖1可已看出:由k時刻的觀測值通過PFPHD得到每個粒子的狀態、權值、和目標數,并通過模糊聚類(FCM)得到每個目標k時刻的估計狀態,然后根據模糊關聯(FAD)得到多目標跟蹤航跡,最后通過建立臨時航跡的方法確定形成多目標航跡。
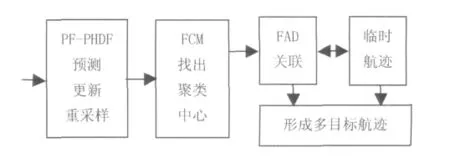
圖1 PF-PHDF與模糊關聯跟蹤實現過程Fig.1 Tracking with the PF-PHDF and fuzzy associate
2.2 算法的具體實現步驟如下:
步驟一 初始化PHD,即:Dk|k。在k=0時刻,用帶權重的粒子初始化概率假設密度D0|0,即:初始密度函數為初始的粒子個數。
PF-PHD的具體過程是:

步驟四 模糊關聯的具體實現步驟:
(2)利用FCM算法求分割矩陣U,分割矩陣中的元素uik代表航跡i和觀測k之間的關聯度量,分割矩陣包含了所有航跡和所有觀測的隸屬度。相似性度量由下式確定
(3)對最大隸屬度值uMik進行搜索,將觀測kM賦給航跡iM,然后把uMik對應的行和列上的值賦值為0。重復搜索一直到所有觀測或者所有航跡有關聯對象,或者當時的最大隸屬度小于隸屬度初始閾值。
步驟五 判斷臨時航跡內是否為空,如果臨時航跡內有航跡,接下來就和臨時航跡內的航跡關聯,轉到步驟四。然后分析關聯不上的航跡和觀測,即找出所有沒有關聯上的航跡和沒有關聯上的觀測,沒有關聯上的觀測形成新的航跡,沒有關聯上的航跡暫時保留在臨時航跡內。
步驟六 確認目標,分離并剔除雜波。被保留的航跡連續3個時刻都沒有相應的觀測與之關聯,認為該目標在第一次沒有關聯對象的時候已經消失或離開觀測區域。
3 仿真實驗
為了驗證算法的性能,便于比較,仿真實驗條件如同文獻[6],實驗步長為50。傳感器的觀測空間為二維平面區域S=[-400,400]×[-400,400],時間間隔T=1s,PD=0.99,ek|k-1=0.95,λa=3。
每個目標的運動模型和觀測模型分別為:
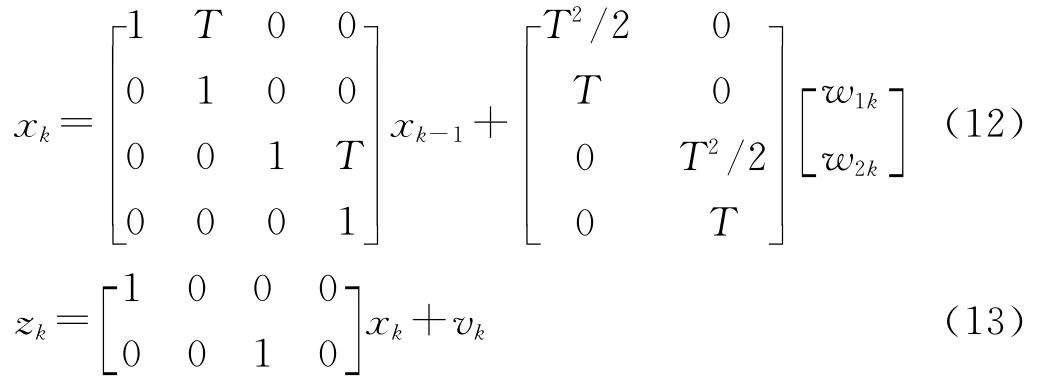
w1k,w2k,vk都是均值為0的高斯白噪聲,標準差分別為1、0.1和0.5。初始粒子數為1 000,每個目標分配的粒子數目為500。多目標估計誤差用Wasserstein距離[5]。仿真結果見圖2~3。
圖2和3顯示了50s內PF-PHD方法跟蹤真實軌跡的估計值,從圖中可以看出,PF-PHDF的跟蹤結果只是每個時刻目標的狀態的估計值,沒有跟蹤軌跡,而且偶爾估計誤差比較大,有的雜波點沒有去掉,這是因為只利用聚類技術估計的狀態值具有不可靠性[8]。
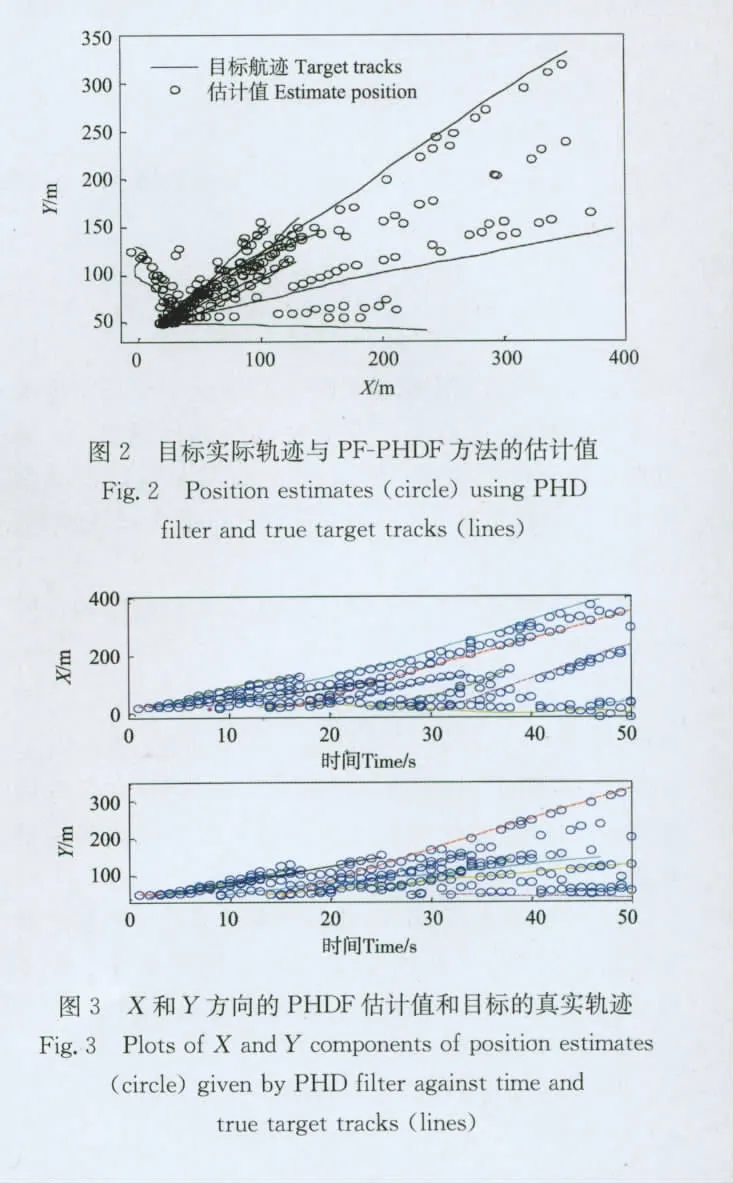
