串級控制在雙容液位系統的應用研究
2012-10-26 07:18:50白仲國
中國科技信息 2012年12期
白仲國
榆林神華能源有限責任公司,陜西 榆林 719000
串級控制在雙容液位系統的應用研究
白仲國
榆林神華能源有限責任公司,陜西 榆林 719000
本文首先介紹了雙容液位系統,通過試驗建
立了系統數學模型。然后設計了控制器并應用MATLAB軟件進行了系統仿真,并對仿真結果進行了分析,仿真結果令人滿意。最后,用“組態王”做上位組態軟件,用西門子S7-200可編程序控制器(PLC)作為下位控制器,驗證了串級控制方法的可行性和有效性,實現了預期控制目標。
雙容液位系統;串級控制;監控組態
DoubleF luid Position;CascaCdoe ntrol;monitoring configuration
引言
本文中設計了一種可以模擬多種對象特性的雙容水箱系統,雖然結構簡單,但卻是最基本的過程控制系統,是各種高級、復雜過程控制系統的基礎,具有很好的代表性和工業應用背景。文中設計的雙閉環串級控制控制系統是雙容系統精確控制的一種行之有效的控制方法。
1 雙容液位系統簡介及數學模型
1.1 雙容液位系統簡介
雙容液位系統是一個兩級液位串連系統,如圖1所示。通過上水泵給上水箱供水,用電磁閥VA1控制水流量Q1;通過電磁閥VA2控制上、下水箱之間的水流量Q2;通過電磁閥VA3控制下水箱的出水量Q3;通過液位計LT1、LT2采集水位信號作為反饋信號;通過電磁閥的開度反饋信號來確定閥的實時開度;最終通過控制器控制各閥的開度,調節兩個水箱的水位,實現水位的自動控制。
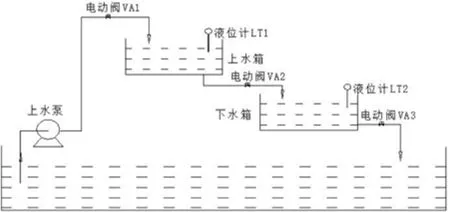
圖1 雙容液位系統流程示意圖
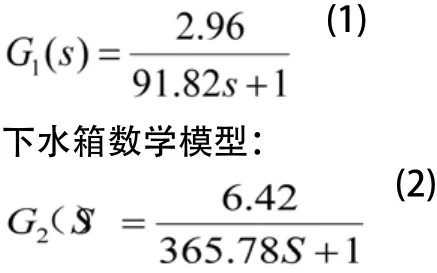
1.2 雙容液位系統數學模型
數學模型是研究事物性質的一種抽象工具,它是描述實際系統各個物理量之間關系的數學表達式。常用的數學表達式有代數方程、微分方程和差分方程等。數學模型的應用極為廣泛,它是分析、設計、預報、控制和故障診斷實際系統的基礎[1]。
在雙容液位控制系統中,控制系統所要實現的目標是控制好上、下水箱中的液位,所以兩個水箱就是控制對象,需要對兩個水箱進行建模,從而設計控制系統,分析系統的各種性能,以便達到更好的控制效果。
本文中以對應閥門開度為輸入量、液位為輸出量,通過給被控對象輸入端加M序列,采集數據。對數據進行預處理,再應用最小二乘法在MATLAB系統辨識工具箱(System Identification Toolbox)中對系統進行建模。可得到兩個水箱的傳遞函數如式(1)和(2)所示。
上水箱數學模型:
2 串級控制原理及控制器設計
2.1 串級控制原理
串級控制系統的主要結構特點在于它把兩個單回路控制系統以一定的結構形式串聯在一起,從而使工藝生產的主要參數達到更好的控制效果的控制系統,系統框圖如圖2所示。

圖2 串級控制系統框圖
從圖2中可以看出,在系統結構上,由兩個串接工作的控制器構成的雙閉環控制系統,包含主、副兩個調節器,當擾動發生時,根據擾動施加點不同進行調節,對負荷變化的適應性更強、且可以迅速克服進入副回路的二次擾動,改善系統動態性能,提高系統控制質量。
2.2 控制器的設計及系統仿真
在雙容水箱控制系統中,選擇下水箱液位作為系統的主控對象,上水箱液位作為系統的副對象,分別針對主、副對象設計調節器。主調節器選擇比例積分微分控制規律(PID),副調節器選擇比例控制率(P),輔助主調節器對于系統進行控制,整個回路構成雙環負反饋系統。
