同步軌道共位衛星位置確定技術
2012-12-17 10:42:02陳文全
電子科技 2012年7期
關鍵詞:測量
胡 娟,陳文全
(1.鄭州航空工業管理學院電子通信工程系,河南鄭州 450047;2.中國電子科技集團公司第27研究所測控部,河南鄭州 450015)
地球同步軌道衛星具有相對地球為“靜止”的特點,可以有效地利用其為通訊、數據傳輸、電視廣播、氣象、海洋探測、導航和軍事等行業和科學研究服務,并已發揮顯著的應用價值和經濟價值。截至2005年,地球同步軌道附近約60 km寬的區域內共有衛星1 120個[1]。隨著各國對同步軌道衛星需求的增加,同步軌道位置日趨緊張,提高地球同步軌道弧段利用率越來越受重視。
同步軌道多星共位可以解決同步軌道衛星需求的增長,可以提高地球同步軌道弧段利用率。所謂“多星共位”,就是在東西、南北方向均為±0.1°窗口放置兩顆或兩顆以上同步衛星[2]。20世紀80年代末到90年代初,ESA的Olympus通信衛星和德國一顆、法國兩顆衛星共位運行[3]。1992年德國科學家提出了在同一軌道窗口內放置7顆同步衛星的方案設想。為避免衛星飄出共位窗口,需要對窗口內的衛星確定絕對位置;為提高同一個窗口的衛星數量,避免衛星間發生碰撞,需要精密測量衛星間的相對位置。
1 共位衛星位置確定原理
目前,國內同步軌道衛星絕對位置高精度確定主要采用相距幾千公里的多個測量站,通過雙邊距離轉發測量目標到各測量站的距離進行定位。星群、星座等衛星間的相對位置主要采用星間微波、激光測量方式。雙邊距離轉發測量同步衛星的絕對位置,各測量站距離太遠,不利于滿足共視條件和安排觀測任務。星間微波、激光測量方式需要星上裝載測量設備,已經在軌的衛星不能實現。下面介紹一差分連接端站干涉技術(CEI),可以同時實現同步軌道共位衛星絕對位置和相對位置測量。
CEI屬于角度測量系統,可用于航天器的導航測量。兩個地面站被動接收同一個無線電信號源,參照共同的參考頻率得兩站所收信號的相位差,由此導出信號源到兩站的距離差(DOR),結合兩站的高精度基線長度,從而獲得導航所需的信號源至基線的方向角θ,利用兩條非平行的基線可以測得飛行器的兩個方向角的測量值[8],如圖1所示。對于共位衛星的測量可以增加一個測距信息,如采用一主兩副的CEI系統,主站發出上行信號,通過共位衛星轉發后,主站和兩個副站同時接收轉發下來的信號。一方面主站通過收發信號的時延,得到主站到共位衛星的距離R;另一方面,通過比較主副站接收信號的相位延遲,得到共位衛星到主副站的距離差r,從而形成Rr1r2測量體制。該測量體制要求站間基線不能過長,站間要求有同一時鐘參考頻率,或要求較高的時鐘同步精度。
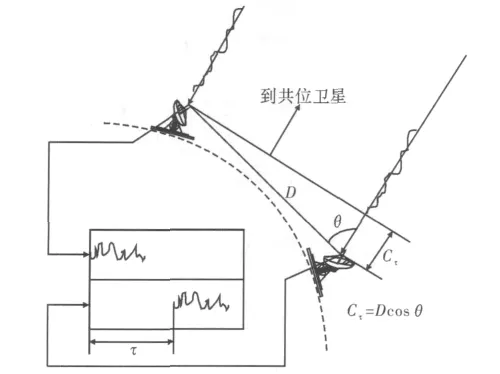
圖1 CEI測量原理示意圖
采用CEI對同步衛星的絕對位置測量由于存在基線、對流層、電離層、時鐘等誤差,測量精度較低。可以采用差分CEI測量技術,抵消各種測量誤差,提高測量精度。差分CEI工作原理如圖2所示,測量差分單向差分距離ΔDOR和差分單向多普勒ΔDOD。
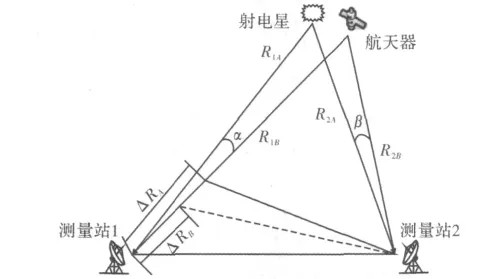
圖2 差分CEI觀測原理示意圖
設C為光速;R1A和R2A為射電星到測控站1和測控站2的單向距離;R1B和R2B為航天器到測控站1和測控站2的單向距離;τc1、τc2為測控站1和測控站2的時鐘誤差;τS1A、τS2A、τS1B、τS2B為射電星和衛星 B 至測控站1和測控站2由大氣、等離子等介質差引入的傳輸時延誤差;τd1A、τd1B、τd2A、τd2B為測控站 1、測控站 2 接收航天器A、B的接收設備時延。
射電星至測控站1和測控站2的距離測量值ρ1A、ρ2A分別為

