基于超聲波測距的自動尋跡泊車系統模型設計*
2012-12-22 05:58:54戴紹港石學誠
電子器件 2012年2期
戴紹港 ,石學誠
(杭州電子科技大學通信學院,杭州310018)
自動泊車系統[1-7]是一種通過探測車輛周圍環境信息來找到合適的泊車位,從而控制車輛的轉向、速度,使得車輛能夠自主駛入泊車位的系統。自動泊車技術是現代車輛智能化的研究熱點之一,受到了越來越多的關注。雖然自動泊車系統還沒有在汽車市場展開大規模的應用,但隨著汽車和電子工業的發展,以及智能控制算法的研究與發展,自動泊車系統將得到更大的應用空間。相比于人工泊車事故率高、傳統倒車雷達智能度低,自動泊車系統提高了車輛的智能化水平和安全性,進一步降低了新手司機駕駛車輛的難度,也為將來實現車輛的自動駕駛打下基礎。
1 原理與算法設計
1.1 聲源定位算法
在現有的麥克陣列聲源定位方法中,基于時延估計的定位方法精度相對較高,且在實際中可以實時實現[8-9]。時延估計算法可采用廣義互相關算法來實現,廣義互相關法通過求兩信號之間的互功率譜,并在頻域內給予一定的加權來抑制噪聲和反射的影響,再反變換到時域,從而得到兩信號之間的互相關函數。該互相關函數的峰值位置即兩信號之間的相對時延。
由于本系統中發射的信號為超聲波信號,且整個系統(移動臺與主控中心)是完全協同工作(合作)的模式,為了降低系統的復雜度與系統可實現性,可采用比較傳統的時延估計方法,即利用系統中移動臺發送超聲波信號的同時告知主控中心,主控中心及時打開定時器,當主控中心判定收到信號時關閉定時器,然后計算兩者的差值Δt,即可獲得時延估計值。
考慮系統本身的要求,采用了二維的定位方法。假定移動聲源的初始位置為S 點,即直角坐標為(rcosθ,rsinθ),同時把A 與B 兩超聲波接收器的位置也放于坐標系中,即A(-0.5,0),B(0.5,0),W 點為停車位置。由圖1 可計算得到:

其中c 為超聲波的傳播速度,Δt 為時延估計值。移動聲源S 向y 軸靠近時θ 角不斷增大,當達到y 軸時θ 角為90°,則SA=SB,此時Δt=0,反之亦然。因此,當收到時延誤差信號為0 時,則可以判定移動聲源已達到OW 軸即坐標y 軸。同樣的理論,當移動聲源達到OW 軸之后,再向W 點前進時,可利用A 和C 兩超聲波接收器通過計算時延值來判定移動聲源位置,當該時延值接近O 時,可斷定該移動聲源已到達W 點。

圖1 二維聲源定位圖
1.2 超聲波測距原理
超聲波測距原理[10-11]為聲波發射器向某一方向發射超聲波,在發射時刻的同時開始計時,超聲波在空氣中傳播,途中碰到障礙物就立即返回來,超聲波接收器收到反射波就立即停止計時,通過兩者的時間t,利用公式:

計算障礙物距離,其中d 為發射器與障礙物之間的距離,v 為聲波在介質中的傳播速率,由下面的計算公式得到:

式中:τ為攝氏溫度。
1.3 運動控制原理
當發出一個超聲波脈沖時,移動臺上的CPU 通過無線模塊向接收站發送聲源啟動信號,由于無線模塊的信號載波是2.4 GHz 電磁波,其在空間的傳輸時間較小可忽略不計。當主控中心接收到聲源啟動信號時,通知兩個接收站分別打開各自的定時器,開始計時,同時偵聽超聲波信號。當收到超聲波信號時,立即關掉定時器,計算移動臺到達各站所用時間之差,然后將此差值信號通過無線傳回移動臺。差值越小表明距離目標位置越近,當差值接近零時,說明聲源已到達目標,立刻停止。由上可知,用兩接收站接收到超聲波信號的時間差作為誤差信號能夠較好的控制移動臺的運動狀態。
2 系統的電路設計
2.1 系統的總體結構框圖
根據系統的總體要求,所設計的系統總體結構框圖如圖2 所示,主要由主控中心和移動臺(移動小車)兩大部分組成,其中移動臺由CPU 控制器單元、無線收發單元、超聲波發射單元、以及移動臺電機與其驅動單元等組成;主控中心則由CPU 控制與處理單元、無線收發單元、多組超聲波接收器單元、以及顯示單元等組成。