影響液位的兩個量,一是通過上水箱流入系統的流量,二是經下水箱流出系統的流量。調節這兩個流量都可以改變液位的高低。
主副回路時間常數之比應在3到10之間,以使副回路既能反應靈敏,又能顯著改善過程特性。下水箱容量滯后與上水箱相比較大,而且控制下水箱液位是系統設計的核心問題,所以選擇主對象為下水箱,副對象為上水箱。
PID調節器傳遞函數為:
PID參數整定方法主要有理論計算法和工程整定法,本文采用工程整定法對PID參數進行整定,通過試驗得出主、副調節器的PID參數分別為:
主調節器(PID)參數:Kp=4.3;Ti=476.2;Td=6;
副調節器(P)參數:Kp=25;
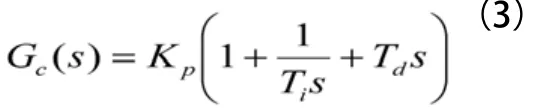
根據上述整定的調節器參數,利用MATLAB中的仿真集成環境Simulink進行仿真,直接用鼠標在模型窗口上繪制出所需要的控制系統模型,然后應用Simulink中提供的功能對控制系統進行仿真分析,仿真系統框圖如圖3所示。
圖3 控制系統仿真框圖
圖3中包含兩個控制系統,其中一個為雙閉環串級控制系統,另一個為不包含副調節器的單閉環的控制系統,兩個系統有著相同的輸入,相同的PID參數。給定值為階躍信號,大小為30%的水位,運行仿真程序后,得出曲線如圖4所示。
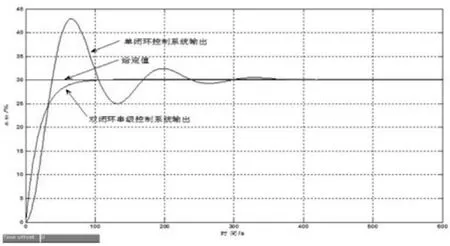
圖4 系統響應曲線圖
將圖4中的圖形進一步放大后可以讀出,單閉環控制系統輸出的峰值為42.95%,雙閉環串級控制系統輸出的峰值為30.1%。可以計算得
單閉環控制系統輸出的超調量:

雙閉環串級控制系統輸出的超調量:
另外,可以讀出
單閉環控制系統調節時間為TS單=480s;
雙閉環串級控制系統調節時間為TS雙=120s。
從超調量和調節時間兩項指標來看,雙閉環串級控制系統要遠遠優于單閉環控制系統。兩個控制器的設計可以滿足系統控制要求的,可以使系統平穩運行。
3 控制系統的實現及運行結果
本文中,雙容液位控制系統上位組態軟件采用“組態王”軟件,下位機采用西門子S7-200可編程序控制器(Programmable Logic Controller,簡稱PLC)。
在控制系統實現的過程中,組態王把PLC看作外部設備,利用PC/PPI電纜將計算機(組態王)和S7-200 PLC連接起來,PC/PPI電纜連接計算機的一端為RS-232接口,連接PLC的一端為RS-485接口(S7-200編程電纜內置RS232C/RS485轉換,帶RTS開關,光電隔離,用于S7-200與PC或DTE設備之間的連接),再根據設備配置向導完成連接過程。在運行期間,組態王通過驅動程序和PLC交換數據,包括采集數據和發送數據指令,每一個驅動程序都是一個COM對象,這種方式使通訊程序和組態王構成一個完整的系統,既保證了運行系統的高效率,同時也可以使系統能夠達到很大的規模。
計算機(組態王)和S7-200 PLC連接步驟如下:
(1)通過PC/PPI電纜上的DIP開關,選擇計算機(組態王)與PLC通訊的波特率;
(2)把PC/PPI電纜的RS-232端連接到計算機的串行通訊口(COM口);
(3)把PC/PPI電纜的RS-485端連接到PLC的通訊口0或通訊口1。
在經過調試,上位機與PLC之間通信成功后,編寫PLC控制程序和上位組態畫面及后臺程序。
編寫PLC程序前,首先確定整個系統的輸入/輸出(I/O)點數,列出I/O分配表,統籌規劃好PLC的I/O點數,既不能浪費,又要留有一定的裕量供后期擴展。根據控制需求編寫好PLC程序后,下載到PLC中,在切斷所有輸出點接線的情況下運行,以免由于程序錯誤造成誤操作,輸出點的狀態可以根據PLC上的指示燈來觀察,必要的時候可以根據輸入量的不同,用試驗電源、電阻等作為輸入信號進行測試;在反復測試,程序功能完全實現的情況下,再連接所有設備進行系統聯調。
