快反系統中平面反射鏡的輕量化設計
2012-11-06 05:49:18徐新行劉長順
中國光學 2012年1期
徐新行,王 兵,喬 健,劉長順,時 魁
(中國科學院長春光學精密機械與物理研究所,吉林長春130033)
1 引言
快速控制反射鏡(簡稱“快反”)是光學系統中校正光束傳播方向和調整光路傾斜誤差的關鍵性器件,對于光學元件因熱變形等原因引起的光路偏移,可以起到一定的補償作用,因此,被廣泛應用于自適應光學、精密跟蹤、目標指向和光束控制等領域[1-3]。
由于快反系統的諧振頻率和響應速度要求較高,系統中反射鏡要盡可能的輕,因此,目前常見的快反鏡口徑都比較小(大多不超過Φ 200 mm),然而,隨著光學技術的迅速發展,快反系統的應用領域不斷被拓寬,對大口徑快反鏡的需求也越來越大。反射鏡作為快反系統的主要載荷,其口徑的增大,一方面會直接引起系統負載和慣量的增加,進而限制系統諧振頻率、控制帶寬以及響應速度的提高;而且,反射鏡作為快反系統中高速響應的光學部件,沒有復雜的柔性支撐結構,僅靠簡單的剛性固定方式,會對反射鏡的面形造成影響,所以要求反射鏡必須具有足夠的剛度[4-6]。另一方面,快反鏡口徑的增大,致使運動中反射鏡反射面因自重引起的變形量隨之增加,進而影響整個系統的通光質量和工作性能。因此,在保證反射鏡動、靜態剛度和強度的前提下對其進行最大程度的輕量化十分重要。
本文選擇比剛度大,熱變形系數小的碳化硅為鏡坯材料,采用背部開槽式結構減重,選擇背部3點式支撐,對多種輕量化方案進行了有限元分析。
2 快反系統的設計要求
在車載高精度跟瞄系統中,快反鏡主要用于精確控制發射光束的出射方向,最終實現對靜、動目標的實時跟蹤與瞄準,因此,對其靈敏性的要求較高。快反系統的主要性能指標包括:有效通光口徑、跟蹤范圍、穩定精度和響應頻率。表1列出了設計的快反系統所要滿足的主要性能指標。
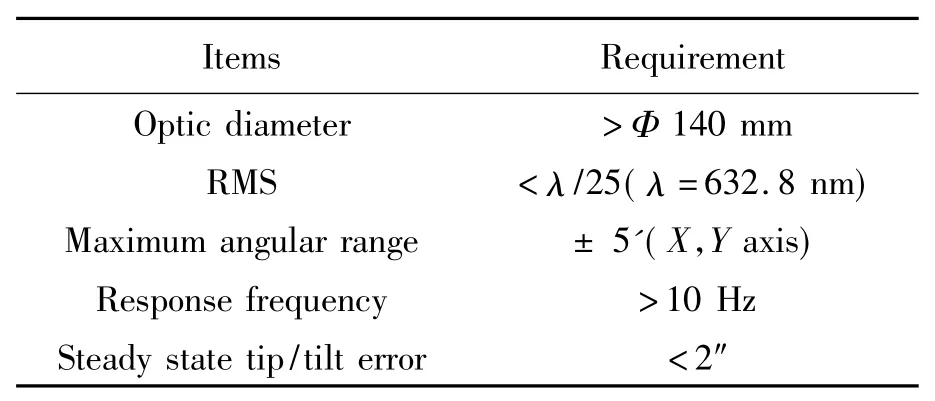
表1 FSM系統的主要性能指標Tab.1 Requisite performance conditions of fast-steering mirror system
3 反射鏡的輕量化與支撐方式
3.1 反射鏡的輕量化途徑
反射鏡的輕量化途徑主要有兩個:一是選用比剛度高、熱變形系數小的坯體材料;二是選擇合理的輕量化結構并確定最優的結構參數[7-10]。
在材料選擇方面,為了使反射鏡獲得足夠的光學面形精度,要求鏡坯材料具有:(a)優異的力學性能,即選用高彈性模量、低密度的材料,有利于對反射鏡進行有效的輕量化;(b)優異的熱物理性能,即選用低膨脹系數、導熱性能良好的材料,有利于實現反射鏡各部分的熱平衡,減小反射鏡的熱變形;(c)優良的光學加工性能,即鏡坯材料必須能適應光學面形的加工要求或者能經受光學鍍膜的工藝條件且可與反射膜結合;(d)優異的化學穩定性和安全性。
