星群、星座與編隊飛行的概念辨析
2012-12-29 04:13:34林來興張小琳
航天器工程 2012年5期
關鍵詞:系統
林來興 張小琳
(1 北京控制工程研究所,北京 100190)(2 北京空間飛行器總體設計部,北京 100094)
1 引言
《航天器工程》2012年第4期刊登了“衛星集群概念研究”[1]一文,這篇文章值得商榷。該文將“Satellite Cluster”英文譯為衛星集群,實際應理解為“星群”,這是國內外公認的,不宜再作新的解釋,星群(Cluster)也可以認為是衛星集群的簡稱。
編隊飛行各顆衛星有同構和異構之分,F6屬于異構編隊飛行,對它編隊飛行的要求放寬很多,只要達到各顆衛星能互相聯系(信息交換連接),為此F6稱為分離模塊自由飛行航天器。歷史上曾經出現過模塊化衛星,要求對單顆衛星的各分系統、主要部件實現模塊化、標準化,后來又進一步提出分離模塊衛星的概念,這些概念是很清晰的,無須提出一個衛星集群的新概念。
文章第4節“衛星集群社會關系層次”顯得有些牽強附會,因為衛星是一個空間產品,根據應用需求發展為星群、星座和編隊飛行等,它們是物理上存在的狀態,與社會關系有完全不同的性質。
文章多處強調,模塊化分離衛星并不是單顆衛星。這是作者誤解或者不理解,既然是模塊化分離,那當然就是多顆衛星。
到目前為止,的確有些書刊文獻存在對分布式空間系統、編隊飛行、星座等確切的概念和內容說法不一,例如有文獻說,“衛星編隊飛行又稱分布式空間系統”;也有文獻明確說,“從軌道動力學角度,分布式衛星系統表現為多顆衛星的編隊飛行”;還有把編隊飛行和星座混為一談,也有認為分布式衛星系統的各顆衛星之間在動力學上存在直接的相互作用關系。為此,本文對屬于分布式衛星系統的星群、星座和編隊飛行(含F6)的概念和它們之間的區別闡述自己的認識,供大家討論。
2 分布式衛星系統的概念和內涵
星群、星座與編隊飛行都屬于分布式衛星系統(Distributed Satellite System,DSS)[2]。它們之間的相互關系如圖1所示。
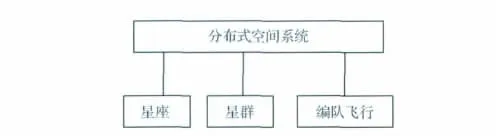
圖1 分布式空間系統內涵Fig.1 Content of distributed space system
現將分布式衛星系統的概念和內涵簡介如下:
分布式衛星系統的定義是:由2顆或2顆以上衛星按一定要求分布在1種或多種軌道上,共同合作完成某項空間飛行任務(例如:觀測、通信、偵察、導航等),從而獲得更大價值的衛星系統。在這里有必要明確一個重要概念:分布式衛星系統各顆衛星之間在動力學上是獨立的,根據對分布在空間各顆衛星之間是否有外加星間閉路軌道控制系統和對分布在空間的各顆衛星運行過程中是否進行任何軌道操作這2項原則來確定的分類如下。
(1)編隊飛行(Formation Flying)。在軌道上,分布式衛星系統的各顆衛星按自己的軌道特性運行,只有外加星間閉路控制系統才能保證它們按編隊飛行要求保持隊形。也就是說,分布式衛星系統各顆衛星必須有外加星間閉路軌道控制系統才能成為編隊飛行。
(2)星座(Constellation)。分布在軌道上的各顆衛星主要目的是增加對地面的覆蓋面積,或者縮短重訪時間。這里不須要外加星間閉路控制系統。一般通過地面站對單顆衛星進行軌道位置調整就能滿足星座要求,這是由于各顆衛星受到軌道攝動使軌道位置發生變化。星座軌道保持控制是定期的,例如幾天或幾十小時進行1次控制,周期長短決定于星座軌道攝動大小和星座位置保持精度。
(3)星群(Cluster)。根據空間飛行任務要求,設計各顆衛星在軌位置,當衛星發射成功以后,在運行期間不須要進行軌道操作,各衛星若受軌道攝動,所產生的位置變化也不影響飛行任務的完成。也就是說,星群不須要外加星間閉路控制系統,也不須要軌道操作,它是分布式衛星系統最簡單的一種形式。星群大部分用于空間環境參數的觀測任務,因為衛星有一定的工作壽命,在此期間衛星因軌道攝動,引起其位置變化不影響任務完成;例如ESA 的4 顆“團星”(Cluster-1、2、3、4)組成星群用來觀測地磁場分布與變化。
