駝峰車輛溜放速度與阻力關系分析系統的設計與實現
2012-11-27 06:23:58邢群雁徐萬安
鐵道通信信號 2012年3期
邢群雁 徐萬安 王 琳
中國鐵道科學研究院通信信號研究所 100081 北京
隨著鐵路運量的加大和科學技術的發展,駝峰自動化控制系統得到了廣泛地應用,編組場的作業效率得到了較大的提高。但駝峰自動化控制系統一旦投入運營,控制參數調整主要依賴于既有的經驗,沒有嚴格的理論分析和公式推導。出口速度的控制是溜放自動化系統的執行環節,它的控制精度與控制時機是否合宜直接關系到拉間隔與連掛的效果,建立一套基于自動化駝峰控制系統的車輛溜放速度與阻力關系分析系統是十分必要的。
在溜放過程中影響車輛溜放速度的因素很多,用一個機器部分或者全部取代人工操作決策的過程,其難度是不言而喻的。在構建實際系統時,可以采用2種方案:一種是為不同的功能模塊建立不同的知識庫和規則庫;另一種是所有功能模塊都采用同一知識庫和規則庫,依據不同的觸發對象選取不同規則和知識處理。前者的優點是便于設計、維護和知識庫的更新,各功能模塊間的耦合最低,但不同模塊間需進行大量的數據通信,對數據間的同步更新和訪問機制控制要求較高;后者的優缺點與前者相反,考慮到編組站駝峰場的實際情況,采用前一種方法構建。利用自動化駝峰控制系統數據庫記錄溜放作業過程中速度和阻力的相關數據,包括車輛溜放過程出口速度、入口速度、車重和車型等信息,用速度和阻力關系分析軟件分析數據庫中的相關記錄,生成阻力和速度關系曲線。專家系統根據阻力與速度關系曲線和專家知識庫,推導出阻力和速度關系的規律和公式,計算控制系統的調整參數,并為駝峰自動化控制系統參數調整提供理論支持,從而進一步提高整個系統的可靠性和駝峰的解編能力。
1 實現原理
