基于多Agent的編隊協同反潛仿真
2012-10-20 06:57:58梁義芝
艦船科學技術 2012年2期
關鍵詞:模型
梁義芝,張 云,王 超
(1.海軍大連艦艇學院,遼寧 大連 116018;2.國防科技大學 機電工程與自動化學院,湖南 長沙 410073)
0 引言
編隊協同反潛是編隊根據上級要求,對執行一定作戰任務的敵潛艇進行搜索、跟蹤、攻擊和防御而組織實施的,其主要作戰活動包括:接觸并識別目標,綜合使用反潛武器,及時規避對抗潛艇攻擊等。
本文在分析編隊協同反潛作戰特點的基礎上,研究構建反潛作戰仿真中的Agent個體模型和基于多Agent的協同作戰模型。
1 編隊協同反潛
1.1 編隊協同反潛的指揮方式
在編隊協同反潛作戰中,實施集中與分散相結合的指揮方式[1]。
1)整個反潛作戰以統一指揮為主。編隊統一選定搜索方法,確定搜索隊形和速度,各艦直升機由編隊統一組織使用。
2)具體的攻擊方法和機動采取分散指揮方式。如派遣直升機進行反潛時,編隊指揮員、載艦指揮員及空中指揮員之間需根據直升機活動空域、戰場情況適時交接轉換指揮權。遇有緊急情況如受到威脅時各艦(機)可獨立進行抗擊和反擊。已發現目標的艦(機)應迅速上報,并按編隊指揮所命令引導其他兵力接敵,組織指揮編隊攻擊。
1.2 編隊反潛中的作戰協同
作戰協同,是指各種作戰力量為形成整體作戰能力,按照統一的協同計劃,在行動上進行的協調配合[2]。編隊反潛中的協同是海上作戰的戰術協同,其中既有兵力協同,也有火力協同。協同的組織者、協同對象、協同手段和協同信息構成了作戰協同的基本要素。編隊指揮員是編隊反潛作戰的協同組織者,協同對象主要是編隊中的各艦艇、直升機,協同手段主要是通信、指控設備等,協同信息主要包括上級協同指示、本級協同計劃、作戰協同狀況、友鄰情況等。其中協同信息是協同的基礎,是實現協同的重要條件和依據。
編隊反潛協同主要有計劃協同和臨機協同2種形式。編隊進行協同對潛搜索的時候,根據敵情、編隊任務、出動直升機數量和搜索能力等因素,制定協同計劃,明確編隊隊形、機動方法、直升機任務、陣位和搜索手段等,這屬于計劃協同。臨機協同主要是當戰場情況發生重大變化,原定的協同計劃已不再適用新的戰場情況時,必須重新組織新的協同。
2 編隊中Agent個體模型
進行編隊協同反潛仿真時,可將編隊中各個艦艇和直升機都抽象為實體Agent。
2.1 實體Agent的體系結構
編隊協同反潛作戰,實質上是編隊各作戰實體在一定的使命背景下,根據具體任務,同時面對多個目標的作戰行動。實體不但需要對戰場態勢進行分析推理、對作戰行動進行規劃決策、相互通信協調作戰行動,還能在緊急情況下不需進行慎思,迅速反應采取相應對抗措施,故將各實體Agent設計為混合型結構,如圖1所示。
Agent通過感知模塊和通信模塊獲取外部環境信息,這些信息在信息分類模塊中進行處理分類,同時修正原來的世界模型World。在態勢分析模塊中對World進行態勢分析得到Agent當前態勢Status,根據Agent的當前目標Goal、當前態勢Status以及戰術規則中的知識,生成任務規劃TaskPlan。在執行動作過程中,如果態勢發生重大變化,則進行重新規劃,得到新的任務規劃。任務規劃TaskPlan經Agent的決策模塊得到下一步執行的動作Action。當Agent得到緊急信息時,可以直接匹配經驗庫,產生應急動作序列。最后所有的動作都調用相應的物理行為模型,模型執行的結果會影響外部環境。
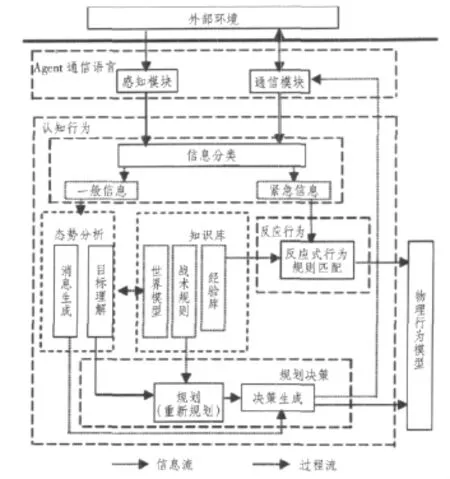
圖1 混合型實體Agent結構圖Fig.1 Structure of composite agent
Agent通信模塊所接收到需要應答的消息在態勢分析模塊進行處理后,在消息生成模塊生成應答消息的內容,最后由決策生成模塊確定時機將消息輸出到通信模塊,從通信模塊發到相應的其他Agent。而Agent在消息生成模塊主動產生的消息,也通過同樣的路徑傳輸。
2.2 基于MBGT的實體Agent認知模型
