基于nRF905的水稻田監測系統的研究
2012-12-21 13:25:48黃招娣潘澤中黃德昌
華東交通大學學報 2012年6期
黃招娣,潘澤中,朱 路,黃德昌
(華東交通大學1.電氣與電子工程學院;2.信息工程學院,江西南昌330013)
水稻生長環境的優良是保持水稻質量和產量的重要前提,實時準確地監測水稻生長過程的水位、空氣溫濕度等水稻田環境參數。因此,搭建水稻生長環境參數信息監測系統,對提高水稻產量具有重要意義。
近年來,隨著無線通信技術和計算機技術的不斷發展,無線傳感器網絡(wireless sensor network,WSN)作為一種全新的信息獲取和處理技術,憑借其自組網、覆蓋范圍大、低功耗、低成本、智能化等特點,已逐漸滲透到農業領域[1-5]。
目前,無線傳感器網絡在農業方面的應用集中在對果園或田間作物生長參數和環境因子的監測,部署的傳感器節點通過無線的方式將果園或田間中探測的信息傳送給服務器[1-6]。
本文將無線傳感器網絡應用于水稻田環境監測中,實時采集水稻生長環境參數(水位、空氣溫濕度等),并通過GPRS技術實現手機終端接收水稻田環境參數監測數據[6-9]。從而對指導水稻精準管理、維護水稻田環境,節約水資源、節省成本、提高水稻產量具有重要意義。
1 水稻田環境監測的WSN系統總體設計
基于nRF905的水稻田環境無線監測系統主要包括3部分:傳感器節點、協調器、用戶終端。網絡體系結構模型如圖1所示。傳感器節點分為子傳感器節點和簇頭傳感器節點,具體功能如下。
1)子傳感器節點主要是采集水稻田生長環境參數(水位、空氣溫濕度等),并將采集數據處理后傳輸給協調器。
2)簇頭傳感器節點除了具有子傳感器節點的功能之外,還要擔任數據轉發功能,接收到子傳感器節點發送過來的數據并轉發給協調器。
3)協調器的功能主要是接收并處理各個傳感器節點發送過來的數據,并通過GPRS模塊將數據發送給手機用戶終端或通過串口發送給電腦終端。