在輕量化結構選擇方面,反射鏡的減重方式主要有:(a)背面開孔或開槽式,如圖1(a)所示,這類結構可以通過機械加工或鑄造的方法實現,對反射鏡的支承方式幾乎沒有限制,多用于地面光學系統中,輕量化率約為30% ~55%;(b)拱形結構,如圖1(b)所示,可通過機械加工的方式實現,其輕量化率與背面開孔式差不多,但支承方式會受到結構形式的限制;(c)蜂窩式,如圖1(c)所示,此類減重結構可以通過澆鑄、高溫熔接、熔接物封接等方法實現,輕量化率高達70%,但制造工藝復雜,技術難度大,價格昂貴。

圖1 輕量化反射鏡的主要結構方式Fig.1 Major lightweight structures of mirror
根據以上分析,并結合表2所列幾種常用反射鏡材料的性能對比,本文選擇比剛度高、熱變形系數小的碳化硅作為鏡坯材料,采用背部開槽式結構減重,對反射鏡進行了輕量化設計。

表2 常用反射鏡材料的性能Tab.2 Performance of familiar mirror materials
3.2 反射鏡的支撐方式
反射鏡的支撐方式主要有中心支撐、側面支撐和背部支撐3種。其中,中心支撐多用于大口徑反射鏡的定位,單獨使用時鏡面變形較大,因此常與其它支撐方式配合使用;側面支撐是以反射鏡的側面為定位基準的一種支撐方式,它結構簡單,無裝配應力,但外形尺寸較大,不適于在體積較小的空間內使用;背部支撐是以反射鏡的背部為定位基準的一種支撐方式,也是反射鏡固定使用最多的結構形式[11-13]。
本文考慮到快反系統對運動部分質量的約束及空間體積的限制,選擇背部支撐方式對反射鏡進行固定。此外,由于反射鏡工作過程中處于高頻運動狀態,要求反射鏡的固定穩定、可靠,因此選擇背部三點支撐的剛性固定方式(背部支撐點組成的三角形為等腰銳角三角形),在此基礎上對反射鏡的輕量化結構進行設計、分析。

圖2 快反鏡輕量化結構及其支撐點位置示意圖Fig.2 Schematic diagram of structure of lightweight mirror of FSM system and its supporting point position
3.3 反射鏡的輕量化結構
圖2 給出了反射鏡輕量化結構及其支撐點位置的示意圖,所設計反射鏡的外形尺寸為:210 mm×145 mm×20 mm(長 ×寬 ×厚)。如圖所示,在反射鏡外形尺寸及其支撐方式一定的情況下,影響反射鏡面形精度與輕量化效果的結構參數主要有鏡面厚度和加強筋寬度。本文采用MSC.Patran有限元分析軟件,針對反射鏡的輕量化結構參數對反射鏡剛度和面形精度的影響進行了仿真計算,以便了解其影響規律,進而確定最優的結構參數,實現最佳的輕量化效果。
4 反射鏡的輕量化分析及實驗檢測
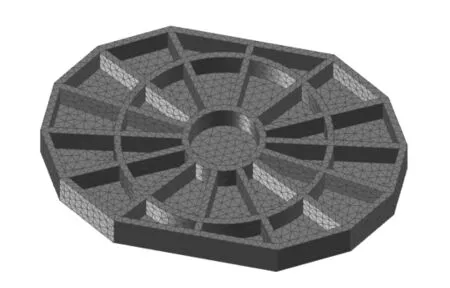
圖3 快反鏡的有限元分析模型Fig.3 Finite element model of lightweight mirror