3 編隊飛行
3.1 編隊飛行基本概念[3]
由若干個衛星構成一個特定形狀,這個特定形狀的各個衛星,一方面保持這個形狀,同時又繞星球中心旋轉。編隊飛行各星相互協同工作。每個衛星都同其它衛星保持聯系,共同承擔信號處理,通信,有效載荷工作等,其任務功能是由整個編隊飛行的各個衛星共同來完成,整個星群構成一個大的“虛擬衛星”。單個衛星基本不能發揮功能作用。編隊飛行的集合體有時又稱為虛擬衛星。
編隊飛行分為同構編隊飛行和異構編隊飛行兩種:同構編隊飛行各顆衛星組成結構相同;異構編隊飛行的各顆衛星組成結構不相同。F6就是典型的異構編隊飛行。
3.2 編隊飛行分類
根據編隊飛行各顆衛星之間對外加閉路控制系統要求的不同,編隊飛行又可分為以下3種:
(1)精確編隊。須要采用空間自主精確控制與測量技術,從而嚴格保持編隊的隊形。各衛星之間是通過控制與測量系統,實現互相耦合的。
實例:類地行星探測器-1(TPF-1),恒星成像(SI),磁層空間大氣層X 射線成像試驗(MAXIM)。
(2)知識編隊(Knowledge Formation)。編隊飛行各個衛星之間有測量信息,但是星間不進行協調控制,也就是說編隊飛行的隊形是隨時進行測量,獲得隊形分布狀態,但不須要進行嚴格隊形保持。
實例:激光干涉儀太空天線(LISA),地球重力場恢復與氣候實驗衛星(GRACE),三維定位系統(電子偵察衛星)[4]。
(3)合作編隊。星間狀態測量和控制僅在某階段或一個時期進行,不須要長期進行測量和控制。
實例:在軌自主空間組合,自主交會。
3.3 編隊飛行的優勢
衛星編隊飛行理論研究,早在上世紀70年代就開始,但是真正具有應用背景,而且引起世人極大關注是在上世紀90年代末期。為什么會引起世人如此關注?其原因在于編隊飛行具有一系列優勢,例如:
(1)編隊飛行可構成空間應用的一種新概念——虛擬衛星;
(2)可提供極大測量基線,從而促進下列領域的發展,如,星載干涉儀、全球遙感、同步目標跟蹤觀測等;
(3)可由輕巧靈活的小衛星代替龐大復雜的大衛星;
(4)編隊飛行衛星可以隨時加入或退出(故障),具有很高的重構性、冗余性、安全可靠性;
(5)編隊飛行一般都要協調聯合控制,星間交換信息量很大,而且測量與控制要求精度高,為此需要高度自主性,從而也降低對地面站的依賴。
具有任務背景的衛星編隊飛行應用項目越來越多,同時也證明上述編隊飛行優勢越來越大。為此可以預測隨著時間推移,這個優勢還會增大。
3.4 編隊飛行目前的研究進展
編隊飛行出現在上世紀末期,由于成本低、重量輕、研制周期短的小衛星快速發展,推動了編隊飛行研究。本世紀以來編隊飛行已成為空間技術的熱點研究課題,目前,大部分是動力學理論研究和設計方案論證,一部分為空間飛行試驗。在地球軌道編隊飛行對軍、民用都具有很大的優勢,例如,多顆微波雷達衛星組成精確編隊飛行,具有提高地面分辨率、可測量高程與監測地面低速運動目標、擴大覆蓋幅寬等優點。但是由于低軌道地球扁平引起J2擾動,為了保證微波雷達相位同步,運行一年每顆衛星需要速度增量達上千米每秒,這樣巨大的燃料消耗,使好的編隊飛行無法在低軌道實現。為此,目前只能進行前后兩星串聯簡單編隊的空間飛行試驗。多顆衛星在不同軌道的圓形編隊飛行就很難實現,這是今后編隊飛行攻關的重點課題。
3.5 異構編隊飛行的F6項目
F6項目全稱為“Future、Fast、Flexible、Frac-tionated、Free-Flying Spacecraft united by information exchange”[5],中文譯為“通過信息交互連接的未來、快速、靈活、分離模塊的自由飛行航天器”,它是美國國防預先研究計劃局(DARPA)先進航天術技研究與演示驗證項目,為了創建未來、快速、靈活、長壽命、多功能的航天器。F6研究任務,把衛星各分系統、有效載荷、能源、通信導航、計算機等分解為多個標準模塊,每個分離模塊仍然是一個衛星,但是標準模塊可以成批生產,從而大幅度降低成本、縮短生產周期,在軌道上哪個模塊發生故障都可以快速更換,最終達到長壽命。