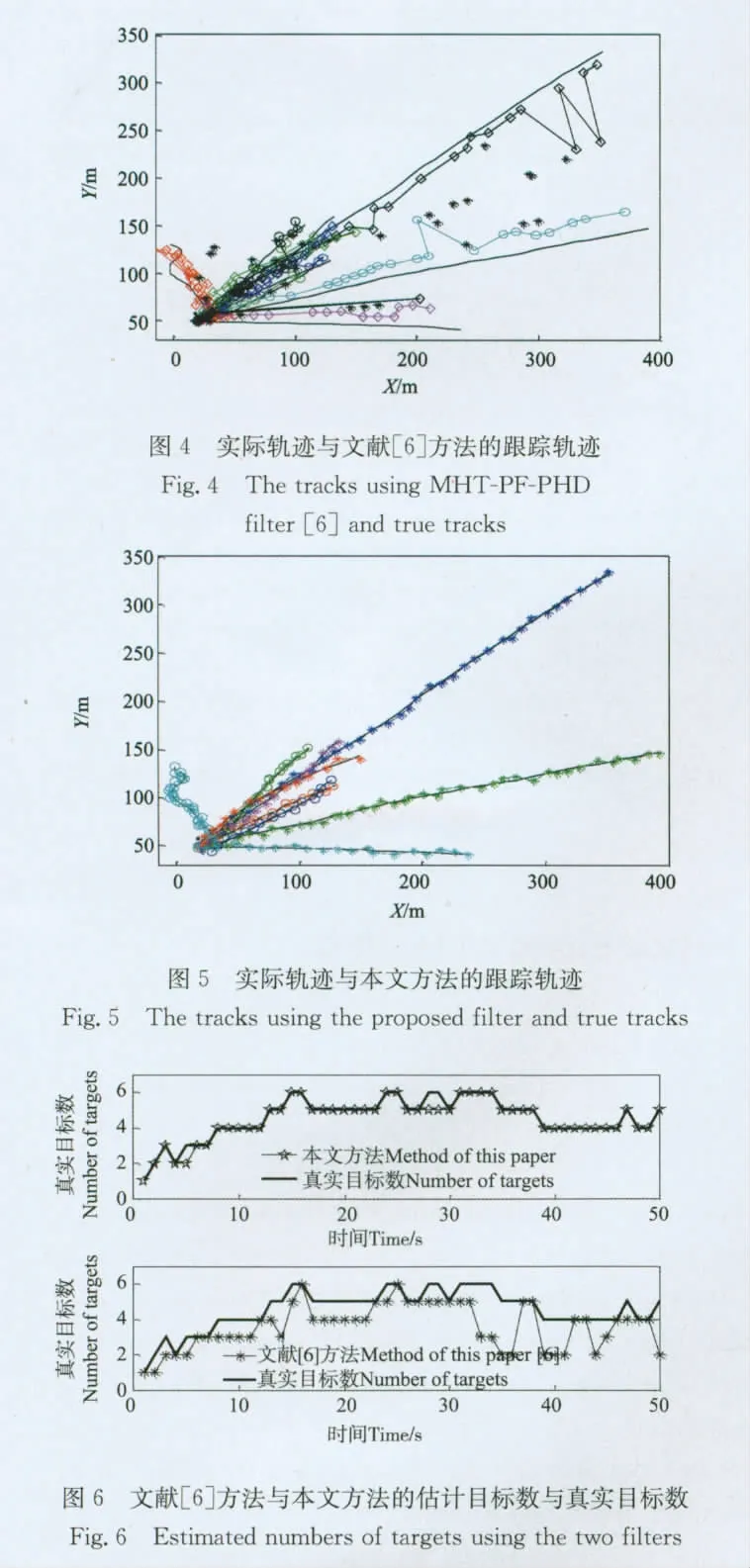
圖4是經過PF-PHDF濾波后,然后利用多假設關聯的方法給出多個目標的運動軌跡,但是無法分辨出雜波點,而且通常目標的軌跡也不連續,這是由于漏檢或者是PHDF濾波過程中濾掉了真實目標點。圖5是本文提出方法的跟蹤航跡,可以看出本文方法明確了給出了每個目標的運動軌跡,由于保留臨時航跡思想的引入,濾除了雜波點并修復了漏檢等情況造成的目標軌跡的中斷。圖6是2種方法跟蹤目標數的比較,文獻[6]的估計目標數中作者首先去掉了每個時刻的雜波點數,也就是2種發放估計的真實目標數的比較,明顯看出本文方法能比較準確的估計出目標數。圖7是文獻[6]方法和本文方法的跟蹤誤差比較,從圖中可以看出,本文方法的狀態估計誤差明顯小于文獻[6]的方法,進一步表明了本文方法的優越性。

圖7 本文方法和文獻[6]方法的狀態估計誤差比較Fig.7 Wasserstein distance between point estimate outputs of MHT-PHD filter[6]and the proposed filter
表1給出了3種PHD濾波器的時間復雜度的對比結果,從表中看出,PF-PHD的實時性能最好,實時性能最差,而 FDA-PF-PHD 實時性能比 MHT-PFPHD要好。這是因為每次關聯MHT的計算量比FDA的計算量大。總體看來本文提出的方法的跟蹤精度較高,跟蹤速度相對較快。
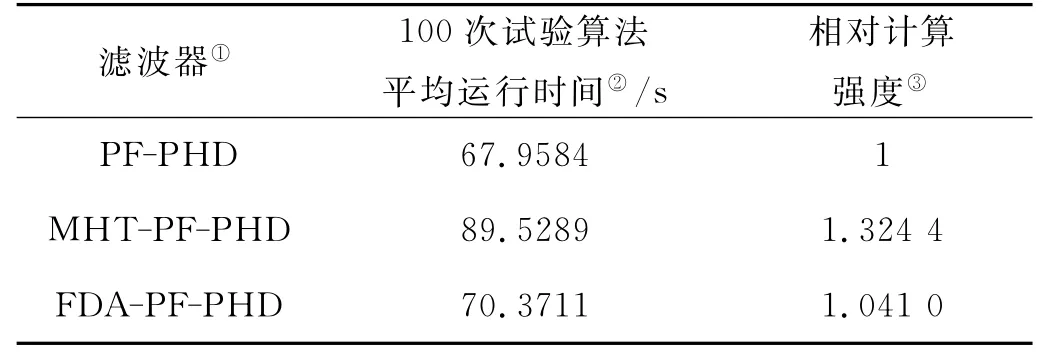
表1 CPU運行時間對比Table 1 Comparison of CPU running time
4 結語
目標數目不定的多目標跟蹤問題無論在理論上還是在應用中都是具有挑戰性的問題。本文利用隨機集的概率假設密度濾波的方法確定目標數目并估計出每個時刻的目標狀態,然后利用模糊數據關聯的方法給出各個目標的運動軌跡,同時提出了建立臨時航跡的方法。通過大量的仿真實驗與文獻算法的跟蹤性能進行比較,實驗結果表明,新算法有效地避免漏檢造成的目標丟失,得到每個目標的航跡。特別對于目標發生交叉的情況,能很好地區分每個目標的航跡,并能很好的去除雜波點。CPU耗時比文獻[6]的方法減少了20℅。下一步將繼續研究優化算法,進一步提高多目標跟蹤的實時性,另外考慮研究PHDF的收斂性和穩定性[13-15],進一步提高 PHD在多目標跟蹤領域的實用性。
[1] 徐曉濱,文成林,劉榮利.基于隨機集理論的多源信息統一表示與建模方法 [J].電子學報,2008,36(6):1174-1181.