采用基于專家系統的輔助決策系統,建立車輛溜放過程控制中速度與阻力關系的算法,其基本原理是建立基于權重因子的模糊控制知識庫、基于專家經驗判別準則的規則庫,以及基于事件現象發生概率的自學習知識庫,采用專家系統的構建方法和推理原則實現車輛溜放過程中速度與阻力關系的確定。
在編組站駝峰場中,車輛溜放過程中運行阻力主要由基本阻力、曲線阻力、道岔阻力、空氣阻力和調速工具產生的阻力等5種成份組成。
根據四個部位設有4個論域,設在nx部位車輛溜放過程中阻力與速度的關系抽象表示為
nx=fx(ω,ν)
式中,x∈(1,2,3,4),ω為相應部位的阻力,ν為相應部位的速度。
充分挖掘關系數據庫中有特征關聯的數據,s是樣本數據的個數,對于m維空間Rm中的一組向量Ai(i=1,2,…,s),計算每一個向量的隸屬度,與初始聚類中心反復迭代,再根據實際概率分布情況做決策,訓練人工智能機器。以數據庫數據的一組向量Ai(i=1,2,…,s)為輸入量,建立二維帶權重因子的模糊控制規則的量化描述:

2 系統結構
2.1 硬件結構
駝峰自動化控制系統鉤車溜放速度與阻力關系分析系統由數據庫服務子系統、遠程數據采集子系統、數據分析子系統和專家分析子系統組成。系統硬件框圖如圖1所示。
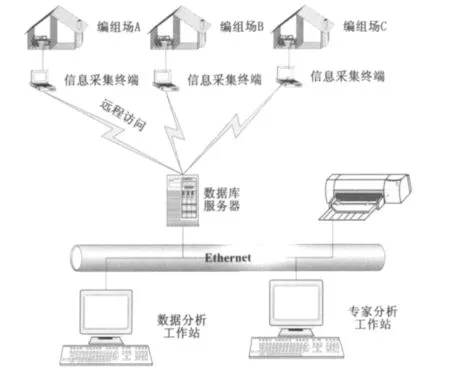
圖1 分析系統硬件框圖
1.局域網。內部交換局域網用一臺以太網交換機作為其核心主干數據通信設備,所有的系統設備通過它來完成各子系統之間的底層數據通信,通信協議采用TCP/IP。
2.數據庫服務器。運行My SQL數據庫的數據庫服務器,為系統提供統一的數據存儲接口和公共數據的存儲介質,為系統各個部分的數據分析提供數據基礎。
3.數據分析工作站。通過對記錄在數據庫服務器中的作業數據的分析,歸納編組場作業記錄中的速度阻力關系,生成分析報告和圖形曲線,進行顯示和打印輸出。
4.專家分析工作站。通過數據分析工作站生成的報告和曲線,結合專家的經驗分析,進行公式推導,結合駝峰控制系統提出參數調整建議,生成相關報表。