F6還要解決6項關鍵技術:自主發現、自動配置、故障自愈、自組織網絡、安全可靠和抗干擾等技術。這種分離式模塊化衛星完全克服過去單個模塊化衛星受到的各種制約,但是初期投資成本很高,只有推擴應用以后,才能降低成本。但是快速、靈活、安全可靠性高、生存能力強等優勢,對軍用衛星來說,這些是比經濟成本更重要的。
F6項目從2006年開始至今已有6年,先后完成概念設計與方案論證、關鍵技術研制,目前正在準備首次空間飛行演示驗證,預計最少也需要3~4年時間才能完成全部空間飛行演示驗證,真正分離模塊衛星上天還要再加4~5年,然后才能評價F6任務的真正價值。為此F6項目前景存在較多未知數,絕不像文獻[1]在文章結束語所說的那樣簡單。
4 衛星星座
為完成某一特定空間任務而協同工作的多顆衛星的集合,主要目的是增加對地面的覆蓋面積,或者縮短重訪時間。星座這個名詞來自天文學,按其定義,是群星在天球上的分布形態,最早來源自一個拉丁字,意即“星星聚集”。隨著空間技術的發展,人們把這一天文學名詞加以引伸,根據各種應用的需要,建立各種衛星星座。
4.1 星座分類
(1)按應用分類:分為導航星座,通信或數據中繼星座,遙感星座(偵察、預警、環境監測等),科學試驗星座等。
(2)按覆蓋要求分類:可用覆蓋面積、覆蓋重數、時間分辨率這三個指標來劃分。按覆蓋面積分為全球、地帶(緯度限制、經度不限)、區域(緯度和經度均受限制);按覆蓋重數可取值為一重、二重、三重和四重等。按時間分辨率可分為連續、間斷(10分鐘、半小時、幾小時等)。
(3)按軌道分類:分為近地軌道、中軌道、地球同步軌道、橢圓軌道、混合軌道等。
4.2 星座軌道設計
星座軌道設計首先取決于應用,不同星座的應用,具有不同星座軌道結構。各種星座軌道設計很復雜,人們仍然能夠把星座軌道設計有關參數和影響因素歸納在表1中。
在軌道設計中有一種最常見的衛星星座,稱為均勻對稱圓軌道星座,包括δ星座、玫瑰星座、σ星座等。其共同特點是衛星星座中各軌道面在空間均勻分布,衛星在各軌道面內也均勻分布,不同軌道面間衛星的相位(指從衛星的升交點沿衛星運行方向至衛星星下點之間的球面角距)保持一定的相對關系。均勻對稱圓軌道星座對全球有均勻的覆蓋特性,在全球一重或多重連接覆蓋類航天任務中常常采用這種星座。δ星座的概念最早由英國皇家飛行研究中心的J.G.沃克(Walker)提出,因而也稱為沃克星座。δ星座用參考碼中T/P/F和一個角度δ標記。參考碼中T表示衛星星座中包括的衛星總數,P為衛星星座中的軌道面數目,F是用以確定相鄰軌道面衛星相對相位的因子(F=0,1,2,3,…,P-1),角度δ是衛星星座中所有軌道面相對參考平面(通常為赤道平面)的夾角。對于參考碼為T/P/F的δ星座,每個軌道面內均勻分布S顆衛星,S=T/P,相鄰軌道面衛星的相位相差為F個星座基本單位。星座基本單位簡記為PU,定義為PU=360°/T。參考碼為18/3/1,δ=55°的δ星座,即各顆衛星軌道傾角均為55°。玫瑰星座是軌道面數目P=T的一種特殊的δ星座,因其軌道在天球上的投影像一朵盛開的玫瑰花而得名。

表1 星座設計中幾何結構因素[6]Table 1 Geometrical factors of satellite constellation design
4.3 星座的應用與發展
衛星星座的發展始于20世紀60年代。當時,人們認識到利用3顆在地球靜止軌道上空均勻分布的地球靜止衛星,可以實現除兩極外的全球通信。之后,隨著空間技術進步和應用方面需求,使得衛星星座的應用數量日益增加,它主要應用于3個方面。
