基于高速圖像處理技術的定位器坡度檢測系統
2012-10-25 06:11:04王燕國孫忠國顧世平王衛東
鐵路技術創新 2012年1期
■ 王燕國 孫忠國 顧世平 王衛東
1 研發背景
定位器坡度是一項重要的接觸網安全性檢測項目。接觸網定位裝置中(見圖1),紅色部分為定位器,綠色部分為定位管。受電弓經過定位裝置時,其對接觸網的接觸力導致接觸線及定位器有一定程度的抬升。因此,定位裝置(定位器、定位管等)的結構和安裝狀態應保證受電弓通過定位點時接觸線能在一定范圍內自由抬升,且不產生明顯硬點。為避免受電弓通過時碰撞定位器而導致打弓,造成接觸網運營事故,對定位器坡度范圍應有一定要求。
目前鐵路行業內較多使用的接觸網靜態測量儀器一般通過測量定位器兩點垂直投影高差的方法計算定位器坡度,測量精度和效率都較低。實際上,適用于160 km/h及以上運營速度的定位器坡度檢測手段在國內外一直處于空白狀態。由于缺乏高效可靠的技術手段,無論是現場靜態測量還是動態測量,對定位器坡度的檢測在接觸網施工驗收和運營維護中一直是個薄弱環節,留下了一定的安全隱患。隨著我國高速鐵路的發展和既有線提速,對定位器坡度的高速在線測量需求越來越迫切。在高速條件下對定位器坡度進行在線實時測量,一方面有利于提高測量效率,另一方面對于高速鐵路的安全保障也有十分重要的意義。中國鐵道科學研究院基礎設施檢測研究所先后研發了可運行于250 km/h和400 km/h速度下的定位器坡度檢測系統,成功解決了高速條件下對定位器坡度實時測量的技術難題。
2 系統架構
定位器坡度檢測系統采用視覺測量方法,并結合模式識別、機器學習等技術,對高性能攝像頭拍攝的接觸網運行環境視頻進行分析和信息挖掘,以獲得高速接觸網的定位器坡度數據。系統主要包括車頂的攝像裝置、用于測量的光源裝置、車內的光源控制單元、用于圖像采集處理的工控機及車下的車體振動位移補償裝置和車內的信號處理單元(主要用于補償車體側滾對測量結果造成的影響)。系統架構見圖2。
3 軟件方案
3.1 開發工具
定位器坡度采集處理軟件采用Visual Studio開發,Microsoft Visual C++為開發Win32環境程序,是面向對象的可視化集成編程系統,不但具有程序框架自動生成、靈活方便的類管理、代碼編寫和界面設計集成交互操作、可開發多種程序等優點,而且通過簡單設置就可使其生成的程序框架支持數據庫接口、OLE2、WinSock網絡和3D控制界面,還具有“語法高亮”、自動編譯及高級除錯功能等特點,可以明顯縮短程式編輯、編譯及鏈接時間,在大型軟件開發上優勢顯著。

圖1 接觸網定位裝置

圖2 定位器坡度檢測系統架構
3.2 數據處理流程
系統采用高性能圖像處理服務器,對前端攝像裝置采集的高清視頻信號和車體振動位移測量信號進行高速同步采集。視頻數據的采集處理采用多線程處理框架,用多個線程分別進行圖像采集、分析、顯示和結果保存。線程之間通過管道進行通信,利用臨界區實現對管道資源的共享。在多線程處理框架中,一個獨立的采集線程專門對圖像數據進行高速連續采集,并將其存于緩沖區中,以隊列形式等待其他線程的后續處理;一個獨立的檢測線程專門對待處理的圖像隊列進行逐個分析、檢測,并將結果存于另一緩沖區;一個獨立的結果保存線程專門進行緩沖區中檢測結果的逐個保存。在以上數據采集處理框架中,只要圖像的檢測算法運算速度足夠快,不致使不斷采集到的待處理數據溢出緩沖區,則整個系統在檢測列車高速運行過程中,可以保證對每幀圖像進行及時處理,避免丟幀現象的發生。系統的數據采集處理框架見圖3。
4 應用實例
目前,自主研制的基于高速圖像處理技術的定位器坡度檢測系統已成功安裝在CRH380A-001、CRH380B-002 2輛高速綜合檢測列車。在2011年3—5月京滬高速鐵路先導段綜合試驗中,對系統的準確性、重復性和可靠性等進行了全面驗證,其功能達到了設計目標要求,最高檢測速度達到400 km/h。系統軟件處理界面見圖4。
5 結束語
定位器坡度檢測系統不僅在國內外首次實現了160 km/h及以上運行速度下對接觸網定位器坡度的在線測量,并可在最高400 km/h運行速度下實時測量定位器坡度的定量數值,填補了重要的技術空白。系統的成功研制為接觸網施工及運營維護單位掌握定位器坡度數據提供了高效可靠的測量手段。同時,在周期性等速檢測、新建鐵路聯調聯試等工作中豐富了一項重要的接觸網安全性檢測項目,為新建高速鐵路及提速線路的行車安全提供保障,具有很好的應用價值和前景。
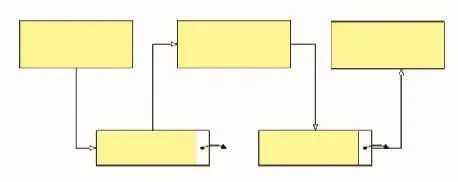
圖3 數據采集處理框架
圖4 定位器坡度檢測系統軟件處理界面
[1] 鐵道部.接觸網運行檢修規程[S].北京:中國鐵道出版社,2007
[2] 鐵道部.高速鐵路接觸網運行檢修暫行規程[S].北京:中國鐵道出版社,2011
[3] 于萬聚.高速電氣化鐵路接觸網[M].成都:西南交通大學出版社,2003
[4] 中鐵電氣化局集團有限公司.電氣化鐵道接觸網[M].北京:中國電力出版社,2003
[5] David A Forsyth,Jean Ponce. Computer Vision:A Modern Approach[M]. New Jersey:Prentice Hall,2003
[6] E R Davies. Machine Vision:Theory,Algorithms,Practicalities[M]. Third Edition. Singapore:Elsevier,2005
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
