IFF應(yīng)答信號(hào)實(shí)時(shí)檢測技術(shù)
2012-10-20 02:27:56何玉紅
無線電通信技術(shù) 2012年2期
趙 琨,何玉紅
(1.西安電子科技大學(xué),陜西西安 710071;2.中國電子科技集團(tuán)公司第五十四研究所,河北石家莊 050081)
0 引言
無源被動(dòng)探測系統(tǒng)通過接收、分析目標(biāo)發(fā)射的電磁信號(hào)來確定目標(biāo)的各類參數(shù),自身不需要發(fā)射電磁信號(hào),因此許多國家都開始發(fā)展無源探測技術(shù)。IFF系統(tǒng)作為現(xiàn)代戰(zhàn)爭中識(shí)別敵我的一種重要手段,廣泛裝備于軍用飛機(jī)、艦艇等作戰(zhàn)武器平臺(tái),同時(shí)也安裝在民用飛機(jī)上,用于空中交通管制。IFF系統(tǒng)的廣泛使用,也使得IFF信號(hào)成為無源被動(dòng)探測的主要目標(biāo)之一。通過對(duì)IFF信號(hào)的實(shí)時(shí)檢測與測量,可以為無源被動(dòng)探測提供有利的數(shù)據(jù),進(jìn)行目標(biāo)識(shí)別、定位和跟蹤等,而這些功能都對(duì)實(shí)時(shí)性的要求非常高,因此,該文將對(duì)IFF系統(tǒng)應(yīng)答信號(hào)實(shí)時(shí)檢測技術(shù)進(jìn)行分析。
1 IFF應(yīng)答信號(hào)特征
IFF信號(hào)屬于二次雷達(dá)信號(hào),用固定點(diǎn)頻進(jìn)行詢問和應(yīng)答,詢問頻率為1030 MHz,應(yīng)答頻率為1090 MHz,主要用于對(duì)雷達(dá)檢測到的目標(biāo)進(jìn)行屬性判別。其詢問和應(yīng)答脈沖采用脈沖幅度調(diào)制(PAM),不同工作模式的IFF信號(hào)的脈沖寬度、脈沖間隔及框架脈沖結(jié)構(gòu)不同,不同目標(biāo)發(fā)射的IFF信號(hào)則可通過信息碼進(jìn)行區(qū)分。因此,通過對(duì)IFF信號(hào)的實(shí)時(shí)檢測和測量,得到脈沖寬度和間隔,即可進(jìn)行模式識(shí)別和多目標(biāo)分選,獲取其輻射源目標(biāo)的有關(guān)信息。典型的信號(hào)時(shí)域波形如圖1所示。
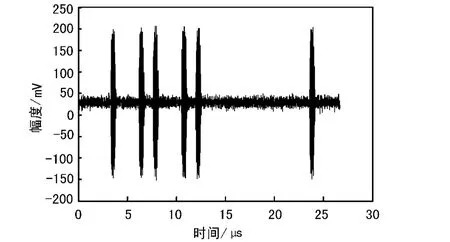
圖1 典型IFF應(yīng)答信號(hào)時(shí)域圖
IFF應(yīng)答信號(hào)的載頻為已知的1090 MHz,它是一系列的短脈沖序列經(jīng)過載波調(diào)制而成。常見的幾種IFF應(yīng)答信號(hào)規(guī)格與技術(shù)參數(shù)如表1所示。
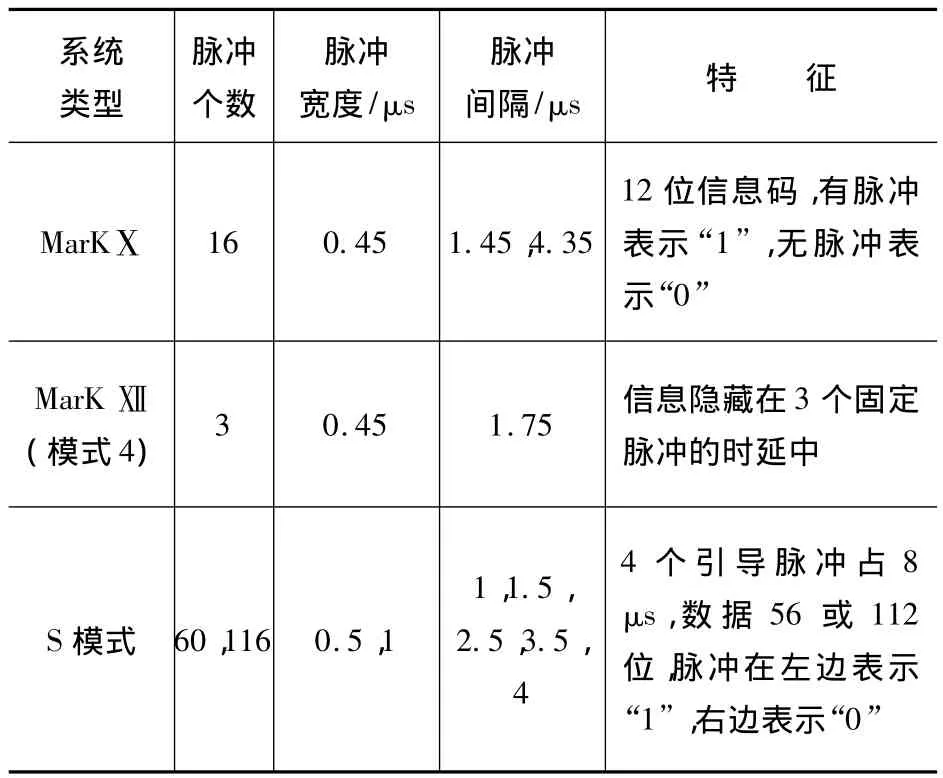
表1 IFF應(yīng)答信號(hào)參數(shù)
IFF應(yīng)答信號(hào)的數(shù)學(xué)表達(dá)式為:

式中,A(t)為IFF信號(hào)的基帶脈沖序列,f0為載波頻率,φ0為載波初始相位。經(jīng)過中頻采樣后得到的敵我識(shí)別信號(hào)表達(dá)式為:

從式(2)可以看出,只要提取出脈沖信號(hào)的包絡(luò)函數(shù)A(n),并測量其到達(dá)、結(jié)束時(shí)間,即可得到脈沖寬度和脈沖間隔等參數(shù),如圖2所示。
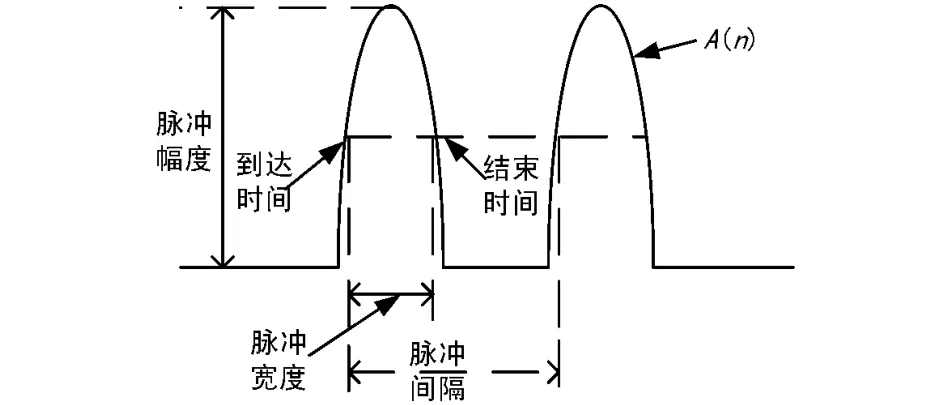
圖2 脈沖參數(shù)
2 IFF應(yīng)答信號(hào)實(shí)時(shí)檢測技術(shù)
根據(jù)IFF應(yīng)答信號(hào)特征,采用基于零中頻的時(shí)域信號(hào)檢測技術(shù)進(jìn)行實(shí)時(shí)脈沖檢測,具體流程如下:中頻輸入信號(hào)經(jīng)模數(shù)轉(zhuǎn)換(A/D)、抗混疊濾波和包絡(luò)檢波后,與本地設(shè)置好的檢測幅度門限進(jìn)行比較(信號(hào)初測),當(dāng)判定有超過門限的信號(hào)存在時(shí),則進(jìn)行脈沖信號(hào)的精確參數(shù)測量(包括脈沖幅度、到達(dá)時(shí)間和脈沖寬度),根據(jù)脈沖寬度進(jìn)行第2次判決,最后輸出符合敵我識(shí)別信號(hào)特征的脈沖參數(shù),為脈沖信號(hào)模式識(shí)別、多目標(biāo)分離和解調(diào)等后處理提供數(shù)據(jù),如圖3所示。
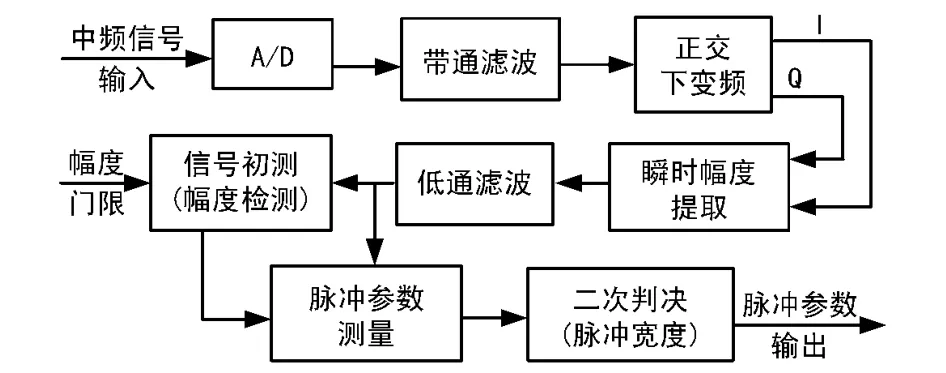
圖3 IFF應(yīng)答信號(hào)實(shí)時(shí)檢測流程