4)用戶終端包括PC機或手機終端,主要用了給用戶顯示信息。
2 水稻田環境無線監測的硬件系統設計
2.1 傳感器節點
傳感器節點分為子傳感器節點和簇頭傳感器節點,其中兩種傳感器節點的硬件電路相同。傳感器節點采用了Atmel 公司STC89C52 單片機為核心處理器,擴展了nRF905的通信接口、總線接口、各種傳感器電路和供電電路。傳感器節點采用太陽能電池組件供電,擴展支持3路傳感器數據采集,通過nRF905實現無線傳輸[10-12]。
根據系統需求分析,水位傳感器采用了BPY800 液位傳感器;空氣溫濕度傳感器采用了Sensirion 溫濕度傳感器家族中的貼片式封裝系列的SHT10空氣溫濕度傳感器;水溫傳感器采用了投入式DS18B20數字溫度傳感器,以上3種傳感器都是已定標的數字式傳感器,其傳感器技術參數如表1所示。
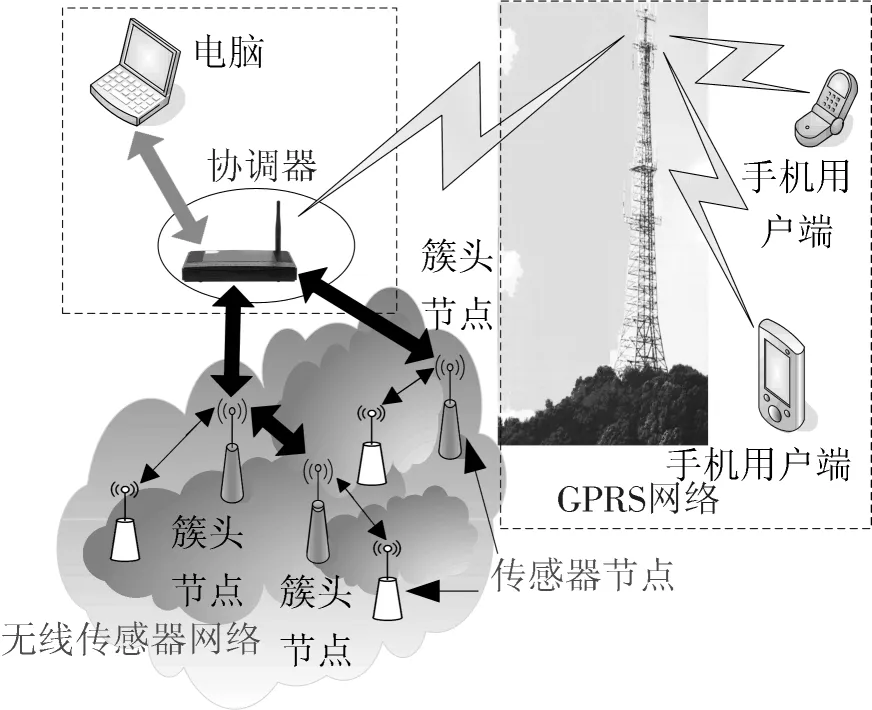
圖1 水稻田環境監測系統的網絡體系結構模型Fig.1 The network architecture model of environmental monitoring system for paddy field
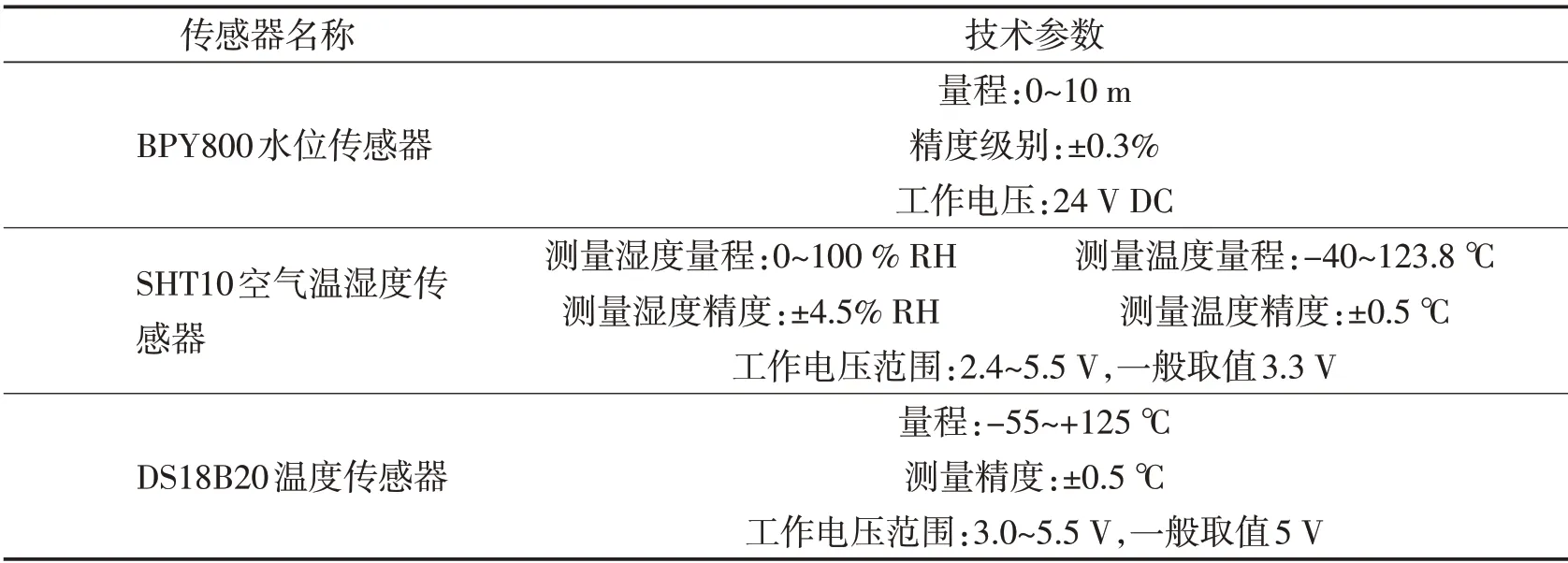
表1 傳感器技術參數Tab.1 Specifications of sensors
傳感器節點其主要由MCU(STC89C52 單片機)控制模塊、LCD1602 液晶顯示模塊、DS18B20 數字溫度傳感器模塊、PY800 水位傳感器模塊、SHT10 空氣溫濕度傳感器模塊、nRF905 無線通信模塊等模塊組成。如圖2所示。
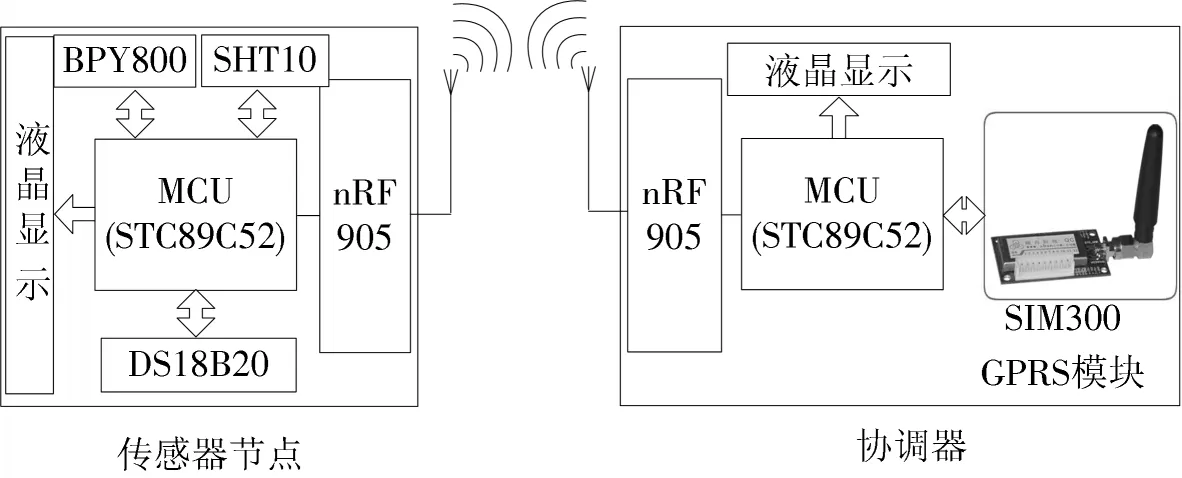