上位組態畫面設計是力求功能齊全、美觀大方。首先在組態王工程管理器中新建一個工程,在工程瀏覽器中完成程序語言的設計、變量定義管理、連接設備的配置、開放式接口的配置、系統參數的配置等工作;在畫面開發系統中完成畫面設計、動畫連接、程序編寫等工作;所有工作完成后,在組態王TouchView運行系統中運行。通過上述工作,可實現對系統的動態監控、數據采集、參數設定、可隨時倒出、打印運行報表、觀測實時趨勢曲線和歷史記錄曲線,需要的時候還可以設置網絡通訊等操作。運行中的雙容液位系統如圖5所示。
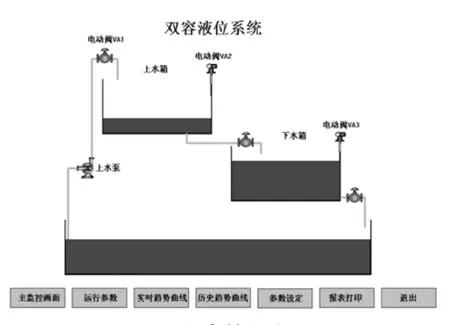
圖5 運行中的組態畫面
4 結語
本文中給出了雙容液位系統的串級控制方法,設計了主、副控制器,整定了控制器參數。然后用MATLAB軟件進行了仿真實驗,并最終用“組態王+PLC”的方式實現了雙容液位系統的串級控制,控制效果很好,達到了預期的控制要求。
[1]劉宏才.系統辨識與參數估計[M].冶金工業出版社,1994
[2]組態王6.0使用手冊.北京亞控科技發展有限公司,2001
[3]邵裕森,戴先中.過程控制工程[M].北京:機械工業出版社,2000.5
[4]Troy A. Hertog. AdvancedT echnologFy or Supervisory Control And Data Acquisition (SCADA)
The Design and Research of Cascade Control in Double Fluid Position Control System
Bai Zhongguo
Yulin ShenHua Energy Company, Yulin Shaanxi, 719000, China
This paper introducets he doublef luid positi on system at first. Then design modelineg xperiment to obtaint he mathematimcs odelos f doublefl uid positions ystem. Meanwhilde, esignt he controll ers and testify the feasibility and validity of the controlleras nd the network by simulationA. t last, programb y using Kingviewa nd siemenSs 7-200 PLC to run the doublfel uid positiocn ontrol system. The feasibilitya nd validity of the cascade control scheme has been proved. The results o f simulation and experiment are satisfying.
10.3969/j.issn.1001-8972.2012.12.106
白仲國(1969-),男(漢族),陜西省榆林市人,榆林神華能源有限責任公司,機電動力部,經理助理。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
汽車維護與修理(2015年2期)2015-02-28 12:15:41