由于信號(hào)檢測對(duì)實(shí)時(shí)性的要求很高,適合用FPGA進(jìn)行工程實(shí)現(xiàn)。因此,在設(shè)計(jì)中不僅要考慮如何快速準(zhǔn)確地提取脈沖信號(hào)參數(shù),還要考慮算法在硬件電路中的可實(shí)現(xiàn)性。下面就IFF應(yīng)答信號(hào)實(shí)時(shí)檢測及參數(shù)測量技術(shù)中的幾個(gè)關(guān)鍵問題進(jìn)行討論。
3 實(shí)時(shí)檢測關(guān)鍵技術(shù)
3.1 正交下變頻
從一個(gè)實(shí)信號(hào)的解析表示(正交分解)可以很容易獲得信號(hào)的瞬時(shí)幅度,因此,首先采用正交下變頻技術(shù)將中頻信號(hào)轉(zhuǎn)化為解析信號(hào)。數(shù)字信號(hào)的正交變換可以采用數(shù)字混頻的方法:采樣序列X(n)與2個(gè)正交序列cos(ω0n)和sin(ω0n)相乘,再進(jìn)行低通濾波,這種方法適合于信號(hào)中頻變化的情況,并且實(shí)現(xiàn)中占用硬件資源較多。IFF應(yīng)答信號(hào)在載頻是固定的,因此,可以采用基于多相濾波的數(shù)字正交變換方法得到其解析信號(hào)。基于多相濾波的正交變換方法,不需要數(shù)字混頻器,多相濾波器的階數(shù)也比混頻后的低通濾波器少,非常適合工程應(yīng)用。該方法需要輸入信號(hào)頻率f0與采樣頻率fs有式(3)所示的關(guān)系:

基于多相濾波的正交變換算法實(shí)現(xiàn)方法如圖4所示,詳細(xì)推導(dǎo)過程見參考文獻(xiàn)[1]。
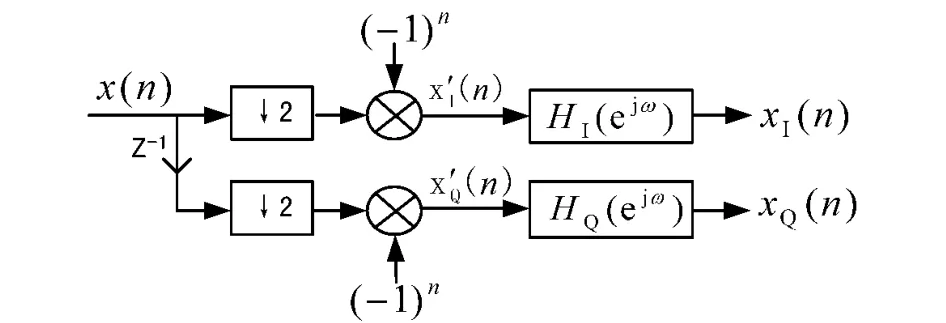
圖4 正交變換的多相濾波實(shí)現(xiàn)