圖2 傳感器節點與協調器結構圖Fig.2 Structure diagram of sensor nodes and coordinators
2.2 協調器
相對于傳感器節點而言,協調器要求具有較強的處理能力和運行速度。因此,在設計中盡量減少協調器的硬件接口,主要由MCU(STC89C52 單片機)控制模塊、LCD1602 液晶顯示模塊、SIM300 GPRS 模塊、NRF905無線通信模塊等模塊組成,如圖2所示。
3 水稻田環境無線監測的系統軟件設計
uVsion是Keil softwave公司的產品,它集項目管理、編譯工具、代碼編寫工具、代碼調試及仿真于一體,適合于個人開發或人數少的開發團隊的使用。本系統采用uVsion軟件編寫系統程序,程序設計主要包括兩部分:一是傳感器節點程序的設計,其中傳感器節點程序設計分為子傳感器節點程序設計和簇頭傳感器節點程序設計;二是協調器程序的設計。
子傳感器節點主程序流程如圖3所示,當傳感器節點上的MCU控制器檢測到NRF905接收的命令后,傳感器節點上的MCU 控制器開始采集BPY800,SHT10,DS18B20 等傳感器信息,同時將采集的信息通過LCD1602小液晶顯示出現,并將采集的數據通過簇頭以多跳的形式傳輸給協調器。對于傳感器節點程序的設計,分別編寫了BPY800.c,SHT10.c,DS18B20.c,LCD1602.c,nRF905.c等子程序。
簇頭傳感器節點的程序設計與子傳感器節點的程序設計類似,重點區別在于簇頭傳感器節點的程序設計多了一種多跳路由功能,當子傳感器節點的數據上傳給簇頭節點時,簇頭節點識別到頭文件是否要發送給協調器;如果頭文件是需要上傳給協調器,其將繼續上傳,直至數據上傳協調器。