航天器至測控站1和測控站2的距離測量值ρ1B、ρ2B分別為

目標A到兩測量站的距離差DORA為

同理,
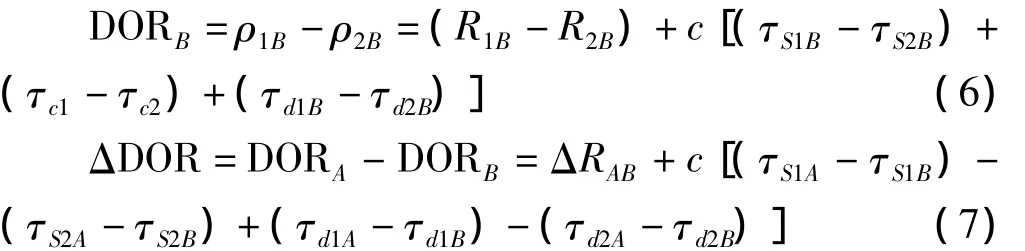
其中,ΔRAB=(R1A-R2A)-(R1B-R2B)為兩個目標到兩個測控站的差分距離差真值。如圖,航天器和射電星形成的夾角 α、β 小于 10°時,存在 τS1A≈τS1B,τS2A≈τS2B。這樣,大部分誤差通過差分抵消,提高了測量精度

差分多普勒ΔDOD為差分單向差分距離對時間求導

采用射電星校正,約20 km基線的CEI系統,航天器角度測量精度可達70 nrad[7]。采用射電星校正雖然測量精度高,但是由于射電星信號微弱,需要面積較大的天線,成本較高,且轉動不靈活。目前,國際上也在研究沒有射電源校準的CEI系統,其中采用GPS衛星作為校準源是一種較好的方案。這樣天線可以做得很小,甚至約1 m的口徑就可以工作。基于GPS校準的CEI系統,100 km的基線,測角精度能達到300 nrad以下[6]。
可以通過GPS校準的CEI系統對同步軌道共位衛星絕對位置測量,對同步軌道共位衛星相對位置測量可以采用CEI系統同波束干涉測量。所謂同波束干涉測量(SBI),就是當兩個航天器在角度上非常接近時,它們可以在一個地面天線的同一波束內被觀測,使用兩個地面站天線對兩個航天器同時觀測,可以形成差分干涉測量。同波束干涉測量可以提供天平面上非常精確的相對位置測量量,作為對地基多普勒和距離測量視線信息的重要補充[4]。
SBI測量原理和差分CEI測量原理一樣,也是測量差分單向差分距離(ΔDOR)和差分單向多普勒(ΔDOD),僅僅是測量的兩個目標更近,兩個目標可以在同一個波束內,可以同時測量兩個目標,不需要天線切換。同步軌道衛星在±0.1°窗口內,兩顆衛星和測站的夾角<0.2°,目標可以落在天線的同一波束內,測控站對兩個航天器信號同時觀測,采用相同的時鐘頻率,時鐘誤差可以抵消。航天器信號如果頻率相近,可以采用寬帶接收設備同時接收,設備誤差僅存在群時延不一致性誤差,其它誤差幾乎全部抵消。通過SBI測量,可以高精度確定同步軌道衛星間的相對位置。
2 共位衛星位置測量精度分析
2.1 共位衛星絕對位置測量精度分析
同步軌道共位衛星絕對位置測量采用100 km基線的GPS校正CEI系統測量,CEI定位采用Rlm定位體制,目標的位置坐標(x,y,z)為

