一種新型無(wú)線傳感器網(wǎng)絡(luò)分布式定位算法
2012-10-20 02:28:00楊小勇
無(wú)線電通信技術(shù) 2012年3期
楊小勇,楊 榮,李 彬
(1.國(guó)家無(wú)線電頻譜管理研究所,陜西西安 710061;2.西安交通大學(xué)智能網(wǎng)絡(luò)與網(wǎng)絡(luò)安全教育部重點(diǎn)實(shí)驗(yàn)室,陜西西安 710049)
0 引言
在無(wú)線傳感器網(wǎng)絡(luò)中,傳感器節(jié)點(diǎn)定位是無(wú)線傳感器網(wǎng)絡(luò)應(yīng)用的重要條件。定位方式種類(lèi)繁多,但總體分2大類(lèi):一種是基于非測(cè)距的(Rangefree),例如質(zhì)心法[1]、DV-Hop 算法[2]、APIT 算法[3];一種是基于測(cè)距的(Range-based),例如 RSSI[4]、AOA[5]、OA[6]、DOA[7]等定位算法。Rangefree方法利用傳感器節(jié)點(diǎn)之間信息交互獲得位置信息,設(shè)備簡(jiǎn)單,但定位精度較差;Range-based方法利用無(wú)線電測(cè)距,例如利用無(wú)線電相位信息或無(wú)線電信號(hào)強(qiáng)度(RSSI)隨距離衰減的特性。利用無(wú)線電信號(hào)強(qiáng)度隨距離衰減特性的定位算法,設(shè)備簡(jiǎn)單但精度較差;利用相位算法精確度較好,但造價(jià)較高且設(shè)備復(fù)雜,能耗高。
在實(shí)際應(yīng)用中,通過(guò)飛機(jī)或炮彈等設(shè)備將無(wú)線傳感器節(jié)點(diǎn)撒布到人難以到達(dá)的地方(如無(wú)人區(qū))是一種重要的布置傳感器節(jié)點(diǎn)的方式,它要求傳感器節(jié)點(diǎn)不但成本低、體積小、能耗低,還需具有數(shù)量大、分布區(qū)域廣的特點(diǎn)。這里提出的定位方法利用了飛機(jī)輔助手段,對(duì)大量未知節(jié)點(diǎn)進(jìn)行分布式定位,正是針對(duì)以上應(yīng)用場(chǎng)景的特點(diǎn)提出的。
1 定位系統(tǒng)的網(wǎng)絡(luò)結(jié)構(gòu)
本文提出的射頻干涉與測(cè)量多普勒頻偏相結(jié)合的節(jié)點(diǎn)定位方法,利用一個(gè)固定錨節(jié)點(diǎn)和一個(gè)移動(dòng)錨節(jié)點(diǎn)(如飛機(jī))形成射頻干涉場(chǎng),移動(dòng)錨節(jié)點(diǎn)水平勻速移動(dòng)產(chǎn)生多普勒效應(yīng)。2個(gè)發(fā)射節(jié)點(diǎn)發(fā)射的射頻信號(hào)頻率十分接近,接收節(jié)點(diǎn)收到的疊加信號(hào)具有低頻包絡(luò);同時(shí)由于多普勒效應(yīng)[8]的存在,低頻包絡(luò)信號(hào)的頻率會(huì)隨著移動(dòng)錨節(jié)點(diǎn)的移動(dòng)發(fā)生變化。各節(jié)點(diǎn)可通過(guò)測(cè)量自身低頻RSSI(接收信號(hào)場(chǎng)強(qiáng)指示)信號(hào)的瞬時(shí)頻率的變化規(guī)律獲得未知節(jié)點(diǎn)與飛行路徑相對(duì)位置信息。移動(dòng)錨節(jié)點(diǎn)交叉運(yùn)動(dòng),融合多個(gè)相對(duì)位置信息,未知節(jié)點(diǎn)就可以獲得自己的絕對(duì)位置信息。
