RTK技術在贊比亞某測區工程測量中的應用
2012-10-26 07:42:58中礦資源勘探股份有限公司錢再華
河南科技 2012年7期
中礦資源勘探股份有限公司 何 毅 錢再華 陶 濤 羅 健
RTK技術在贊比亞某測區工程測量中的應用
中礦資源勘探股份有限公司 何 毅 錢再華 陶 濤 羅 健
實時動態相對定位(RTK,Real Time Kinematie)技術,是以載波相位基本觀測量的差分定位技術。RTK測量的原理是將1臺GPS接收機和中繼發射電臺安置在基準站上進行觀測,根據基準站輸入的已知精確坐標、高程數據,計算出基準站到衛星的距離改正數,并由基準站實時地將這一改正數通過中繼電臺設定頻率發射出去,半徑10 km以內的接收機(中海達GNSS V8)在移動站進行GPS觀測的同時,通過相應頻率也收到基準站的改正數,并對其定位結果進行改正,從而實時地解算出移動站對中點的精確坐標、高程。
RTK技術的應用從根本上改變了兩點要通視照準的傳統測量方法,它的最大特點是,作業時不需要測站點與欲測點之間通視,速度快、精度高。它的作業精度:中海達GNSS V8平面為±(10 mm+1×10-6D),高程為±(20 mm+1×10-6D)。特別適用樹木蒿草叢生、地形平緩,且通視條件較差的地區,只要基站和移動站衛星高度截止角≥15°,有4顆接收衛星,移動站對中整平后5 s內即可測出該點RTK固定解X、Y、H數據。節省了為了觀測通視大量砍樹的勞力和作業時間。
本文,筆者闡述了在贊比亞某超大測區(500 km2)應用RTK技術進行地形測繪和地勘工程定位測量實例,希望能對在類似該地形地貌的地區測繪工作的技術專業人員有所幫助。
一、測區大地基準、參考橢球體、投影方式的選擇
測區位于東經28°,南緯14°,中央子午線27°。大地基準采用非洲1950弧基準ARC50,即非洲50基準。參考橢球體采用克拉克1880,即Clarke1880。投影方式為UTM(Universal Transverse Mercator)通用橫軸墨卡托。北向加常數10 000 000 m,東向加常數500 000 m,投影面高程1 200 m,平均緯度南14°,投影尺長系數m=0.999 6,半軸長6 378 249.145 m,扁率293.465。
二、測區各級控制網的建立
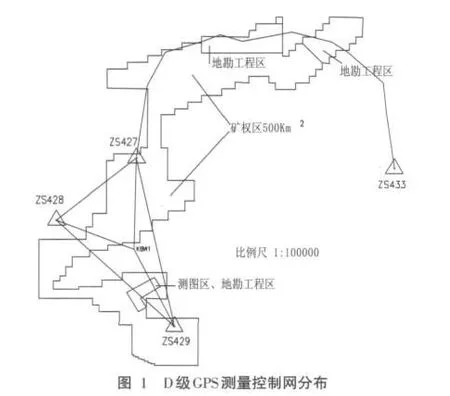
D級GPS首級控制網,18個點覆蓋500 km2,組成 GPS控制D級網附合導線,由ZS427、ZS428、ZS429,3個Ⅱ等點測量4參數+高程擬合進行轉換,計算出該地區橢球轉換參數,平面轉換參數,高程擬合參數,定名為KBW2011項目。再從已知點ZS427點連式聯測到已知點ZS433。11條邊全長60.000 km。D級GPS測量控制網分布如圖1所示。
測圖區E級GPS二級控制網,12個點覆蓋8.56 km2,組成GPS控制E級網,由K1、K2、K3三個D級GPS點測量,組成星形網。
三、地形圖測量