協調器主程序流程圖如圖4所示,當協調器上的MCU控制器檢測到SIM300 GPRS模塊接收的命令后,協調器上的MCU控制器開始接收各個傳感器節點所采集的數據,對數據進行處理并顯示在LCD12864液晶顯示屏上,同時將數據通過串口上傳給PC上位機或者服務器;也可以通過串口上傳給SIM300 GPRS模塊,從而發送給手機終端。對于協調器,分別編寫了nRF905.c,LCD12864.c,uart_serial.c等子程序。
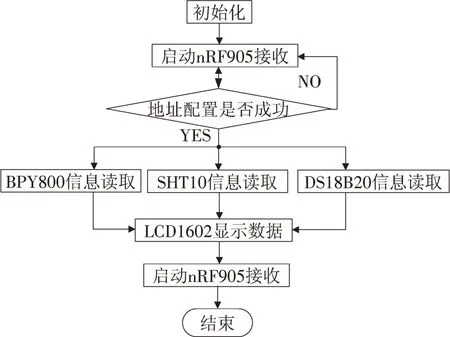
圖3 子傳感器節點程序流程圖Fig.3 The son sensor node program flow chart
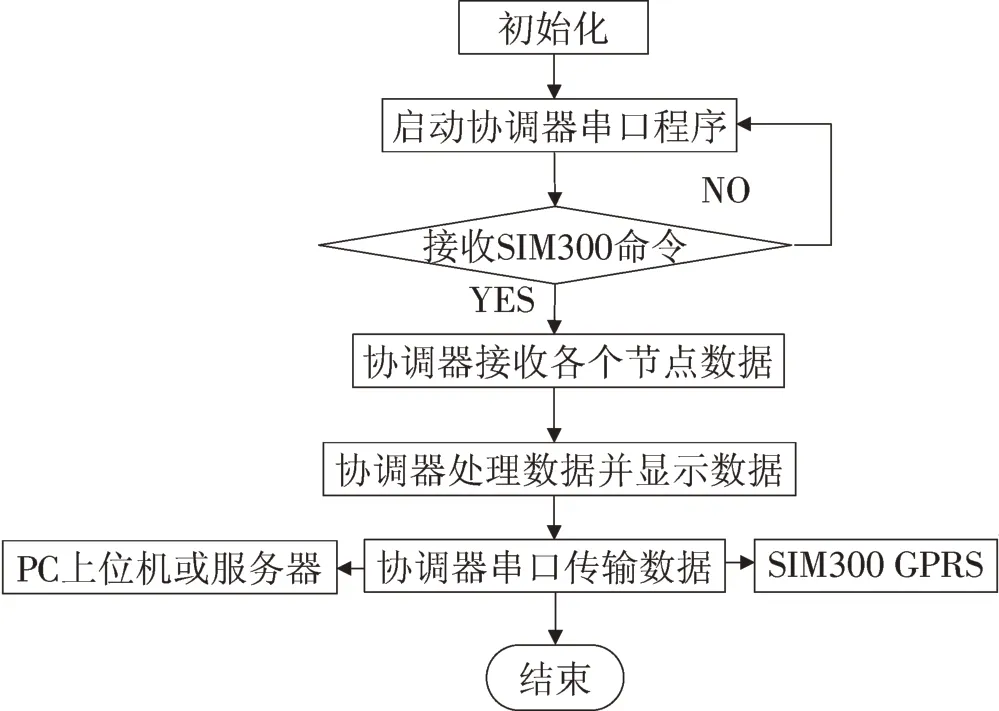
圖4 協調器程序流程圖Fig.4 Coordinator program flow chart
4 系統試驗結果與分析
在進行系統測試實驗之前,首先對傳感器節點之間的有效通信距離進行了試驗測試,以確保在整個網絡節點的有效通信距離內,便于網絡布置。為了得到現場測試真實數據,采取在不同環境下進行多次測試,以取得各個環境下的有效通信距離,如表2所示。
通過傳感器節點上的液晶顯示,可以直觀的看到無線傳輸過程中數據的誤碼率和丟失率,如果出現丟包,則認定傳輸距離達到限度。經過測試,采用節點的點對點通信,在實驗室環境中覆蓋范圍達到100 m2,最大的通信距離為36 m左右;在開闊無任何障礙物的操場上,晴天最大的通信距離為108 m左右、陰天有雨最大通信距離為87 m左右;在草叢中,晴天最大的通信距離為90 m左右、陰天有雨最大通信距離為75 m左右;在坡度為30°的山坡上測得有效最大通信距離為56 m。
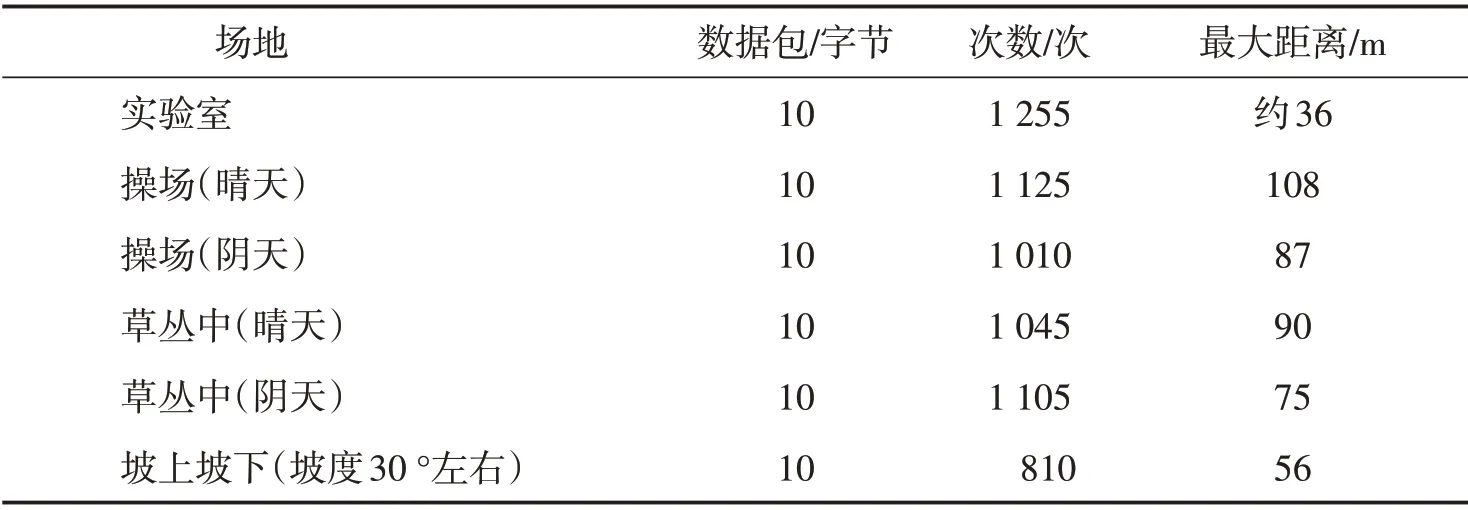
表2 距離測試數據表Tab.2 The data sheet of testing distance