1)反潛編隊實體Agent主要心智狀態分析
反潛編隊中實體Agent需有較強的社會意識,要做到面向使命、服從命令、努力完成任務,其自主性一般會受到較大的約束。根據編隊中實體Agent的這些特征,本文提出了反潛編隊中實體Agent的MBGT模型,即用使命、信念、目標和任務模型來描述反潛編隊實體Agent的心智狀態。
實體Agent的使命Msn(Φ),在其心智狀態中占有最高地位,是其他心智狀態活動的依據。Msn(Φ)表示實體Agent將Φ(使命狀態)作為一次作戰行動的最終目標。
每個態勢和1組信念可達世界相關聯,信念可達世界是Agent相信世界的可能情況。實體Agent的信念包括2部分,一是Bel(Φ),表示Agent在當前世界和時間相信Φ已經或將會成立,Φ即為Agent此時的信念可達世界;二是實體Agent對其他實體Agent心思的揣度,如 Beli(Agentj,Belj(Φj)),即 Agenti相信Agentj的信念可達世界為Φj。
實體Agent的目標Goal(Φ),即目標可達世界。Goal(Φ)中1個節點是Agent完成Msn(Φ)的1個子目標。
實體Agent的任務Task(Φ),即Agent為實現一定目標而進行的活動。Agent根據對Msn(Φ)、Capa(能力)的綜合處理,在Goal(Φ)中決策選擇某個節點作為當前目標,然后運用Plan(規劃)算子,得到當前任務Task(Φ)。
實體Agent的能力Capa,是其完成任務的基礎,也是主體之間進行有效合作的基礎。Agent的能力主要包括2方面,即思維活動方面的能力和完成動作任務的能力。本文僅研究后者,并假設實體Agent在思維活動方面的能力沒有區別。實體Agent的能力描述主要涉及狀態參數、環境參數以及對應裝備的技戰術性能指標[3]3個方面。根據實體Agent達到某個目標對各方面能力的不同要求,來決定其能力值。如執行搜潛任務時,實體Agent水聲探測能力最重要,其中水聲探測能力的主要影響因素有:實體的機動性能、探測海區水聲環境特點、探測設備的探測距離和精度。
編隊反潛作戰中指揮員規劃決策時,一般通過戰術計算結果結合相應規則從有限的備選方案中進行選擇,本文中實體Agent的規劃采用規則匹配與戰術計算相結合的方法,實體Agent的決策采用基于規則的方法,實體Agent根據約定的規則進行決策能滿足仿真要求。
2)實體Agent的認知模型結構
編隊中實體Agent是在自己上述心智狀態和上級命令的雙重驅動下行動的。命令Command主要有3種形式:MsnCom(使命命令,以使命狀態作為命令下達的內容,要求接受該命令的實體Agent實現該使命狀態)、GoalCom(目標命令,以某個目標作為命令下達的內容,要求接受該命令的實體Agent實現該目標)、TaskCom(任務命令,以某個任務作為命令下達的內容,要求接受該命令的實體Agent完成該任務)。這3種形式的命令,都轉化為Agent相應的心智狀態,Agent收到這3種命令并做出承諾答復后,命令的內容在實體Agent的相應心智狀態中都有強制的優先權,一般優先于Agent自身產生的心智狀態的內容。3種命令的優先級由高到低為 TaskCom,GoalCom和MsnCom,即越具體的命令優先級越高。
友鄰或下級的協同請求Co Re qu分為2種,即GoalCo Re qu(目標一致請求)和TaskCo Re qu(任務一致請求)。當協同請求來自于同級時,GoalCo Re qu表示協同請求方要求與被請求方協同完成同一目標,TaskCo Re qu表示協同請求方要求與被請求方協同完成同一任務。當協同請求來自于下級的時候,表示下級請求上級將其目標或任務作為上級的當前目標或當前任務。
實體Agent將GoalCo Re qu中的目標放入Goal(Φ),將TaskCo Re qu中的任務放入 Task(Φ),并將請求目標(任務)與當前目標(任務)進行比較,決定是否替代;如果可以替代則將請求目標(任務)作為當前目標(任務),而原來執行的當前目標或任務在Goal(Φ)或Task(Φ)中,具有除當前目標(任務)外最高的優先級。圖2所示為命令、請求與心智狀態相互作用的實體Agent認知模型結構。