其中,l、m、n為3個方向上的方向余弦;R為目標到測量站的距離。
假設各個方向上的誤差一致,對式(9)求偏導,然后經過推倒,CEI定位精度公式經推導可用式(10)表示

其中,?R為測站測量航天器的距離誤差;R為測站到航天器的距離,取50 000 km,?α為CEI方向余弦角誤差。采用GPS校正的CEI系統對同步軌道共位衛星進行絕對位置測量,根據文獻[6]可知,方向余弦角度測量可以優于300 nrad。目前,測量站測距精度系統誤差優于2 m,隨機誤差優于1 m,傳播路徑誤差經修正后一般是m量級,所有測距誤差的均方和<10 m。按照上述條件,定位誤差約為31.21 m。
2.2 共位衛星相對位置測量精度分析
甚長基線干涉測量(VLBI)系統是目前測量精度最高的測量系統,采用甚長基線干涉測量系統,同波束干涉測量精度經過分析可達36 prad[5],滿足同步軌道共位衛星相對位置精度需求。但VLBI測量需要遠程傳輸,不能實時處理,并且安排觀測比較困難。這里采用CEI系統分析同步軌道共位衛星相對位置的測量精度。
文獻[5]對深空探測SBI測量差分相對距離誤差進行了詳盡的分析。誤差源包括太陽等離子體、電離層、對流層等引起的傳輸時延誤差,系統噪聲、相位漂移、航天器晶振漂移、未校準群時延或時鐘偏差引起的地面站測量誤差,基線誤差引起的測量誤差。同步軌道衛星是近地衛星,金星、火星等太陽行星旁航天器目標不同,它受太陽等離子體影響很小,可以或略不計。
同步軌道衛星是高軌衛星,離地面約36 000 km,CEI測量的各個測量站對衛星觀測的仰角都很高,這里分析取測量站仰角為45°。并不是所有同步軌道衛星都采用雙頻傳輸,這里分析取C頻段單頻進行分析,天線口徑10 m,積分時間1 s。單頻電離層影響較大,可以通過GPS長期觀測同步軌道共位衛星方向的電離層影響。通過GPS觀測,C頻段天頂方向電離層影響可以降低到30 mm以下。對流層和頻率沒有關系,可以采用GPS掩星觀測,對流層天頂方向影響可以降低到40 mm以下。如果采用微波輻射計校準,精度更高。根據上述條件,采用文獻[5]的分析方法,同步軌道共位衛星SBI測量差分相對距離誤差表1所示。
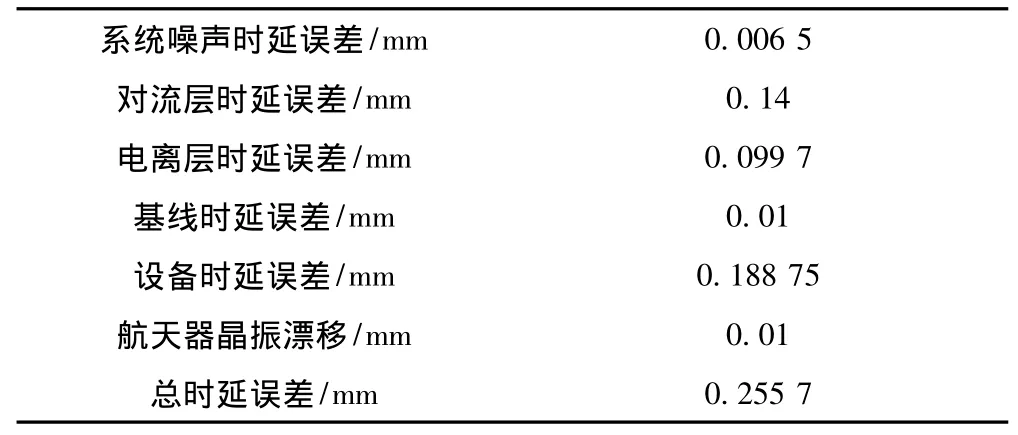
表1 差分相對距離誤差
兩目標相對位置可以通過式(9)分別計算出兩個目標的位置,對其作差,獲得其相對位置。對相對位置中距離、方向余弦角等變量求偏導。假設各個方向余弦誤差相同,通過化簡計算得到相對位置誤差為