該系統經過在水稻田環境中測試,運行穩定可靠,并可實時顯示水稻田的水位、空氣溫濕度、水的溫度等參數,并且通過手機終端可以獲取各個節點的參數信息。經對總面積位102 m2的稻田進行測試,在2012年5月27日下午14:30:30時所測得數據。如圖5、圖6所示,其中圖5是空氣溫度實測數據曲線圖,圖6是稻田里水的溫度實測數據曲線圖。
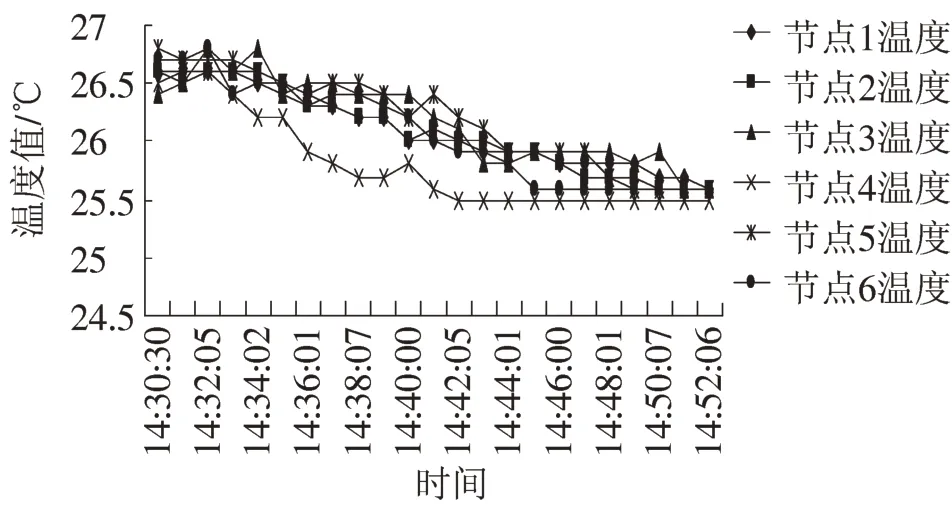
圖5 空氣溫度測試數據曲線圖Fig.5 The data curve diagram of air temperature testing
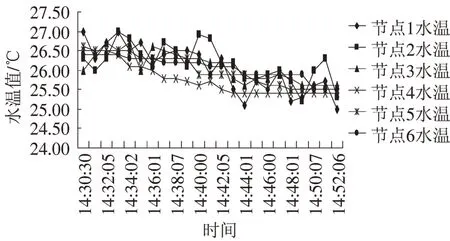
圖6 水溫度測試數據曲線圖Fig.6 The data curve diagram of water temperature testing
5 結束語
提出了一種基于nRF905的水稻田環境無線監測系統,在盡量減少成本的前提下,分析水稻田環境參數需求,采用分簇型網絡拓撲結構設計研究一種適合我國南方水稻田環境監測的無線監測系統。系統通過現場實際環境測試,系統運行穩定且具有很好的抗干擾能力,系統對指導水稻精準管理、維護水稻田環境,節約水資源、節省成本、提高水稻產量具有重要意義。
[1]劉航,廖桂平,楊帆.無線傳感器網絡在農業生產中的應用[J].農業網絡信息,2008(11):16-18.
[2]劉卉,汪懋華,王躍宣,等.基于無線傳感器網絡的農田土壤溫濕度監測系統的設計與開發[J].吉林大學學報:工學版,2008,38(3):604-608.
[3]KIM Y Y,ANS R G,IVERSEN W M.Remote sensing and control of an irrigation system using a distributed wireless sensor network[J].IEEE Transaction Instrumentaion and Measurement,2008,57(7):1379-1387.