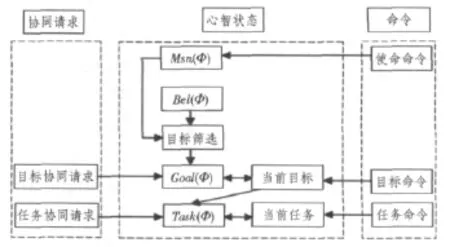
圖2 實體Agent認知模型結構Fig.2 Structure of cognizing model for agent entity
3 編隊中Agent協作模型
編隊反潛與單艦反潛,其最大的區別就是編隊的協同特性,在仿真中如何體現這個特性,是很重要的問題。本文運用多Agent的協作理論來探討解決這個問題。
3.1 基于組織觀點的編隊反潛多Agent系統
多Agent協作是指主體之間互相配合一起工作,包括完全協同型、協同型、自私型、完全自私型、協同與自私共存型等5種類型。其中協同型是指系統中的智能主體具有1個共同的全局目標,同時各主體還有與全局目標一致的局部目標[4]。編隊協同反潛作戰就屬于這種類型,編隊各反潛實體的共同目標就是完成反潛使命,同時各反潛實體必須完成各自所擔負的任務并保證友鄰及自身的安全。
1)編隊多Agent組織中的關系
編隊多Agent組織中出現的幾種關系如下:
①指揮控制關系。編隊作戰活動的協調與合作主要是通過一定的指揮控制結構實現的。
②對等關系。有些實體之間的關系是對等的,它們都能在需要的時候請求其他角色平等地參與相關決策或行動。
③通信關系。通信是組織內的各個角色之間交換信息和情報,實現協同作戰的必要途徑,編隊之間的情報共享必須通過通信來實現。
④依賴關系。依賴關系的存在是由于各個角色能力的不同以及資源的限制。在編隊仿真系統的虛擬組織中,信息關系和行為依賴關系是2種最重要的依賴關系。
2)編隊多Agent組織的共同使命
編隊海上作戰行動尤其強調一致性,無論進行什么形式的反潛行動,都有一個使命貫穿其中,這個共同使命使所有實體Agent都有高度的整體意識。實體Agent在承擔了某項作戰目標或任務后,與實現同一目標或任務的團隊中其他實體Agent保持高度協作,在努力實現自身承諾的同時盡量協作團隊中的其他實體Agent實現該目標或任務;對于編隊中不屬于該團隊成員的實體Agent,在條件允許的情況下,也會盡量支援協作他們,因為完成共同使命才是他們的最終目標。
在不同的使命背景下,編隊實體可能會執行相同的任務、遇到同樣的態勢,如編隊執行護航防潛或應召搜索使命時,編隊實體都可能突然發現潛艇,而接下來采取的行動,往往因為使命不同而不盡相同。
3.2 基于共同使命的編隊協同反潛模型
編隊組織需要具備在運行時動態選擇協作方式的能力,以適應不同的戰場條件和任務環境。確定仿真的使命背景后,編隊指揮Agent采用分布計劃集中規劃的方法,根據各實體Agent的能力分配任務,為它們的反潛行動形成一個統一的規劃,在行動過程中根據需要進行協調控制或重新規劃。實體Agent產生協同需求時,則會向其他Agent發出協作請求,進行協作協商。同時各實體Agent必須遵守一定的規則,主要按照作戰條令或使命背景下的特殊要求執行任務,以確保作戰行動的順利進行,這屬于社會規則協調方法。由于該方法的實現必須以編隊各實體Agent在某些心智狀態上的一致為基礎。因此本文提出了基于共同使命的編隊協同反潛協作模型,在共同使命這一更高層次對編隊各實體Agent的作戰協同進行約束,更符合客觀實際,也能產生更靈活的協作協調效果。
1)基于共同使命的編隊協作框架
編隊作戰中,實體Agent之間必須盡可能信息共享,使各實體Agent面對統一的戰場態勢,但在通信中斷的情況下,實現信息共享往往比較困難。即使實體Agent面對一致的戰場態勢,由于所處的空間位置和自身狀態不同,他們的信念、目標、任務等心智狀態往往不盡相同。編隊組織的聯合行動并非單個實體Agent行為的簡單組合,為使他們進行有效的協作,不但需要上級命令的約束,而且需要共同使命為編隊組織的協同作戰提供基礎和保證。基于共同使命的協作模型框架中,共同使命、共同信念、聯合目標、聯合承諾、聯合任務等幾個表達集體意識的心智狀態發揮重要作用。