1.地形圖測量方法。利用測圖區內3個D級GPS控制點K1、K2、K3和E級GPS控制點12個,控制點設站和檢查點檢查,將測區劃分52條測圖剖面線網,線距(55~110)m×點距(40~60)m,均勻覆蓋全區,采用GPS RTK進行高精度線放樣模式進行地形地物碎部點測量。觀測開始前,繪制聯測草圖,制定觀測計劃,在作業過程中根據實際情況,及時作出調整。觀測時執行統一調度,按規定的時間進行觀測,GPS移動臺觀測時均嚴格對中整平,并在觀測開始和結束分別量一次儀器高,記錄于GPS測量記錄手簿上。觀測開始后,不使用對講機,必要時只在距接收機10 m之外使用。接收機開始記錄數據后,隨時注意衛星信號和信息存儲情況。當接收或存儲出現異常時,及時進行調整觀測計劃。礦區1∶5 000數字化地形圖編繪,按確定的邊界范圍成圖。1∶5 000數字化地形成圖基本等高距為1 m。所有地形點、地物點均用GPS RTK測量采集用CASS7.0軟件繪制地形圖。
2.地形、地物測量及測繪細則。
(1)1∶5 000地形圖上均展繪D、E級GPS控制點、鉆孔、剖控點等測量控制點,并按《圖式》規定符號進行表示。
(2)各類建筑物、構筑物及其主要附屬設施均進行了測繪,房屋以墻外角為準,臨時性建筑舍去。建筑物、構筑物輪廓凸凹在圖上小于1 mm時,用直線連接。獨立地物能按比例尺表示的實測外廓,填繪符號;不能按比例尺表示的,均準確表示了其定位點或定位線。
(3)地貌以等高線表示,明顯的特征地貌以符號表示。山頂、鞍部、山脊、凹地、谷底及傾斜變換處,均測注高程點。
(4)公路每100 m及地形起伏變換處測注高程點。
(5)水系及其附屬物按實際形狀測繪,河流測出河岸邊高程并標明了水流方向。
(6)植被的測繪按其經濟價值和面積大小適當進行取舍。地類界與線狀地物重合時,按線狀地物測繪。
(7)居民地、河流等的名稱,按現有的名稱進行注記。
四、工程點測量
1.鉆孔孔位測量。鉆孔孔位測量包括工程點施放和收測兩次進行。鉆孔工程放樣和收測均采用GPS RTK法。放樣作業方法:室內將鉆孔設計坐標編成數據文件輸入動態GPS,野外將動態GPS置于控制點上,調出放樣點坐標,儀器自動計算邊長、方位角,然后固定角度、跟蹤距離,直至準確放出孔位。動態GPS精度控制在厘米級,考慮打樁的誤差,工程點放樣偏差均小于3 cm。在工程完工后,采用動態GPS實測工程點坐標,鉆孔測量孔口中心坐標。所有工程點均標繪在地形圖上。
2.探槽淺井工程點測量。將動態GPS置于控制點上,采用GPS RTK法精確測定出探槽、淺井點點位,精度控制在厘米級。
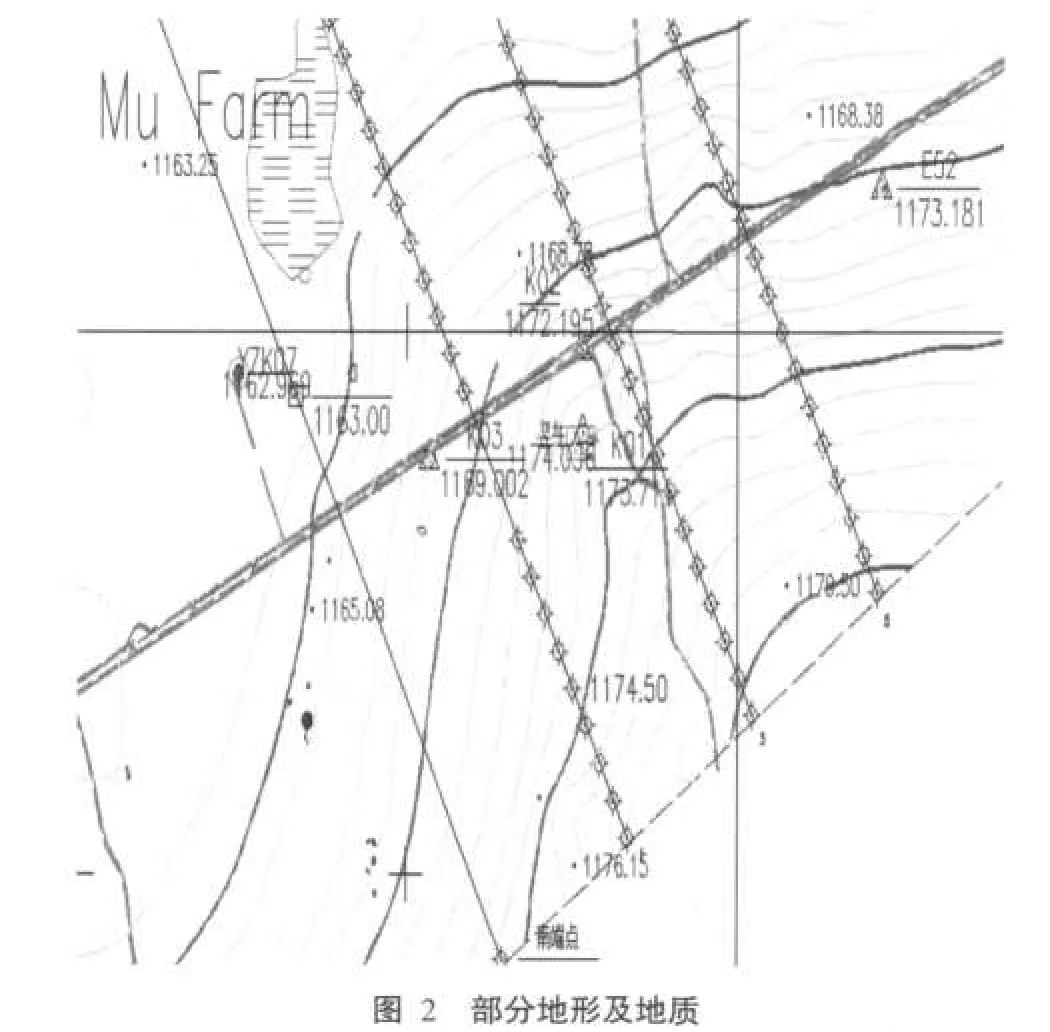
3.勘探線剖面測量。在D級GPS控制點K2上設置基站,K1點檢查,用GPS RTK方法對已設計剖面端點和基線0點進行點放樣,點位誤差附合精度要求后,再以基線0點為起點40 m點距向兩個端點方向分別放線,每個測量點位及端點均打木樁和釘子,用記號筆注記點號,就近系紅布為物探和地質提示點位。部分地形及地質如圖2所示。
五、RTK應用測量的注意事項
基站點設置視野開闊,選擇較高地形,移動站接收機,視場內高度截止角大于15°,附近沒有強烈干擾衛星信號接收的物體,無大功率無線電發射源,無高壓線設施。移動站作業時注意觀察手簿固定解情況,若出現單點或偽距時為錯誤解,應查找原因重新觀察,只有固定解才可點擊保存。樹冠密集遮蓋林區和井下工程測量要用全站儀配合。
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
太空探索(2016年6期)2016-07-10 12:09:06
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
筑路機械與施工機械化(2015年11期)2015-07-01 16:28:43