[4]蔡義華,劉剛,李莉等. 基于無線傳感器網絡的農作物信息采集節點設計與試驗[J]. 農業工程學報,2009,25(4):176-178.
[5]杜尚豐,李迎霞,馬承偉,等.中國溫室環境控制硬件系統研究進展[J].農業工程學報,2004,20(1):7-12.
[6]楊光松.基于nRF905的無線溫度數據采集系統[J].微計算機技術,2008,24(8):104-106.
[7]王廣運,郭秉義,周波.nRF905無線通訊模塊在無線數據采集系統中的應用[J].工業控制計算機,2005,18(7):7-8.
[8]孫寧,劉欣慰,趙印.基于融合算法的火災遠程監控報警系統設計[J].軟件導刊,2008,7(7):54-55.
[9]ANU B,MIKE Z.Sensors and wireless communication for medical care[C]//International Workshop on Database and Expert Systems Applications(DESA),2003:956-960.
[10]金保華,張勇,崔光照.基于nRF905的無線數據多點跳傳通信系統[J].儀表技術與傳感器,2004(9):39-40.
[11]謝欣,張恒,等.基于能量與功率控制的TopDisc拓撲算法研究[J].華東交通大學學報,2010,27(3):58-61,87.
[12]湯文亮,陳松,等.基于EDV-Hop的免測距定位算法研究[J].華東交通大學學報,2012,29(3):40-45.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年11期)2019-01-07 01:28:02