首先介紹定位系統(tǒng)的網(wǎng)絡(luò)結(jié)構(gòu),該定位系統(tǒng)由一個(gè)固定錨節(jié)點(diǎn)、一個(gè)移動(dòng)錨節(jié)點(diǎn)及大量未知節(jié)點(diǎn)組成。固定錨節(jié)點(diǎn)與移動(dòng)錨節(jié)點(diǎn)發(fā)射頻率相近的單頻信號(hào),信號(hào)強(qiáng)度足以覆蓋全網(wǎng)。移動(dòng)錨節(jié)點(diǎn)配備有GPS設(shè)備,并實(shí)時(shí)廣播自己的GPS信息。移動(dòng)錨節(jié)點(diǎn)(如直升飛機(jī)或無(wú)人駕駛機(jī))在定位區(qū)域內(nèi)做低空交叉直線飛行,網(wǎng)絡(luò)結(jié)構(gòu)如圖1所示。圖1中A為移動(dòng)錨節(jié)點(diǎn),B為固定錨節(jié)點(diǎn),m為待定位的無(wú)線傳感器節(jié)點(diǎn)。AA'、A'A″是移動(dòng)錨節(jié)點(diǎn)的2條飛行路線,箭頭指向的是運(yùn)動(dòng)的方向。p、q分別是飛行路線上過(guò)點(diǎn)m作的垂線的垂足,移動(dòng)錨節(jié)點(diǎn)運(yùn)動(dòng)距離足夠長(zhǎng)。
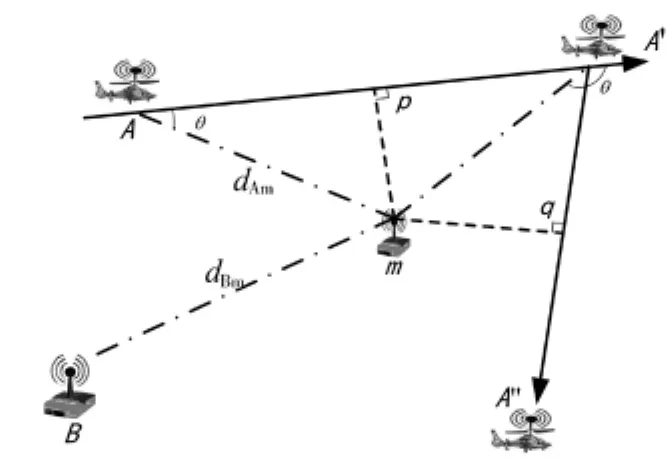
圖1 定位系統(tǒng)的網(wǎng)絡(luò)結(jié)構(gòu)示意圖
這里采用的定位方式是二維定位,以下部分都是將飛行路徑與未知節(jié)點(diǎn)映射到二維平面分析的。未知節(jié)點(diǎn)接收射頻干涉信號(hào),由于移動(dòng)錨節(jié)點(diǎn)移動(dòng),未知節(jié)點(diǎn)處測(cè)得的射頻干涉信號(hào)的頻率中含有多普勒頻移,分析頻率的變化從而實(shí)現(xiàn)定位是本算法的核心內(nèi)容。
2 射頻干涉原理
移動(dòng)錨節(jié)點(diǎn)A和靜止錨節(jié)點(diǎn)B分別發(fā)射頻率相近(如相差1 kHz左右)的單頻信號(hào) cos(2πfAt+φA)和cos(2πfBt+φB)。假設(shè)在LOS環(huán)境中的某個(gè)時(shí)刻,未知節(jié)點(diǎn)m與A、B的初始距離分別為dAm和dBm,如圖1所示。節(jié)點(diǎn)m接收的射頻干涉信號(hào)可以表示為:

對(duì)射頻干涉信號(hào)進(jìn)行下變頻得到的基帶復(fù)信號(hào)為:

式中,fn為進(jìn)行下變頻時(shí)節(jié)點(diǎn)的本振頻率。
所以,節(jié)點(diǎn)m得到的接收?qǐng)鰪?qiáng)指示(RSSI)信號(hào)可以表示為:

由式(13)可知RSSI信號(hào)的頻率為‖fA-fB‖,fA、fB十分接近(如相差1 kHz),節(jié)點(diǎn)利用自身的簡(jiǎn)單設(shè)備就可以實(shí)現(xiàn)低頻干涉信號(hào)頻率的測(cè)量。該方法的優(yōu)點(diǎn)是很多芯片都具有RSSI的輸出,采用低速的AD即可解決RSSI信號(hào)的采集問(wèn)題,不需要使用額外的收發(fā)設(shè)備。