圖2 系統的總體框圖
系統設計的主要特點為:以飛利浦低功耗ARM芯片LPC2103 為核心處理芯片,包括電機驅動,無線傳輸,超聲波信號產生與接收,LCD 顯示等功能模塊組成,使超聲波收發與無線模塊之間協調工作,讓單片機能將移動臺與接收站的數據實時反饋形成閉環系統,進而大大地提高了系統的穩定性與精確性。
2.2 系統主要硬件設計
2.2.1 超聲波發射與檢測接收電路
接收電路如圖3 所示。
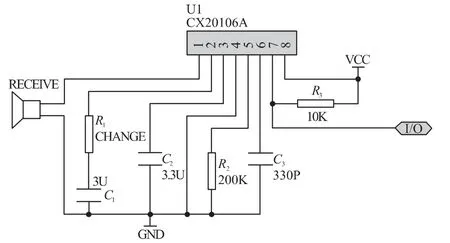
圖3 超聲波接收電路原理圖
在移動臺端,通過超聲波發射器發出方波脈沖,其頻率為39 kHz。3 個檢測站(A,B,C)采用超聲波接收探頭和CX20106A 芯片作為接收處理電路,調節該芯片第2 腳與地之間的電阻及電容可調節芯片的靈敏度,實際設計時,采用電位器與3 μF 的電容串聯,然后調節電位器的阻值,使系統輸出增益達到最大值;同時調節第5 腳的外接電阻(實際阻值為200 kΩ),可改變接收頻率,使之達到39 kHz 左右。接收站可以接收到衰減較少的超聲波信號,進而通過CPU 判斷各個接收端與移動移動臺的之差,最終轉化為控制移動臺移動的指令。
2.2.2 無線收發電路
系統采用Nordic 公司的nRF24L01 無線收發模塊[12-13],其工作在2.4 GHz,外圍電路簡單,只需極少量的外圍電感、電容、電阻,即可構建一個完整的通信模塊。如圖4 所示,其中天線這里采用銅線,在阻抗匹配的條件下,能傳輸較遠的距離,且能滿足系統要求。
3 軟件設計及系統工作流程
系統工作流程如圖5 所示,在軟件程序設計時,要考慮系統程序通過無線收發模塊使主控中心和移動臺形成閉環系統。移動臺發送超聲波脈沖的同時,無線模塊發送計時信號開啟定時器計算移動臺與主控中心的兩接收站之間的實時時間差,當此時間接近零時,主控中心發送無線信號,控制電機作相應制動。

圖5 系統工作流程圖
4 系統測試
4.1 測試條件與方法
根據圖1 按照實際停車位的5 ∶1比例在W 點設置模型車位,首先把3 個超聲波接收站分別放到規定的位置A,B,C 上,其次按照要求,把裝有無線收發模塊的移動車模放到OW 線右側50 cm 處位置,通過超聲波引導讓其到達指定位置,記錄停止位置與指定位置之間的距離、整個過程的時間,并與指標的要求誤差范圍和速度進行比較。
4.2 測試數據結果
測試結果如表1 所示。

表1 OW 右側的車模駛向W 點(在OW 上)時的測試結果
5 結論
本文所提出的利用超聲波測距原理來引導汽車的自動尋跡與泊車系統模型,巧妙的利用了信號特征實現對載有超聲波的移動臺進行精確引導。由于超聲波傳感器的良好特性,選用多個超聲波傳感器組成傳感器系統,通過編組協同工作,用來探測有效車位和車輛相對位置,具有一定的創新性,且功耗低,具有很大的成本上的優勢。
[1] Massaki Wade,Kang Sup Yong,Hideki Hashimoto.Development of Advanced Parking Assistance System[J]. IEEE Transactions on Industrial Electronics,2003,50:4-16.
[2] Chiu Chian-song,Lian Kuang-yow,Liu Peter.Fuzzy Gain Scheduling for Parallel Parking a Car Like Robot[J]. IEEE Transactions on Control Systems Technology,2005,13(6):1084-1092.
[3] Paul Green. Parking Crashes and Parking Assistance System Design:Evidence from Crash Databases,the Literature and Insurance Agent Interviews[J]. SAE World Congress,2006,1:1685-1700.
[4] 郭孔輝,姜輝,張建偉,等.基于模糊邏輯的自動平行泊車轉向控制器[J].吉林大學學報(工學版),2009,39(2):236-240.
[5] 何建國,張文勝,趙根莊. 智能泊車引導方法的研究與實現[J].地理空間信息,2007,5(2):3-5.
[6] 付菊芳,張小龍,東亞斌. 國外汽車自動停車系統的介紹與分析[J].中國科技信息,2009,(2):259-26.
[7] 何峰.一種應用于自動泊車系統的車位檢測方法[J]. 傳感器世界,2009,3(1):24-27.
[8] 崔瑋瑋,曹志剛,魏建強.聲源定位中的延時估計技術[J]. 數據采集及處理,2007,22(1):90-99.
[9] 孫韶杰,孫紹俊,李國輝,等.一種改進的聲測定位時延估計算法[J].計算機應用,2006,(11):2696-2723.
[10] 許天增,許克平,許茹,等.超聲傳輸特性和超聲傳感系統研究[J].廈門大學學報,2001,2:34-35.
[11] 田燕. 超聲波的物理特性及應用[J]. 現代物理知識,1996,11(1):7-9.
[12] 張克滿,史儀凱.基于DSP 和nRF2401 芯片的數字無線視頻采集系統設計[J].微電子學與計算機,2005,(3):93-95.
[13] 廖平,喬剛. 基于nRF2401 的近距離點對多點無線通信系統[J].現代電子技術,2006,(11):18-20.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
