往復潛油電泵控制系統研究
2012-12-05 02:41:46朱拾東張建軍師俊峰趙瑞東
石油礦場機械 2012年5期
朱拾東,張建軍,師俊峰,劉 猛,趙瑞東,舒 勇
(中國石油 勘探開發研究院,北京 100083)①
直線電機抽油泵直接利用直線電機的直線往復運動帶動抽油桿上下運動,舉升井下原油,其結構簡單,質量輕,系統效率高,節能效果顯著[1-4]。由于直線感應電機直接驅動柱塞泵工作,電機長期運行于井下狹小空間,直線電機尺寸及排量受到限制,沖程長,沖次低,需要對抽油泵進行調參,在直線電機運動的兩極點需要快速響應。為了實現抽油機的快速調參和快速換向,有必要對直線電機控制系統進行研究。
1 電機結構
直線潛油電泵舉升技術主要包括直線潛油電機、井下泵和地面控制系統3部分。
直線潛油電機由普通平式油管下到設計泵深,地面電源通過智能控制柜將交流電變頻后用潛油電纜輸送到井下直線電機。當電流進入定子繞組,產生的磁場通過變頻方式實現磁極的交變,與永磁動子上固定磁場的相互作用實現永磁動子的運動,從而使懸浮的永磁動子帶動柱塞限位往復運動。
井下采油泵主要由直線電機、保護器和泵本體3部分組成,其裝配關系如圖1所示[5]。柱塞通過柱塞接頭與直線電機動子相連,直線電機動子和定子為圓筒形。2個小端蓋安裝在保護器外管的兩端,套管內裝有預緊彈簧、內錐和外錐,并安裝在拉桿上;儲液腔內裝有預緊彈簧;在保護器外管的內部及套管的一端裝有填料、雙向動壓軸承、墊片、隔環等;填料、雙向動壓軸承、墊片、隔環安裝在拉桿上;油管接頭連接在隔膜泵體上,隔膜泵體上裝有單向進油閥和單向出油閥,金屬薄膜擠壓在隔膜泵體、波紋管和腔體之間,波紋管固定在腔體上,波紋管、柱塞之間和儲油腔內封裝潤滑油,儲液腔內裝有氟油;根據不同作業要求,可以將砂帽與分離器安裝在油管接頭和隔膜泵體之間;隔膜泵體也可以裝配多個單向進油閥和單向出油閥。采用多個圓筒直線電機串聯時,需增加扶正器,以提高柱塞的推力,并保證電機定子位置固定[6-7]。

圖1 新型直線電機采油泵結構
受井下空間限制,兼顧工作效率與出力要求,直線電機抽油泵的結構一般采用圓筒形動鐵式或動磁式中空結構[8]。圖2為直線抽油泵用圓筒形直線電機的結構,定子繞組為餅式環形繞組,同時設有霍爾傳感器,動子上設有齒和齒槽。

圖2 圓筒形直線電機結構
2 直線電機數學模型
為了便于分析,不考慮邊端效應;忽略鐵芯飽和及溫度對電機參數的影響;不計渦流損耗和磁滯損耗;不考慮溫度等因素對永磁材料的影響。根據文獻可推導出直線電機d-q坐標下的電壓和磁鏈方程[9],其方程如下。
電壓方程為

磁鏈方程為

式中,ψd、ψq為d、q軸磁鏈,Ld、Lq為d、q軸電感;ψf為永磁體等效磁鏈;R為每項繞組電阻;ω為永磁同步直線電機平移速度折算成的旋轉電機角速度,ω=(π/τ)v,v為平移速度;τ為磁極中心距。
由式(1)可推導出其推力方程為
電機的機械運動方程為

式中,Fe為電磁推力;FL為負載阻力;Bv為粘性摩擦因數;m為運動部分質量,m=mr+mL;mr為動子質量;mL為動子帶動的負載質量。
由式(1)~(4)構成了往復抽油泵直線電機d-q坐標系下的電機模型。
3 模糊控制器的設計
經典PID控制器離散的控制算法為

式中,u(k)為控制器的輸出信號;e(k)為控制器的輸入信號;Kp、Ki、Kd為控制器的比例系數、積分系數和微分系數。
對于傳統的PID控制,由于Kp、Ki、Kd的數值固定,即使將這3個參數調節得很好,但還是很難滿足現場的需要。
本文結合模糊控制和傳統PID控制,采用模糊推力思想,根據不同的誤差e和誤差率ec對PID的3個參數進行在線調整。該控制由模糊推力部分和常規PID部分2部分組成,其結構如圖3所示。