3 多普勒頻偏分析和處理
在圖1所示的網(wǎng)絡(luò)中,移動(dòng)錨節(jié)點(diǎn)在定位區(qū)域上空勻速直線飛行時(shí)產(chǎn)生多普勒效應(yīng),未知節(jié)點(diǎn)收到的RSSI信號(hào)的頻率會(huì)隨著移動(dòng)錨節(jié)點(diǎn)的移動(dòng)發(fā)生變化,節(jié)點(diǎn)通過(guò)測(cè)量實(shí)時(shí)地獲得RSSI信號(hào)的頻率。需要注意的是,圖1所示的二維平面是以未知節(jié)點(diǎn)和飛行路徑確定的二維平面,故垂點(diǎn)位置信息為經(jīng)緯度信息,在定位時(shí)要求移動(dòng)錨節(jié)點(diǎn)飛行的距離足夠長(zhǎng)。
根據(jù)多普勒頻移公式,未知節(jié)點(diǎn)獲得的RSSI信號(hào)的頻率為:
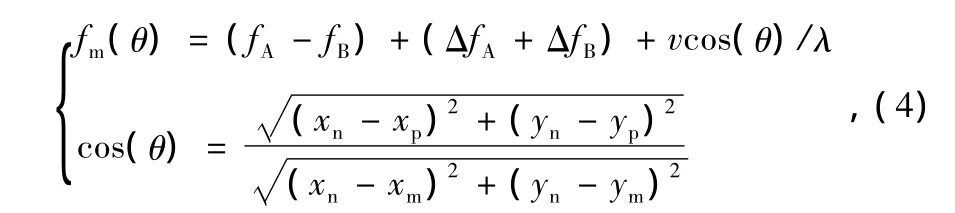
fA與fB分別是移動(dòng)錨節(jié)點(diǎn)和固定錨節(jié)點(diǎn)發(fā)射的射頻信號(hào)頻率,ΔfA與ΔfB是由本地晶體振蕩器引起的頻偏。移動(dòng)錨節(jié)點(diǎn)的飛行速度設(shè)為v,如圖1所示θ為連線 Am 與飛行路線的夾角。(xn,yn)、(xp,yp)、(xm,ym)分別為 A、p、m 所處位置坐標(biāo)。式(4)中fm(θ)對(duì)θ求導(dǎo)可得:

由式(5)可知,RSSI信號(hào)的頻率變化時(shí)斜率絕對(duì)值最大點(diǎn)對(duì)應(yīng)的θ為90度,即對(duì)應(yīng)的點(diǎn)xn=xp,yn=yp。為了得到斜率絕對(duì)值最大點(diǎn),對(duì)移動(dòng)錨節(jié)點(diǎn)的移動(dòng)路徑進(jìn)行等間距采樣,根據(jù)式(6)對(duì)采樣點(diǎn)的頻率做差分得到的曲線如圖2所示。

圖2 對(duì)采樣點(diǎn)的頻率進(jìn)行差分
圖2的曲線在垂足處有個(gè)陡然的上升,峰值點(diǎn)為垂足位置。由于移動(dòng)錨節(jié)點(diǎn)實(shí)時(shí)廣播自己的GPS信息,未知節(jié)點(diǎn)可獲知這個(gè)垂足GPS信息,從而為下一步定位算法提供輔助信息。對(duì)fn(θ)做差分,在找到頻率變化最大點(diǎn)的坐標(biāo)的同時(shí),可以有效地消除頻偏帶來(lái)的誤差,從而避免了復(fù)雜的頻偏估計(jì)算法,使整個(gè)定位算法簡(jiǎn)單實(shí)用。
該文的定位算法是通過(guò)獲得圖2曲線中最高點(diǎn)來(lái)計(jì)算未知節(jié)點(diǎn)相對(duì)位置信息的,因此可以對(duì)圖2的曲線作平滑處理,使得最高點(diǎn)的判斷更為準(zhǔn)確。
4 節(jié)點(diǎn)位置估計(jì)原理
由于未知節(jié)點(diǎn)實(shí)時(shí)接收移動(dòng)錨節(jié)點(diǎn)的GPS廣播信息,故可以得到移動(dòng)路徑與未知節(jié)點(diǎn)的垂線的垂足(圖1中的p、q)處的GPS信息和移動(dòng)節(jié)點(diǎn)移動(dòng)的方向。移動(dòng)錨節(jié)點(diǎn)按圖1所示的路線移動(dòng)。垂足p和q的GPS信息可由第3部分介紹的方法得到,過(guò)點(diǎn)p和q作移動(dòng)路徑的垂線,2個(gè)垂線的交點(diǎn)即為未知節(jié)點(diǎn)的位置。設(shè)未知節(jié)點(diǎn)坐標(biāo)(x,y),p點(diǎn)坐標(biāo) (px,py),q 點(diǎn)坐標(biāo) (qx,qy),m1、m2分別是 2條飛行路徑的斜率,可得式(7),求解式(7)就可以得到節(jié)點(diǎn)的位置。