5.信息采集終端。專家分析工作站與駝峰自動化控制系統通過數字接口進行通信,采集作業信息并且通過遠程訪問將數據傳遞到數據服務器。
2.2 軟件結構
系統軟件包括商用軟件和使用C或C++語言編寫的集成了不同功能的操作軟件。通過以下3個方面描述駝峰自動化控制系統鉤車溜放速度與阻力關系分析系統結構。
1.系統軟件結構層次圖及相關的描述。
2.硬件結構及組成硬件設備和外部接口的描述。
3.軟件組成和描述,以及軟件在物理硬件設備中的分布情況描述。
圖2給出了一個圖形化的駝峰自動化控制系統鉤車溜放速度與阻力關系分析系統軟件環境模型,此模型適應于所有為本系統所開發的軟件,使用此模型能夠為系統所有的應用提供一個兼容的、可移植的編程接口。
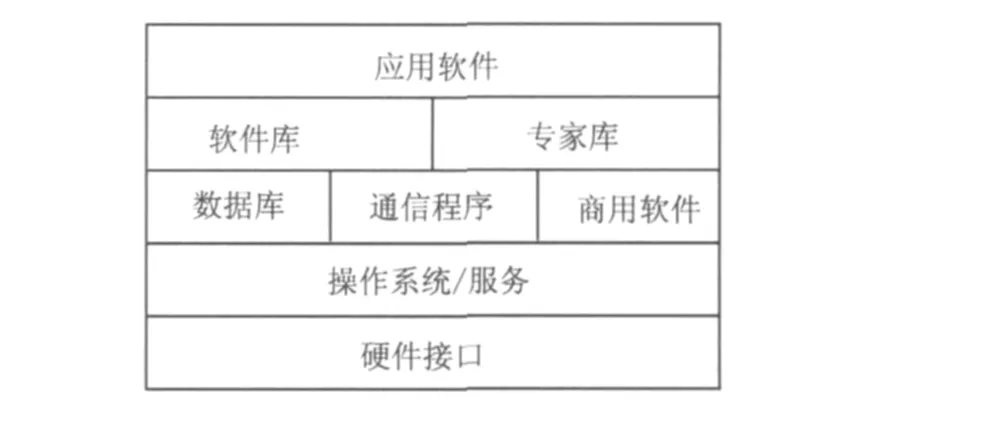
圖2 分析系統軟件環境模型
駝峰自動化控制系統鉤車溜放速度與阻力關系分析系統軟件是由商用軟件和所開發的應用軟件組成的。
圖2列出了系統各主要硬件上所要運行的軟件任務,并給出這些軟件任務的描述以及其關系。系統軟件具有分布式處理結構,各子系統運行在不同的處理器上完成開發的操作和任務,My SQL數據庫提供網絡間實時數據的存儲和訪問。這里所描述的軟件運行是根據系統的需要分配在特定的處理器中進行的,而不必同時運行或運行在同一個處理器中,特定的軟件將根據其功能特性分配給特定的工作站處理器。
3 軟件設計
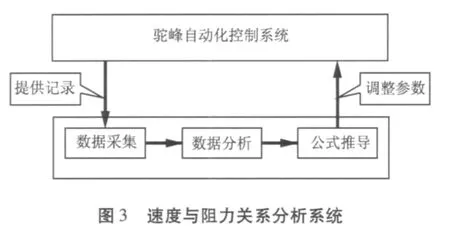
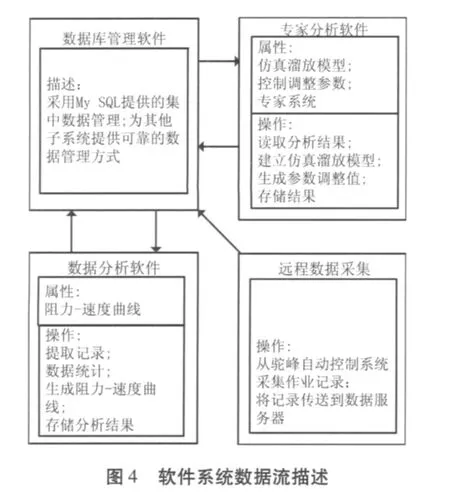
遠程數據采集子系統不斷地采集并存儲駝峰自動化控制系統的編組場作業記錄;數據分析子系統通過對大量作業數據的分析,生成鉤車溜放速度與阻力關系曲線;專家分析子系統在數據分析子系統計算結果的基礎上,建立溜放模型并推導出鉤車溜放速度與阻力關系的統計公式,最終提出駝峰自動化控制系統的調整參數。速度與阻力關系分析系統見圖3。軟件系統數據流描述見圖4所示。各子系統描述如表1、表2、表3所示。