(1)通信。如用于電視轉播的地球靜止軌道衛星星座,用于移動通信的地球低軌道的“銥”(Iridium)系統、“全球星”(Globalstar)系統,“軌道通信”(Orbcomm)系統等。一些國家軍用通信衛星也往往采用星座的形式,如美國軍用通信衛星中的“國防衛星通信系統”衛星(DSCS)、“艦隊通信衛星”(Flt-SatCom)系統,蘇聯/俄羅斯軍用通信衛星中的“閃電”(Molniya)衛星系統等。
(2)導航。如美國軍用導航衛星系統中的“子午儀”(Transit)導航衛星系統(已關閉),“導航星”(Navstar)全球定位系統(GPS),蘇聯/俄羅斯的全球導航衛星系統(GLONASS),歐洲“伽利略”(Galileo)導航星座和中國“北斗”(Compass)二代導航星座等。
(3)地球觀測。用于軍事目的的偵察衛星、海洋監視衛星、電子偵察衛星、預警衛星等。
隨著空間技術的發展,特別是現代小衛星的出現,使得衛星星座應用在經濟上和技術上具有很大優勢。小衛星對地觀測星座,特別是在低軌道的軍事偵察、目標指引和監視小衛星星座,具有高的空間分辨率和時間分辨率,甚至可以達到時間分辨率趨近零的連續偵察,而且投資成本是可以接受的。例如,通過納型衛星組成的星座。這里僅討論6U 立方體納型衛星星座(其他納型衛星組成星座的工作原理相同)[7]。
目前較普遍采用Walker星座,具體要求:星座每顆納型衛星的軌道高度和傾角完全相同,軌道為圓軌道(e=0)。例如:對軌道高度為450km 的這種星座,重訪時間為60min,需要35顆衛星;45min,需要50顆衛星;30min,需要65顆衛星;15min,需要100顆衛星;5 min,需要300顆衛星。如圖2所示(軌道傾角i=55°)。
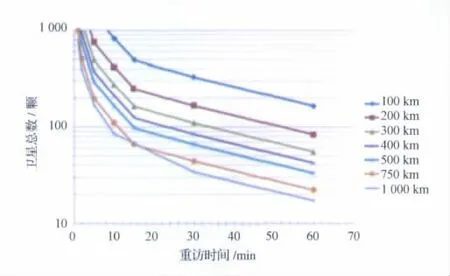
圖2 Walker星座重訪時間與衛星數量的關系Fig.2 Relation between the revisit time and satellite number for Walker constellation
該星座由多顆6U 納型衛星(結構見圖3所示)組成,每顆衛星由2×3個立方體(6U)組成,衛星技術指標如下。
(1)衛星尺寸:20cm×20cm×30cm;
(2)質量:8kg;
(3)光學孔徑:9cm;
(4)光學焦距:1.2m;
(5)空間分辨率:3.5 m(在450km 高的圓軌道);
(6)姿態指向精度:0.01°;
(7)下行數據傳輸率:≥0.5 Mbit/s;
(8)壽命:3年。
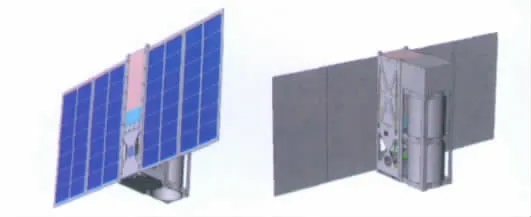
圖3 6U 納型衛星結構外形Fig.3 Appearance of the 6U Nano-satellite
每顆6U 納型衛星成本為100萬~150萬美元。由50顆納型衛星組成的對地觀測衛星星座可以實現全球覆蓋,重訪時間約45min,空間分辨率為3.5m(屬于高分辨率范圍)。50顆納型衛星成本為5 000萬~7 500萬美元,這還不到1顆大衛星的成本。若重訪時間提升到15 min,估計需要100顆納型衛星,其成本也僅需要1億~1.5億美元,相當于目前1顆大衛星的成本。投資這樣少的資金就能完成一個全球覆蓋、實時態勢感知和敏感目標監測的任務,這將對軍事應用起到重大作用。
5 編隊飛行和星座的區別
早期編隊飛行與星座兩者概念的區別并不十分清楚,甚至同一個問題在不同場合有兩種稱呼。目前書刊文獻中仍然存在有這一現象。由于最近編隊飛行技術迅速發展,它與星座概念已經有明顯區別:
(1)編隊飛行在應用上構成一個新概念——虛擬衛星,而星座僅增加地面覆蓋區域,或縮短重訪時間。編隊飛行與星座的衛星有效載荷有很大區別:通常的衛星星座是以一定數量的完全相同的衛星平臺和有效載荷組合起來的,解決空間和時間覆蓋問題,其使命比較簡單。編隊飛行的有效載荷是由各星共同組成的,單顆衛星無法發揮作用,而星座中單顆衛星仍可發揮作用,只不過是使地面覆蓋區域減少。