該方法利用干涉測(cè)頻,節(jié)點(diǎn)僅需測(cè)量低頻干涉信號(hào),這降低了設(shè)備硬件的復(fù)雜度;通過(guò)對(duì)接收頻率的差分,可以簡(jiǎn)單有效地消除頻偏的影響;而利用多次飛行定位,定位的準(zhǔn)確度得以提高。在整個(gè)定位過(guò)程中,未知節(jié)點(diǎn)只是遠(yuǎn)距離接收錨節(jié)點(diǎn)大功率廣播的信號(hào)而無(wú)需發(fā)送,能耗較低,適合于大規(guī)模網(wǎng)絡(luò)中進(jìn)行定位。
5 實(shí)驗(yàn)仿真
在仿真中,假設(shè)16個(gè)未知節(jié)點(diǎn)散布在1 km的二維平面范圍之內(nèi),移動(dòng)錨節(jié)點(diǎn)為直升機(jī)或者無(wú)人駕駛機(jī),移動(dòng)錨節(jié)點(diǎn)實(shí)時(shí)廣播GPS信息并做低空飛行,飛行高度為170 m,發(fā)射的射頻信號(hào)頻率6 GHz,移動(dòng)速度為60 m/s,固定錨節(jié)點(diǎn)發(fā)射頻率比移動(dòng)錨節(jié)點(diǎn)高200 Hz,未知節(jié)點(diǎn)頻率瞬時(shí)估計(jì)誤差為隨機(jī)誤差,方差為2。算法中作差分計(jì)算的間隔是1 m,并且為了計(jì)算方便,設(shè)定移動(dòng)錨節(jié)點(diǎn)在待定位區(qū)域上空做東西方向飛行和南北方向飛行;交叉飛行完成后,就可對(duì)未知節(jié)點(diǎn)做出定位。為了提高定位精度,可在定位區(qū)域上空作多次交叉飛行,仿真中假設(shè)東西飛行12次,南北飛行12次,每次東西飛行路徑相隔70 m,南北亦同。圖3(a)為定位的結(jié)果,圓圈為待定位節(jié)點(diǎn)的真實(shí)位置,小十字為估計(jì)位置。可以看出多次定位的結(jié)果均分布在真實(shí)值周?chē)瑢⑸鲜鲞^(guò)程重復(fù)50次,即取12*16*50次統(tǒng)計(jì),得出誤差如圖3(b),結(jié)果表明誤差范圍在4 m以?xún)?nèi),平均誤差為2 m,考慮到自身作差分的量化誤差是1 m,認(rèn)為平均誤差為3 m。
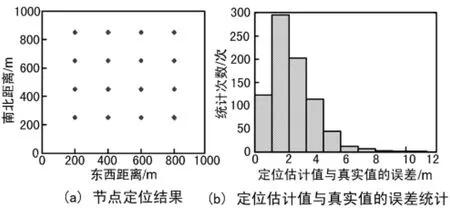
圖3 仿真實(shí)驗(yàn)的定位結(jié)果和誤差統(tǒng)計(jì)
飛行路徑與未知節(jié)點(diǎn)之間的距離為定值時(shí),錨節(jié)點(diǎn)的移動(dòng)速度與定位誤差的關(guān)系如圖4所示,其中設(shè)定未知節(jié)點(diǎn)頻率估計(jì)方差為2;飛行路徑與未知節(jié)點(diǎn)之間的距離為定值時(shí),未知節(jié)點(diǎn)頻率估計(jì)方差與定位誤差的關(guān)系如圖5所示。
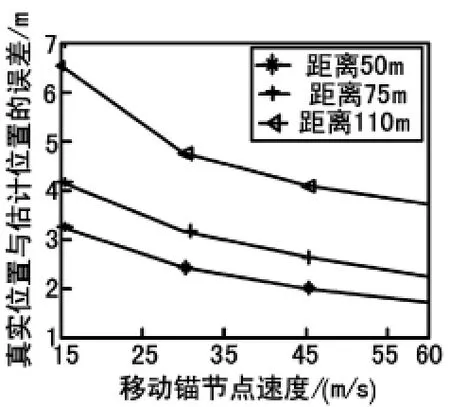