[2] Mahler R.Random sets:unification and computation for information fusion-a retrospective assessment[C].the 7th International Conference on Information Fusion,Sweden:ICIF,2004:1-20.
[3] Chenglin Wen,Zhiliang Li,Xiaobin Xu.A new method for extracting fuzzy evidence from fuzzy information based on the random set theory [C].Chongqing:7th World Congress on Intelligent Control and Automation,2008:4999-5003.
[4] Mahler R.Statistical multisource-multitarget information fusion[M].Boston:Artech House Publishers,2007.
[5] Vo B,Singh S,Doucet A.Sequential monte carlo methods for multi-target filtering with random finite sets [J].IEEE Trans Aerospace and Electronic Systems,2005,41(4):1224-1245.
[6] Panta K,Vo B,Singh S.Novel data association technique for the probability hypothesis density filter [J].IEEE Transactions on Aerospace and Electronic Systems,2007,43(2):556-570.
[7] Papi F,Battistelli G,Chisci L,et al.Multitarget tracking via joint PHD filtering and multiscan association[C].Seattle:the 12th International Conference on Information Fusion,2009:1163-1170.
[8] Ba-Ngu Vo,Wing-Kin Ma.The Gaussian mixture probability hypothesis density filter[J].IEEE Trans.Signal Processing,2006,54(11):4091-4104.