4 結束語
車輛溜放速度與阻力關系分析系統是在綜合考慮了當代計算機技術、自動化技術和人工智能等先進學科的成熟、可靠的技術措施,以及目前國內各種駝峰自動控制系統的優缺點,并在實際系統模式的基礎上開發的專門用于駝峰自動控制系統的分析系統。隨著分析系統大量使用,必將使駝峰自動控制系統的可靠性、安全性和功能等方面日趨完善,大大降低電務人員的勞動強度,推動駝峰現代化的發展。
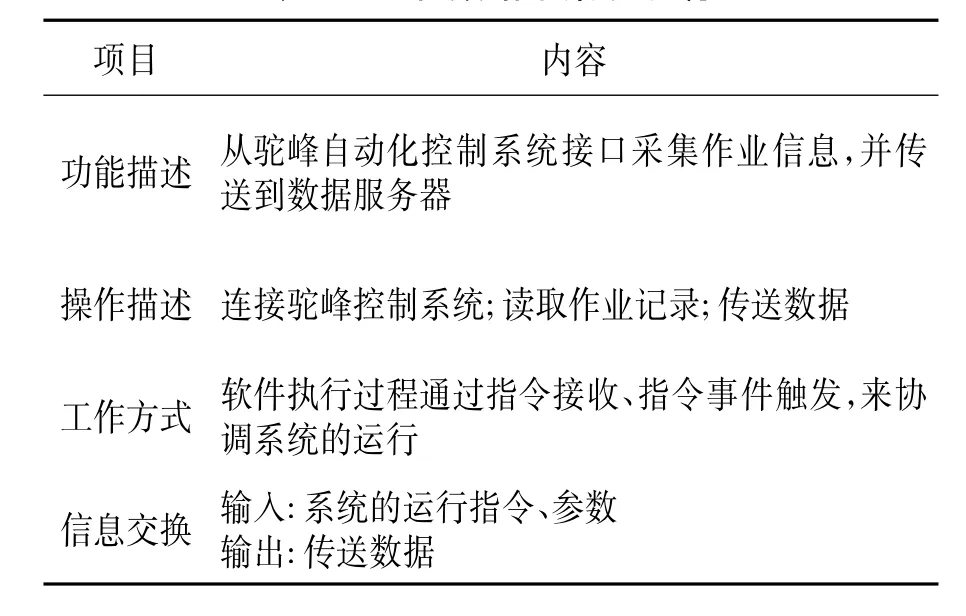
表1 遠程數據采集子系統
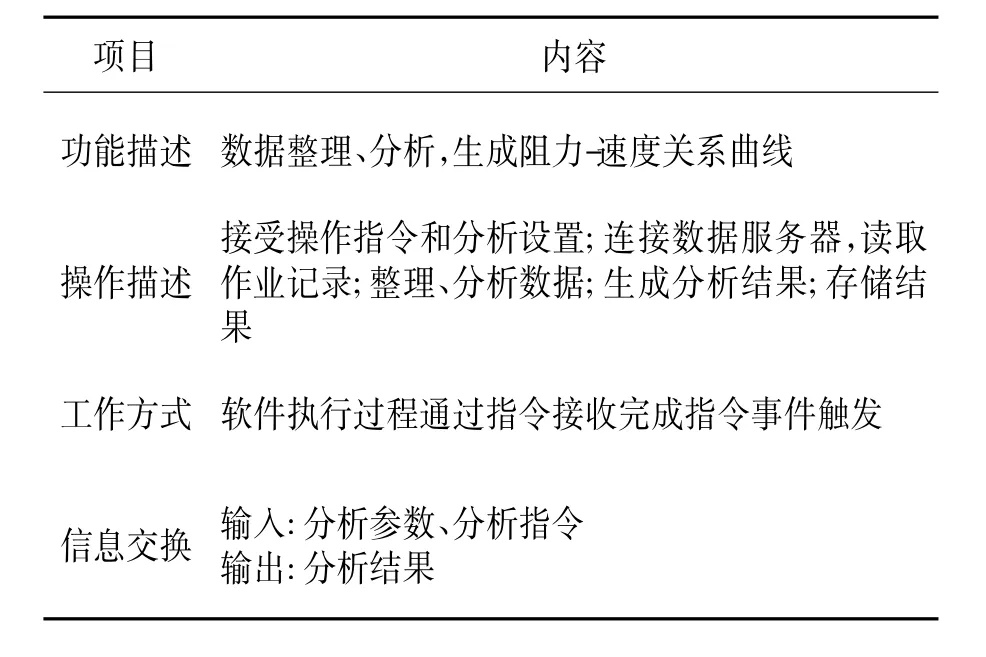
表2 數據分析子系統
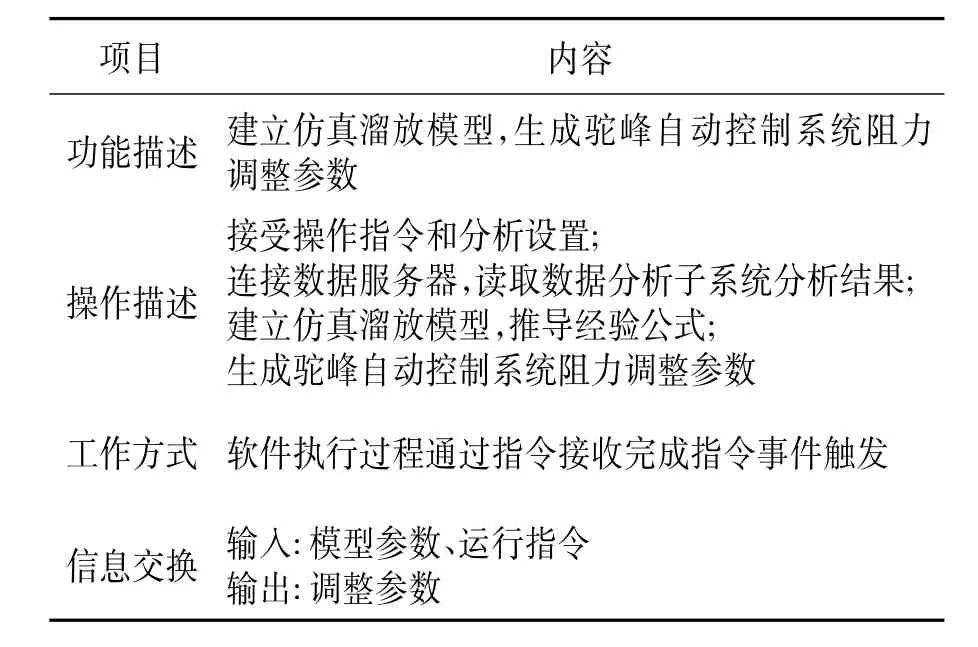
表3 專家分析子系統
[1]湯百華.編組站駝峰在鐵路運輸中的地位和作用[C].//中國鐵道學會.駝峰自動化論文集.北京:中國鐵道出版社,1993.
[2]傅京孫.人工智能及其應用[M].北京:清華大學出版社,1995.
[3]曹文軍.知識庫系統原理及其應用面[M].上海:復旦大學出版社,1995.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2018年18期)2018-11-14 01:48:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
財經(2017年2期)2017-03-10 14:35:35
山東工業技術(2016年15期)2016-12-01 05:31:22
財經(2016年15期)2016-06-03 07:38:02
財經(2016年3期)2016-03-07 07:44:46