共同使命描述了整個編隊Ψ中所有Agent成員完成的共同使命,在作戰的整個過程中都致力于共同使命的完成。編隊Ψ中所有Agent擁有共同使命Φ,記為FMsn(Ψ,Φ),等價于編隊中的每個Agent成員都擁有使命Φ,每個Agent的Msn(Φ)與FMsn(Ψ,Φ)是一致的。
共同信念描述1個Agent團隊對于某個事實的共同認識。如果Agent團隊Θ擁有共同信念Ω,記為MBel(Θ,Ω),等價于此團隊中的每個Agent成員都擁有信念Ω,同時每個Agent都相信團隊中的所有其他成員也擁有信念Ω。
聯合承諾JCommit(Θ,γ,η)是指協作團隊Θ共同承諾實現γ(γ表示聯合目標或聯合任務),η是γ的持續條件。聯合承諾描述1個團隊所有成員對某個群體行為做出共同的承諾,同時相信每個成員都將努力實現它。1個團隊就某個目標或任務做出聯合承諾后,團隊中每個Agent必須將γ已經實現或γ實現不了的情況這一私有信念轉化為團隊的共同信念。
聯合目標 JGoal(Θ,δ,?)是指 Agent團隊 Θ 中所有的Agent都將目標δ作為當前目標,?是聯合目標的持續條件。1個團隊就某個聯合目標做出聯合承諾以后,團隊中每個Agent必須將自己已經實現或現不了的目標δ的情況這一私有信念轉化為團隊的共同信念。
聯合任務JTask(Θ,τ,λ)是指協作團隊Θ共同承諾完成任務規劃τ,λ是將τ作為團隊任務的持續條件。聯合任務描述1個協作團隊的所有成員共同完成某個任務;同時相信每個成員都在努力完成該任務。1個團隊就某個聯合任務做出聯合承諾以后,團隊中每個Agent必須將自己完成τ中所承擔的那部分活動已經實現或實現不了的情況這一私有信念轉化為團隊的共同信念。
基于共同使命的編隊協作框架中,當聯合目標、聯合任務的條件已經不成立,而通知其他實體Agent又不可能時,實體Agent根據共同使命要求,可以違背對聯合目標、聯合任務的承諾,執行新的行動。
當實體Agent選擇了目標可達世界中某個節點作為當前目標,并決定用協同方法解決的時候,就會產生協同需求。若該實體Agent是編隊指揮Agent,則采用分布計劃集中規劃的方法;若該實體Agent為執行Agent,則采用協同請求的協商方法;若該實體Agent為中層指揮Agent,則先判斷是否僅使用所轄的兵力完成任務,若是則采用分布計劃集中規劃的方法,否則采用協同協商請求的方法。
2)分布計劃集中規劃協作方法
命令Command主要有MsnCom、GoalCom、TaskCom 3種形式。以下達TaskCom(任務命令)為例,指揮Agent需要根據目標進行任務規劃,將規劃方案在下屬中進行分解,形成任務命令,然后將任務傳給團隊中的各Agent,各Agent以分布的形式并發執行任務,這樣聯合任務形式JTask(Θ,τ,λ)就形成了。在任務執行過程中,指揮Agent負責監控任務的執行,當出現意外情況時還需重新規劃[5],生成新的規劃方案。這種協調方法是編隊協同反潛的主要方法,各級指揮Agent擔任構造、分發和監控任務執行的功能。
3)協同請求的協商方法
軍事中協商一般被看作是2個互不隸屬和制約的平行單位指揮員,為實現共同目標而自動建立相互關照、彼此策應的協同關系。編隊海上作戰,由于時間緊迫,實體數量不多,指揮關系清晰,發生嚴格軍事意義上協商的情況比較少。而多Agent理論中,協商的含義有多種理解,相互協商的Agent之間的關系也沒有嚴格約定,所有協商活動的目的是在1組獨立工作的主體間構建協作[6]。本文在尊重軍事上協商原則的基礎上,根據多Agent協商的含義,從協商的廣義上來探討實體Agent協同請求的協商問題。
編隊作戰中,下級有協同需求時一般都向上級請示,上級根據情況指派某些實體Agent進行協同;在特殊情況下,如與上級通信中斷、時間緊急來不及上報或在上級授權的情況下,實體Agent可直接向某些同級Agent發出協同請求,通過協商形成協作。