首先采用UG設計軟件對反射鏡的輕量化結構進行三維實體建模,然后導入MSC.Patran分析環境中,并采用自由網格劃分方式對模型進行四面體有限元網格劃分。考慮到模型的復雜性及其對計算精度的要求,反射鏡模型共由34 987個節點,19 049個單元網格組成,如圖3所示。最后,根據反射鏡的實際使用情況,對鏡體的3種主要使用狀態(平放、立放—短軸豎直、斜放—短軸與水平面成45°)分別進行模擬仿真。其中,主要對模型施加重力場(g=9.8 m/s2)、剛性支撐(如圖2所示,反射鏡背面3支撐點固定約束,模型正面對應點處施加F=10 N的預緊力)等邊界條件進行分析計算。由于該模型為完全對稱式結構,因此,在實際計算時也可以只計算反射鏡的1/2模型,在對稱面進行對稱約束處理以符合實際情況。
4.1 輕量化結構對快反鏡剛度的影響
圖4為反射鏡在支撐預緊力和重力作用下3種不同狀態時的變形云圖。可以看出,反射鏡在水平狀態下反射面的變形最大。如圖4(a)所示,除支撐點區域外,鏡面的最大變形發生在鏡子長軸兩端,且偏向單點支撐一側,而短軸兩端鏡面的變形量相對較小。因此,在設計此類長條形反射鏡時,可以考慮長軸兩端區域和背部加強筋相對密集一些,以提高鏡體的整體剛度。而短軸兩端區域和背部加筋相對分散一些,以利于鏡體輕量化率的提高。圖5為反射鏡在重力作用下的應力分布云圖。反射鏡的應力集中主要分布在反射鏡背部的加強筋上,因此為了保證反射鏡在振動、沖擊等惡劣的工作環境下仍具有穩定可靠的面形精度,反射鏡的筋寬不宜過小。
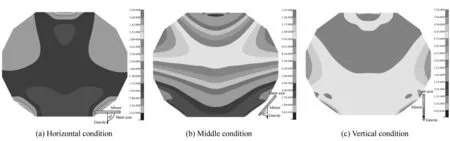
圖4 剛性支撐預緊力及重力作用下快反鏡反射面的變形分布云圖Fig.4 Distribution maps of deformation of reflecting surface under gravity and rigid supporting forces

圖5 重力作用下快反鏡應力分布云圖Fig.5 Stress distribution graph of mirror under gravity
4.2 筋寬對快反鏡剛度的影響
在反射鏡厚度為20 mm、鏡面厚度為4 mm不變的情況下,分別取加強筋寬度為2、4、6、8 mm建立鏡體的輕量化結構模型,相應的有限元分析結果如表3所示。從表3可以看出,反射鏡的最大應力及反射面的最大變形量隨著加強筋寬度的增大而減小,即反射鏡的剛度隨著筋寬的增大逐漸改善。但當筋寬增大到一定程度時,鏡體剛度的改善程度減緩;反射鏡的輕量化率則隨著筋寬的增大而減小。結合反射鏡面形的設計要求(RMS值<λ/25=25.3 nm)和當前的機械加工工藝,本設計選擇反射鏡的筋寬為4 mm。

表3 不同筋寬快反鏡的各項性能參數Tab.3 Performance parameters of mirrors with different rid widths