圖4 移動(dòng)錨節(jié)點(diǎn)的移動(dòng)速度與定位誤差的關(guān)系
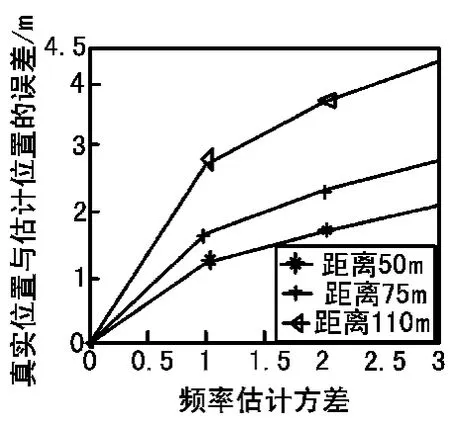
圖5 未知節(jié)點(diǎn)頻率估計(jì)方差與定位誤差的關(guān)系
在搜索圖2中的峰值時(shí),可以分別采用平滑和非平滑的方法,得到的結(jié)果如圖6所示,前者比后者可提高1 m左右的精度。圖2的峰值和飛行路徑與未知節(jié)點(diǎn)間距離d的關(guān)系如圖7所示(注:設(shè)定移動(dòng)錨節(jié)點(diǎn)移動(dòng)速度60 m/s(即直升機(jī)的飛行速度),移動(dòng)錨節(jié)點(diǎn)發(fā)射的射頻信號(hào)頻率6 GHz)。由于采用了RIPS射頻干涉的方法,檢測(cè)到的RSSI信號(hào)頻率很低(如設(shè)定為2 kHz左右),未知節(jié)點(diǎn)采用不是很昂貴的設(shè)備就可以檢測(cè)出圖2頻率的變化值。但是如圖7的仿真結(jié)果所示當(dāng)d變大時(shí),差分的峰值將會(huì)變小。當(dāng)干擾較大時(shí),距離d越遠(yuǎn),峰值的易于檢測(cè)性就越弱。因此,針對(duì)遠(yuǎn)距離、大范圍節(jié)點(diǎn)進(jìn)行定位時(shí),可采取多次網(wǎng)格式飛行,未知節(jié)點(diǎn)檢測(cè)每次飛行時(shí)獲得的圖2的峰值,當(dāng)峰值低于一定門(mén)限值時(shí),舍棄對(duì)此數(shù)據(jù)的處理。而只采用距離d較小時(shí)獲得的頻率差分信息作為定位需要的相關(guān)信息,這樣可以提取誤差小的相關(guān)信息,排除誤差大的相關(guān)信息,進(jìn)而提高定位的準(zhǔn)確度。
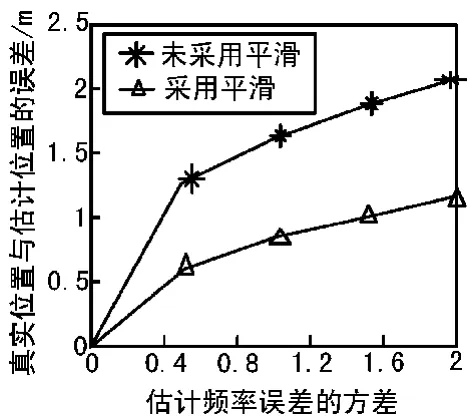
圖6 采用平滑和非平滑的方法時(shí)定位誤差的對(duì)比
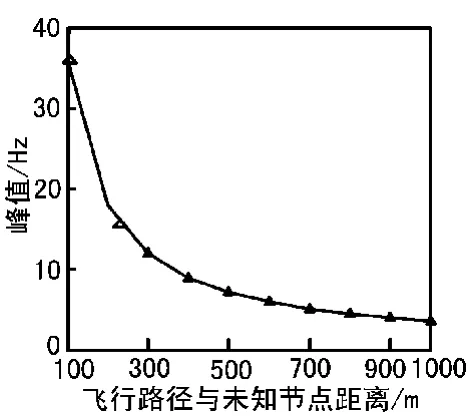
圖7 峰值和飛行路徑與未知節(jié)點(diǎn)間距離的關(guān)系
6 結(jié)束語(yǔ)
本文提出了一種射頻干涉與測(cè)量多普勒頻偏相結(jié)合的節(jié)點(diǎn)定位方法,該定位方法僅需利用節(jié)點(diǎn)的常規(guī)無(wú)線通信設(shè)備,測(cè)量信號(hào)可由射頻芯片的RSSI硬件電路提供,不需要額外的輔助測(cè)量裝備。文中的定位方法利用RSSI信號(hào)的頻率變化進(jìn)行定位,克服了以往常用的利用RSSI信號(hào)強(qiáng)度進(jìn)行定位的方法定位精度較差的缺點(diǎn)。在定位過(guò)程中,節(jié)點(diǎn)進(jìn)行位置估計(jì)不需要相鄰節(jié)點(diǎn)輔助或集中數(shù)據(jù)處理,每個(gè)節(jié)點(diǎn)即可單獨(dú)計(jì)算出各自的位置;同時(shí),巧妙地利用了差分方法來(lái)消除頻偏,避免復(fù)雜的估計(jì)頻偏算法,算法更簡(jiǎn)單,更加適合大規(guī)模和遠(yuǎn)距離定位。因此,所提出的方法是一種適用于無(wú)線傳感器網(wǎng)絡(luò)的分布式定位方法。