在協同請求中,如果實體Agent是以具體的作戰任務作為請求的內容,則協同關系建立的同時,聯合任務形式JTask(Θ,τ,λ)也就建立了,主動發出協同請求的Agent實現協作團隊形式Θ形式行動中的協調控制功能。如果Agent是以達到某個目標作為請求的內容,則協作團隊形式Θ建立時,聯合目標形式JGoal(Θ,δ,?)也建立了,主動發出協同請求的Agent擔任任務規劃與協調控制的功能。
4 結語
根據海軍信息化建設和提高聯合作戰能力的要求,編隊必須提高協同反潛作戰能力,以有效搜索、攻擊復雜海戰場條件下的敵方潛艇。編隊反潛過程中,存在多種樣式的協同,任務也隨著戰場態勢的變化需要進行重新規劃和分配,因此非常有必要在編隊協同反潛作戰模型中建立更加逼真靈活的協同機制。
本文根據編隊作戰實體的使命任務,設計出符合Agent基本結構和作戰實體特點的混合型實體Agent結構;在基于BDI的Agent認知模型基礎上,提出更符合編隊作戰實體特點的基于MBGT的實體Agent認知模型,并對該認知模型的主要心智狀態進行分析;運用組織觀點分析編隊多Agent系統的特點、關系與共同使命,結合多Agent協作理論,提出基于共同使命的編隊反潛協同模型框架,并在該框架下分析實體間的協商協作方法。
應用本文提出的編隊協同反潛仿真模型,在HLA仿真平臺上初步實現了協同反潛的仿真系統原型,并以編隊對潛應召搜索為使命背景,仿真實現編隊協同反潛。仿真過程中,編隊實體能根據仿真戰場環境條件,自然恰當地實現多種戰術協同樣式。
[1]張德群.艦艇編隊作戰指揮整體性原則及其運用初探[J].艦載武器,2001,(3):5 -7.ZHANG De-qun.The whole principle and application of ship fleet combat command[J].Shipborne Weapons,2001(3):5-7.
[2]姜道洪,劉會民.作戰協同概論[M].北京:國防大學出版社,2004.JIANG Dao-hong,LIU Hui-min.Conceptionofcombat cooperation[M].Beijing:National Defense University Press,2004.
[3]宋一兵.計算機生成兵力中智能體技術與應用研究[D].黑龍江:哈爾濱工程大學,2006.SONG Yi-bing.Research on agenttechnology and application in computer generated force[D].Harbin:Harbin Engineering University,2006.
[4]齊歡.系統建模與仿真[M].北京:清華大學出版社,2004.QI Huan.System modeling and simulation[M].Beijing:Tsinghua University Press,2004.
[5]WICKLER G J.Using expressive and flexible action representations to reason about capabilities for intelligent agent cooperation[D].Edinburgh:University of Edinburgh,1999.
[6]史忠植.智能主體及其應用[M].北京:科學出版社,2000.SHI Zhong-zhi.Intelligent agent and application[M].Beijing:Science Press,2000.
[7]尹全軍.基于多Agent的計算機生成兵力建模與仿真[D].長沙:國防科學技術大學,2005.YIN Quan-jun.Modelling and simulation of computer generated forced based on multi-agent[D].Changsha:National University of Defense Technology,2005.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