(2)編隊飛行各星之間的相對隊形保持是依賴外界控制系統,并成閉合回路;而星座則以單顆衛星軌道運動,星與星之間沒有直接的動力學關系,星座位置保持是通過單星軌道控制保持對地覆蓋特性。
(3)編隊飛行星間距離短,各星之間是緊密型的,星間有通信和信息交換,各星是協同工作的,而星座各星之間是稀疏型的,可以不存在任何信息交換和服務。
(4)從控制觀點來看,編隊飛行一般要求實現自主、實時,多個衛星協調閉環控制,而星座控制一般達不到這種自主級別的實時協調控制能力,而只要求星座中各衛星的位置保持在規定精度的控制區內,不致發生相撞,或者在某種意義上不改變對地球的總體覆蓋特性。
6 結束語
本文對星群、星座與編隊飛行(含F6)的概念和它們之間相互的區別作了明確論述,可對糾正當前有些書刊文獻中存在的有關星群、編隊飛行、星座等模糊不清的概念有所幫助。
(References)
[1]董云峰,王興龍.衛星集群概念研究[J].航天器工程,2012,21(4):83-88
DongYunfeng,Wang Xinglong.Research on conception of satellite cluster[J].Spacecraft Engineering,2012,21(4):83-88(in Chinese)
[2]Leitner J A.Spacecraft formation flying-an overview of missions and technology challenges,AAS 07-031[R].Washington:AAS,2007
[3]林來興.分布式空間系統和航天器編隊飛行辨析[J].航天器工程,2008,17(4):24-29
Lin Laixing.Study on distributed space systems and spacecraft formation flying[J].Spacecraft Engineering.2008,17(4):24-29(in Chinese)
[4]林來興.分布式小衛星系統的技術發展與應用前景[J].航天器工程,2010,20(1):60-66
Lin Laixing.Technological development and application prospects of distributed small satellite system [J].Spacecraft Engineering,2010,20(1):60-66(in Chinese)
[5]DARPA.Appendix1F6 Developer’s[R].Arlington:DARPA,2010
[6]林來興,車汝才.衛星編隊飛行精確動力學模型與三維定位系統[J].宇航學報,2008,29(3):831-837
Lin Laixing,Che Rucai.Accurate dynamics models of satellite formation flying and 3-dimension positioning system[J].Journal of Astronautics 2008,29(3):831-837(in Chinese)
[7]Andrews J.Constellation of distributed NanoSats for real time earth observation,IAA 2011B8-1002[C]//8th IAA Symposium on Small Satellites for Earth Observation.Berlin:IAA,2011:4-8
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32