其中,xAB,yAB,zAB是 A、B 兩個航天器 x,y,z位置坐標差。假設單站測距精度系統誤差為2 m,隨機誤差δR為1 m。由于系統差可以在定軌過程中扣除,這里計算精度按照隨機測距誤差計算。δRAB= δRA- δRB,δRA和δRB為測站測量航天器A和航天器的距離隨機差。RA為測站到航天器A的距離,ΔR為測站到航天器A距離和航天器B距離的差,δαAB為SBI方向余弦角誤差,δα為系統測量單個目標的方向余弦角誤差。
根據前面分析,基線100 km,方向余弦角45°,δα取300 nrad,δαAB為 3.6 nrad。取 RA為 50 000 km,ΔR<300 m,取值300 m。通過 CEI系統進行 SBI測量,相對位置誤差約為1.5 m。對于10 km的基線,誤差最大放大10倍,相對位置也可達<15 m。
3 結束語
同步軌道衛星用途廣泛,“多星共位”可以解決同步軌道衛星日益增長的需要。通過分析可以看出,采用CEI系統進行同步軌道共位衛星位置確定,100 km的基線,采用GPS校正絕對位置定位精度<50 m。采用SBI技術測量它們間的相對位置,相對位置定位精度可以達到m級。要達到同樣的測量精度,傳統的測距、多普勒跟蹤測量需要幾個小時甚至幾天的時間。而采用測距和連接端站干涉測量相結合,航天器三維位置可以在直接測定,能夠滿足同步軌道共位衛星高精度測量的要求。
[1]鄭軍,陳宏.GEO衛星壽命末期離軌控制策略[J].上海航天,2007(3):38-41.
[2]李果.同步軌道多星共位軌道保持技術研究[J].航天控制,1997(3):73-80.
[3]STTDEN L A.地球靜止軌道手冊[M].王正才,譯.北京:國防工業出版社,1999.
[4]CATHERINE L,THORNTON J SB.深空導航無線電跟蹤測量技術[M].李海濤,譯.北京:清華大學出版社,2005.
[5]FOLKNER W M,BORDER J S.Orbiter- orbiter and orbiter-lander tracking using same-beam inteiferometry[R].Taipei:TDA Progress Report 42 -109,1992.
[6]閆春生.基于GPS校準的CEI系統測量原理和精度分析[J].電訊技術,2003(4):20 -24.
[7]THURMAN S W.Information content of a single pass of phase-delay data from a short baseline connected element interferometer[R].Taipei:TDA Progress Report,1990.
[8]董光亮.BRT和CEI技術用于數據中繼衛星.測定軌的分析比較[J].飛行器測控學報,2004,23(1):6-10.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00