表4 不同鏡面厚度快反鏡的各項性能參數Tab.4 Performance parameters of mirrors with different mirror thicknesses
4.3 鏡面厚度對快反鏡剛度的影響
在反射鏡厚度為20 mm、加強筋寬為4 mm不變的情況下,分別取鏡面厚度為2、4、6、8 mm建立鏡體的輕量化結構模型,有限元分析結果如表4所示。
從表4可以看出,反射鏡的最大應力及反射面的最大變形量隨著鏡面厚度的增大而增大,同時,反射鏡的輕量化率隨著鏡面厚度的增大而減小。因此,在機械加工工藝允許的條件下,應盡量選擇較小的鏡面厚度。這里結合反射鏡面形的設計要求(RMS值<λ/25),選擇鏡面厚度為4 mm。
4.4 實驗檢測
對有限元優化設計出的反射鏡進行了實際加工制備,毛坯鍍金后的實物照片如圖6所示,并用Zygo干涉儀對裝配后反射鏡中心有效口徑部分進行了面形精度檢測。檢測結果如圖7所示,反射鏡反射面的 RMS值不超過 λ/30(λ=632.8 nm),與分析結果相符,滿足系統的設計要求。由此可知,采用有限元法對反射鏡進行結構輕量化設計,可靠實用,尤其對價格昂貴的鏡坯材料更具優勢。
圖6 快反鏡的實物照片Fig.6 Photograph of SiC mirror
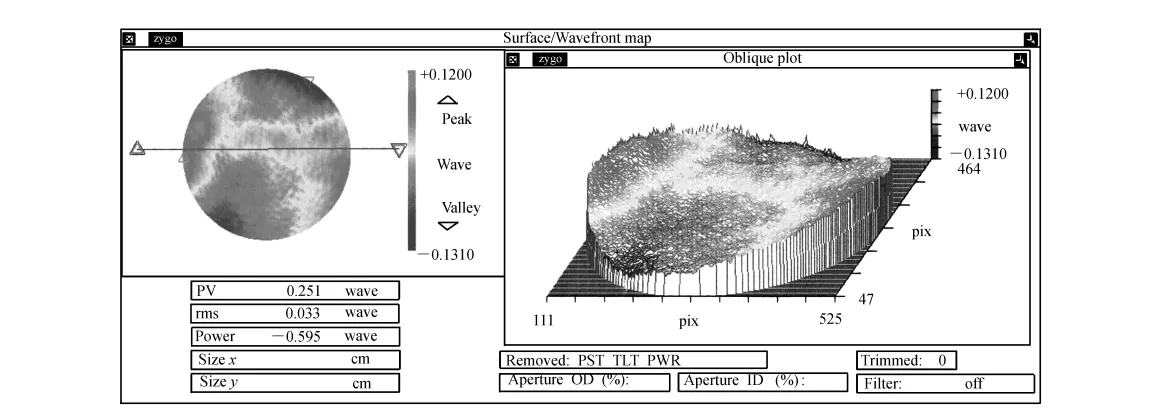
圖7 快反鏡的面形精度檢測結果Fig.7 Measurement result of reflecting surface
5 結論
從快反系統中平面反射鏡的設計要求出發,采用有限元分析的方法對快反鏡的輕量化結構進行了優化設計。分析結果表明:在反射鏡外形尺寸一定的情況下,筋寬越大,鏡體剛度越好,當筋寬增大到一定程度時,反射鏡剛度的改善程度減緩;鏡面越厚,鏡體的內應力、自重變形越大。因此,本設計在現有機械加工工藝條件下,結合反射鏡的要求,確定并制備了筋寬為4 mm,鏡面厚度為4 mm的碳化硅反射鏡,鏡體輕量化率達55%。最終,實測反射鏡的面形精度,其RMS值不超過λ/30,與分析結果相符,滿足系統的使用要求。
[1]魯亞飛,范大鵬,范世珣,等.快速反射鏡兩軸柔性支承設計[J].光學 精密工程,2010,18(12):2575-2581.LU Y F,FAN D P,FAN SH X,et al..Design of two-axis elastic support for fast steering mirror[J].Opt.Precision Eng.,2010,18(12):2575-2581.(in Chinese)
[2]MORGAN F E,WASSONA S R,LONDON J J,et al..Large,high performance,fast steering mirrors with FPGA-embedded controls[J].SPIE,2009,7466:74660H-1.