圖3 模糊PID系統結構
根據直線電機的數學模型建立的速度PID控制機構如圖4所示[9]。

圖4 往復潛油電泵直線電機速度PID控制結構
對于本系統的模糊控制器,選取速度偏差e和ec為輸入語言變量,其語言值的模糊子集為{負大,負中,負小,零,正小,正中,正大},并記為{NB,NM,NS,ZE,PS,PM,PB},同樣,對Kp、Ki、Kd進行模糊[10-11]。Kp模糊控制規則如表1所示,其他Ki、Kd省略。
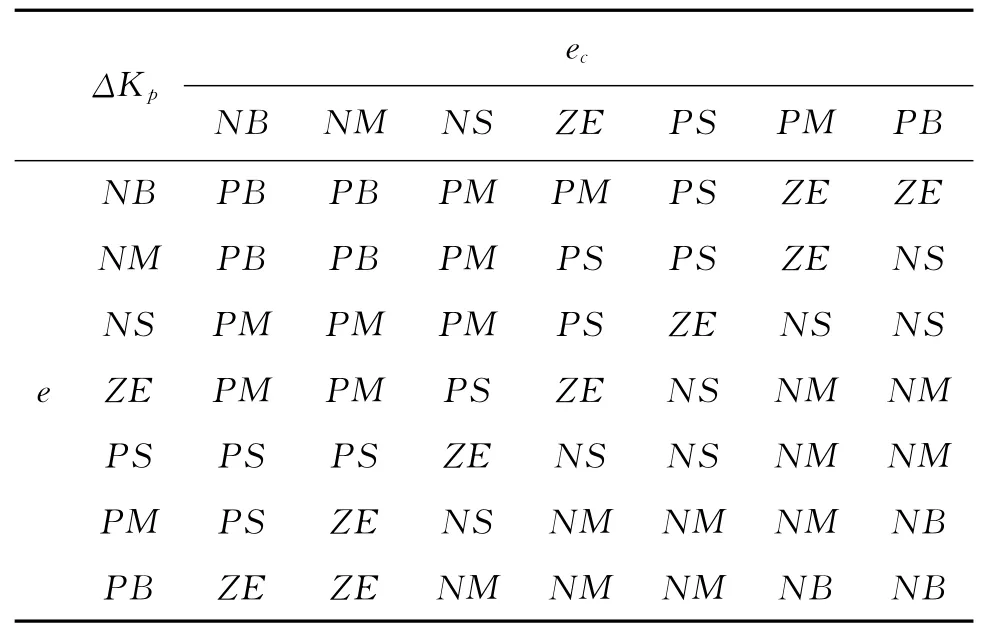
表1 Kp的模糊規則
4 仿真分析
采用Matlab中的FIS編輯器與Simulink相結合的方法進行仿真。仿真參數為:永磁體等效磁鏈ψf=0.1Wb,動子電樞電阻Rs=1.8Ω,動子d-q軸電感Ld=Lq=18.2mH,動子質量m=30kg,粘性摩擦因數Bv=0.2N·s/m,極距τ=18mm,電流放大倍數Ki=600,其效果圖如圖5~7所示。
由圖5可明顯看出,模糊PID控制的超調量與調整時間明顯低于PID控制;由圖6~7可以看出,在不同負載下PID控制有明顯的影響,而模糊PID其抗干擾性比較強。
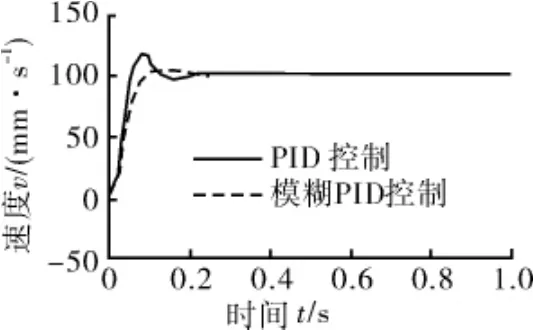
圖5 PID與模糊PID控制比較

圖6 模糊PID負載2kN與20kN時的比較

圖7 PID控制負載為2kN與20kN時的比較
5 結論
1)通過對模糊控制與傳統PID控制進行對比,發現模糊控制比傳統PID性能好,超調量小,震蕩較小,控制效果更好。
2)對往復潛油電泵控制系統的改進有很大的指導作用,為以后的研究奠定了基礎。
[1]邱家友,周曉紅,劉煥梅.安塞油田直線電機無桿采油工藝試驗效果分析[J].石油礦場機械,2010,39(7):64-68.
[2]曲 海,魏秦文,梁 政,等.直線電機抽油泵泵閥不同工況特點研究[J].石油礦場機械,2010,39(3):12-17.
[3]楊鐵寧,張金中.直線電機驅動往復泵流量壓力變化規律試驗研究[J].石油礦場機械,2009,38(4):56-61.
[4]陳曉麗,楊胡坤,蘇 穎,等.直線電機抽油機運行參數優化設計[J].石油礦場機械,2009,38(9):46-49.
[5]魏秦文,劉 健,侯勇俊,等.直線電機在采油設備中的應用[J].石油礦場機械,2007,36(8):54-57.
[6]郭公喜,葉志強,李為民,等.直線電機驅動抽油機的試驗研究[J].石油礦場機械,2005,34(4):17-20.
[7]魏秦文,張留昌.新型直線電機采油泵及其關鍵技術[J].石油礦場機械,2007,36(5):5-9.
[8]魏秦文,張 茂.直線電機采油泵存在的問題及改進措施[J].石油礦場機械,2007,36(6):6-13.
[9]郭慶鼎,萬成元.直線交流伺服系統的精密控制技術[M].北京:機械工業出版社,2000.
[10]Yang Xia,Zhao Yan,Zhu Xiao,et al.Design and simulation of fuzzy PID controller for the movable beam in gantry machining center[C]//Proceedings of the IEEE International Conference on Automation and Logistics,2009:742-746.
[11]葉云岳,陸凱元.直線電機的PID控制與模糊控制[J].電工技術學報,2001,16(3):12-15.