[9] Clark D,Vo B T,Vo B N,et al.Gaussian Mixture Implementations of Probability Hypothesis Density Filters for Non-linear Dynamical Models[C].The IET Seminar on Target tracking and Data Fusion:Algorithms and Applications.Birmingham,UK:IET Press,2008:21-28.
[10] Clark D,Vo B T,Vo B N,et al.Gaussian Particle Implementations of Probability Hypothesis Density Filters[C].IEEE Aerospace Conference.Montana,USA:AIAA Press,2007:1-11.
[11] 張俊根,姬紅兵,蔡紹曉.基于高斯粒子JPDA濾波的多目標跟蹤算法 [J].電子與信息學報,2010,32(11):2686-2690.
[12] Mahler R.PHD filters of higher order in target number[J].IEEE Transactions on Aerospace and Electronic Systems,2007,43(3):1523-1543.
[13] 高存臣,徐偉麗.一類線性中立型不確定時滯系統的魯棒穩定性[J].中國海洋大學學報:自然科學版,2010,40(7):155-158.
[14] Clark D,Bell J.Convergence results for the particle PHD filter[J].IEEE Trans Signal Processing,2006,54(7):2652-2661.
猜你喜歡
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:30
當代陜西(2021年17期)2021-11-06 03:21:36
當代陜西(2019年15期)2019-09-02 01:52:00
兒童故事畫報(2019年5期)2019-05-26 14:26:14
學苑創造·A版(2018年11期)2018-02-01 06:29:20
讀者(2017年5期)2017-02-15 18:04:18
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56