[1]BULUSU N,HEIDEMANN J,ESTRIN D.GPS-less Lowcost Outdoor Localization for Very Small Devices [J].IEEE Personal Communications,2000,7(5):28-34.
[2]NICULESCU D,NATH B.Ad hoc Positioning System[C]∥Conference Record of IEEE Global Telecommunications Conference,San Antonio,GLOBECOM,2001,5:58-62.
[3]HE Tian,HUANG Cheng-du,BLUM B M,et al.Rangefree Localization Schemes in Large Scale Sensor Networks[C]∥Proceedings of the 9th Annual International Conference on Mobile Computing and Networking,MOBICOM,2003:102-106.
[4]BAHL P,PADMANABHAN VN.An in-building RF-based User Location and Tracking System[C]∥Proc.of the IEEE INFOCOM,2000,2:88.
[5]HARTER A,HOPPER A,STEGGLES P,et al.The Anatomy of a Context Aware Application[C]∥Proc.of the 5th Annual ACM/IEEE Int'l Conf,2002,1:212-217.
[6]URRUELA A,PAGES-ZAMORA A,RIBA J.Divide-and-Conquer Based Closed-form Position Estimation for AOA and TDOA Measurements[C]∥IEEE International Conference on Acoustics,Speech and Signal Processing,2006,IV:72-77.
[7]GIROD L,ESTRIN D.Robust Range Estimation Using Acoustic and Multimodalsensing[C]∥ IEEE Robotics and Automation Society,2001:117-124.
[8]張渭樂(lè),殷勤業(yè),韓瑋,等.基于Doppler效應(yīng)的無(wú)線傳感器網(wǎng)絡(luò)射頻干涉定位方法[J].中國(guó)科學(xué)F輯:信息科學(xué),2009,39(8):909-917.
[9]MAROTI M,KUSY B,BALOGH G,et al.Radio Interferometric Geolocation[C]∥The 3rd International Conference on Embedded Networked Sensor Systems,San Diego,USA,2005:1-12.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
中外會(huì)展(2014年4期)2014-11-27 07:46:46
環(huán)球時(shí)報(bào)(2010-02-11)2010-02-11 13:34:15
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32