[3]徐新行,王兵,韓旭東,等.音圈電機驅動的球面副支撐式快速控制反射鏡設計[J].光學 精密工程,2011,19(6):1320-1325.XU X H,WANG B,HAN X D,et al..Design of fast-steering mirror with spherical pair supporting structure driven by voice coil actuators[J].Opt.Precision Eng.,2011,19(6):1320-1325.(in Chinese)
[4]國紹文,王武義,張廣玉,等.空間光學系統反射鏡輕量化技術綜述[J].光學儀器,2005,27(4):78-82.GUO SH W,WANG W Y,ZHANG G Y,et al..Lightweight mirror technology for space optical systems[J].Opt.Instruments,2005,27(4):78-82.(in Chinese)
[5]周超,楊洪波,吳小霞,等.地基大口徑望遠鏡結構的性能分析[J].光學 精密工程,2011,19(1):138-144.ZHOU CH,YANG H B,WU X X,et al..Structural analysis of ground-based large telescopes[J].Opt.Precision Eng.,2011,19(1):138-144.(in Chinese)
[6]閆勇,金光,楊洪波.空間反射鏡結構輕量化設計[J].紅外與激光工程,2008,37(1):97-101.YAN Y,JIN G,YANG H B.Lightweight structural design of space mirror[J].Infrared and Laser Eng.,2008,37(1):97-101.(in Chinese)
[7]陳夫林,張景旭,吳小霞,等.620 mm薄鏡面的主動支撐結構及面形校正[J].光學 精密工程,2011,19(5):1022-1029.CHEN F L,ZHANG J X,WU X X,et al..Supporting structure of 620 mm thin primary mirror and its active surface correction[J].Opt.Precision Eng.,2011,19(5):1022-1029.(in Chinese)
[8]劉輝,于清華,裴云天.大口徑反射鏡輕量化結構比較及面形分析[J].光電工程,2009,36(11):70-74.LIU H,YU Q H,PEI Y T.Light-weighted structure contrast and deformation analysis of the large mirror[J].Opto-Electronic Eng.,2009,36(11):70-74.(in Chinese)
[9]劉秀敏,何斌,沙巍,等.空間相機主反射鏡的拓撲優化設計[J].中國光學與應用光學,2010,3(3):239-244.LIU X M,HE B,SHA W,et al..Topological lightweight design of primary mirror in space camera[J].Chinese J.Optics and Appl.Optics,2010,3(3):239-244.(in Chinese)
[10]YODER Jr P R.Opto-Mechanical Systems Design[M].3rd ed.Bellingham:SPIE Press,2006.
[11]王忠素,翟巖,梅貴,等.空間光學遙感器反射鏡柔性支撐的設計[J].光學 精密工程,2010,18(8):1833-1841.WANG ZH S,ZHAI Y,MEI G,et al..Design of flexible support structure of reflector in space remote sensor[J].Opt.Precision Eng.,2010,18(8):1833-1841.(in Chinese)
[12]曾勇強,傅丹鷹,孫紀文,等.空間遙感器大口徑反射鏡支撐結構型式綜述[J].航天返回與遙感,2006,27(2):18-23.ZENG Y Q,FU D Y,SUN J W,et al..Summary of support structure patterns of large mirror for space remote sensor[J].Spacecraft Recovery&Remote Sensing,2006,27(2):18-23.(in Chinese)
[13]李志來,徐宏.長條形空間反射鏡及其支撐結構設計[J].光學 精密工程,2011,19(5):1039-1047.LI ZH L,XU H.Design of rectangular space mirror and its support structure[J].Opt.Precision Eng.,2011,19(5):1039-1047.(in Chinese)
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2020年1期)2020-09-21 09:24:52
中華詩詞(2019年7期)2019-11-25 01:43:04
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24