3.2 包絡(luò)檢波
包絡(luò)檢波的目的是提取信號(hào)的瞬時(shí)幅度信息。經(jīng)過正交下變頻后,得到I、Q兩路零中頻正交信號(hào):

對(duì)這2路信號(hào)求模值:

再經(jīng)過低通濾波,濾除高頻分量帶來的抖動(dòng),就可以得到較為平滑的信號(hào)包絡(luò)A(n)。
IFF信號(hào)的檢測對(duì)實(shí)時(shí)性要求很高,需要硬件電路實(shí)現(xiàn),而式(6)中的運(yùn)算直接用硬件設(shè)計(jì)實(shí)現(xiàn)較為復(fù)雜,因此采用基于坐標(biāo)旋轉(zhuǎn)思想的CORDIC算法[4]。CORDIC算法的基本思想是將一個(gè)旋轉(zhuǎn)過程分解為一系列的旋轉(zhuǎn),如式(7)所示,將旋轉(zhuǎn)角θ進(jìn)行分解:

式中,{αn}為基本角度集,δn=±1;第n次旋轉(zhuǎn)的角度大小為αn,旋轉(zhuǎn)方向由δn確定;N的大小與逼近程度有關(guān)。理想情況下N=∞,但實(shí)際中進(jìn)行有限次旋轉(zhuǎn)也可以達(dá)到一定的精度。第n次旋轉(zhuǎn)運(yùn)算為:

如果選擇角度集為{αn=arctan(2-n)},那么:

如果不考慮比例因子cos(αn),CORDIC的基本旋轉(zhuǎn)運(yùn)算可簡化為:

從上式可以看出,第n步旋轉(zhuǎn)運(yùn)算只需移位和加減法運(yùn)算即可,非常適合硬件電路實(shí)現(xiàn)。
3.3 脈沖參數(shù)測量
脈沖參數(shù)測量主要是獲取脈沖信號(hào)的幅度、到達(dá)時(shí)間、結(jié)束時(shí)間及脈沖間隔等參數(shù),從而為IFF應(yīng)答信號(hào)檢測、模式識(shí)別和多目標(biāo)分選提供依據(jù)。
由于接收到的脈沖信號(hào)強(qiáng)弱不同,取脈沖峰值一半的位置作為脈沖到達(dá)時(shí)間的測量點(diǎn)。此門限隨實(shí)際接收信號(hào)強(qiáng)弱自適應(yīng)變化,因此測量得到的脈沖到達(dá)/結(jié)束時(shí)間更為準(zhǔn)確可靠。
采樣數(shù)據(jù)是時(shí)間離散的,按上述方法計(jì)算出來的脈沖到達(dá)/結(jié)束時(shí)間很可能位于2個(gè)采樣點(diǎn)中間的某個(gè)時(shí)刻,如果粗略選擇較為接近的采樣時(shí)刻作為脈沖到達(dá)/結(jié)束時(shí)間,會(huì)帶來比較大的誤差。由于2個(gè)采樣點(diǎn)間的間隔足夠小,并且從減小硬件設(shè)計(jì)難度方面考慮,可采用在2個(gè)采樣點(diǎn)間線性插值的方法來得到更為精確的時(shí)間。設(shè)A(xa,ya)、B(xb,yb)為2個(gè)相鄰的采樣點(diǎn),C(xc,yc)為落在A、B兩點(diǎn)之間的脈沖到達(dá)/結(jié)束點(diǎn)。yc已知為脈沖峰值的一半,則求脈沖到達(dá)/結(jié)束時(shí)間的問題歸結(jié)為求xc的值。根據(jù)相似三角形原理有:

由此得到xc的計(jì)算公式:

4 實(shí)驗(yàn)驗(yàn)證
由上節(jié)的討論可以看出,IFF信號(hào)實(shí)時(shí)檢測過程的數(shù)據(jù)處理量大,對(duì)速度要求高,但是通過選用適合的算法使得運(yùn)算結(jié)構(gòu)相對(duì)比較簡單,因此適合采樣FPGA實(shí)現(xiàn)。FPGA具有并行工作模式,可同時(shí)兼顧速度及靈活性。FPGA實(shí)現(xiàn)IFF信號(hào)實(shí)時(shí)檢測的流程如圖5所示。
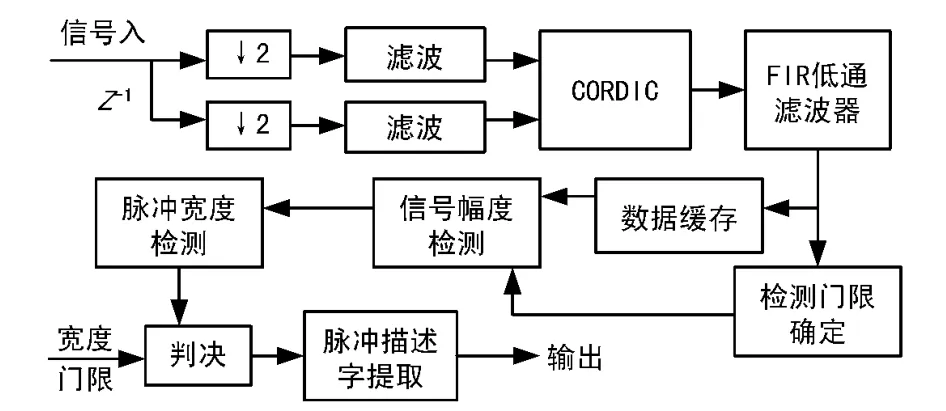
圖5 FPGA實(shí)現(xiàn)流程
采樣信號(hào)經(jīng)過正交下變頻、CORDIC運(yùn)算和低通濾波后得到平滑的脈沖包絡(luò),利用脈沖包絡(luò)確定信號(hào)檢測門限并進(jìn)行信號(hào)幅度檢測,對(duì)幅度超過檢測門限的信號(hào)進(jìn)一步進(jìn)行脈沖寬度檢測,最終根據(jù)脈沖寬度判定信號(hào)是否IFF應(yīng)答信號(hào),并提取符合條件的信號(hào)參數(shù)(脈沖描述字)。
以上實(shí)現(xiàn)流程在FPGA中進(jìn)行編程實(shí)現(xiàn),占用slice資源7188個(gè)。脈沖參數(shù)測量的結(jié)果用于時(shí)差定位系統(tǒng),得到的時(shí)差測量誤差小于20 ns。
5 結(jié)束語
IFF應(yīng)答信號(hào)實(shí)時(shí)檢測技術(shù)利用基于多相濾波的正交變換得到零中頻I、Q信號(hào);用CORDIC算法簡化了對(duì)FPGA實(shí)現(xiàn)來說相當(dāng)繁瑣的求平方根的過程;取脈沖頂點(diǎn)幅度的一半位置作為脈沖寬度、脈沖到達(dá)時(shí)間的檢測點(diǎn),并利用線性插值提高時(shí)間測量精度。
[1]江春燕,周勝源,陳星.基于軟件無線電多相濾波的數(shù)字正交變換技術(shù)[J].電子設(shè)計(jì)工程,2010,18(6):89-90.
[2]孫凌宇,羅靜,屈金佑.混疊敵我識(shí)別信號(hào)分離算法研究[J].無線電工程,2011,41(1):18-21.
[3]錢眺,玉龍,查榮.IFF信號(hào)的分析與識(shí)別研究.雷達(dá)與對(duì)抗[J].2008(3):45-47.
[4]胡海華,楊芳,時(shí)華杰.基于CORDIC算法的AM基帶解調(diào)方法[J].技術(shù)交流,2010(3):39-41.
[5]聞鑫.MK XII敵我識(shí)別系統(tǒng)及其對(duì)抗[J].艦船電子對(duì)抗,2006,29(5):18-23.
[6]艾名舜,李釗.雷達(dá)脈沖信號(hào)檢測及參數(shù)估計(jì)新方法[J].無線電工程,2007,37(4):14-36.
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12