基于SVPWM 的永磁同步電動(dòng)機(jī)直接轉(zhuǎn)矩控制
2013-03-04 05:23:22楊秀芹鄒開鳳張曉杰
防爆電機(jī) 2013年6期
關(guān)鍵詞:系統(tǒng)
楊秀芹,鄒開鳳,張曉杰
(海軍航空工程學(xué)院青島校區(qū),山東青島266041)
0 引言
DTC 理論于20 世紀(jì)80 年代由德國學(xué)者M(jìn).Depenbrock和日本學(xué)者I.Takahashi 首先針對(duì)異步電動(dòng)機(jī)提出,90 年代Zhong.L,Rahman MF,Hu.YW 等學(xué)者提出PMSM DTC 理論[1]。與矢量控制相比,由于DTC 系統(tǒng)具有控制系統(tǒng)結(jié)構(gòu)簡(jiǎn)潔、轉(zhuǎn)矩動(dòng)態(tài)響應(yīng)快、對(duì)電機(jī)參數(shù)依賴少、對(duì)電動(dòng)機(jī)參數(shù)變化魯棒性好等優(yōu)點(diǎn)[2]受到普遍關(guān)注。傳統(tǒng)DTC 技術(shù)在永磁同步電機(jī)上的研究還并非十分完善,在有些方面仍存在欠缺,如出現(xiàn)較大的定子磁鏈和轉(zhuǎn)矩脈動(dòng)、開關(guān)頻率發(fā)生變化而不恒定、功率器件的容量無法得到充分利用等[3]。
目前,多種脈寬調(diào)制技術(shù)在電壓源型逆變器供電的交流電動(dòng)機(jī)控制系統(tǒng)中得到了廣泛應(yīng)用,其中,SVPWM 以較高的直流電壓利用率、較低的開關(guān)諧波、易于數(shù)字實(shí)現(xiàn)等優(yōu)點(diǎn)而備受青睞[4、5]。Habetler 在1991 年把SVPWM 技術(shù)引入到異步電機(jī)DTC 中,運(yùn)用SVPWM 技術(shù)來減小電動(dòng)機(jī)轉(zhuǎn)矩的脈動(dòng),這種方法從根本上摒棄了開關(guān)表的概念;從控制效果上看,這種方法可以有效地解決滯環(huán)控制器所引起的轉(zhuǎn)矩和磁鏈脈動(dòng)等一系列問題。在其后一段時(shí)間內(nèi),基于SVPWM 的直接轉(zhuǎn)矩控制策略已廣泛應(yīng)用于異步電動(dòng)機(jī)調(diào)速領(lǐng)域[6-8]。
本文擬采用SVPWM 技術(shù)實(shí)現(xiàn)PMSM 的直接轉(zhuǎn)矩控制,在定子磁鏈ψs幅值保持恒定的情況下,通過控制轉(zhuǎn)子磁鏈ψf和定子磁鏈ψs間負(fù)載角δsm的增量Δδsm來控制電磁轉(zhuǎn)矩Te的增量ΔTe,從而達(dá)到控制電動(dòng)機(jī)轉(zhuǎn)速的目的,并通過仿真研究磁鏈和轉(zhuǎn)矩脈動(dòng)情況,并與傳統(tǒng)的DTC 進(jìn)行比較。
1 基于SVPWM 直接轉(zhuǎn)矩控制原理
傳統(tǒng)DTC 系統(tǒng)通過將電動(dòng)機(jī)給定轉(zhuǎn)速和實(shí)際轉(zhuǎn)速的誤差,經(jīng)PI 調(diào)節(jié)器輸出作為轉(zhuǎn)矩的給定信號(hào);同時(shí)系統(tǒng)根據(jù)檢測(cè)的電動(dòng)機(jī)三相電流和電壓值,利用磁鏈模型和轉(zhuǎn)矩模型分別計(jì)算電動(dòng)機(jī)的磁鏈和轉(zhuǎn)矩的大小,計(jì)算電動(dòng)機(jī)轉(zhuǎn)子的位置、電動(dòng)機(jī)給定磁鏈和轉(zhuǎn)矩與實(shí)際值的誤差;最后根據(jù)它們的狀態(tài)選擇逆變器的開關(guān)電壓矢量,使電動(dòng)機(jī)能按控制要求調(diào)節(jié)輸出轉(zhuǎn)矩,最終達(dá)到調(diào)速的目的[9]。其原理框圖如圖1 所示。
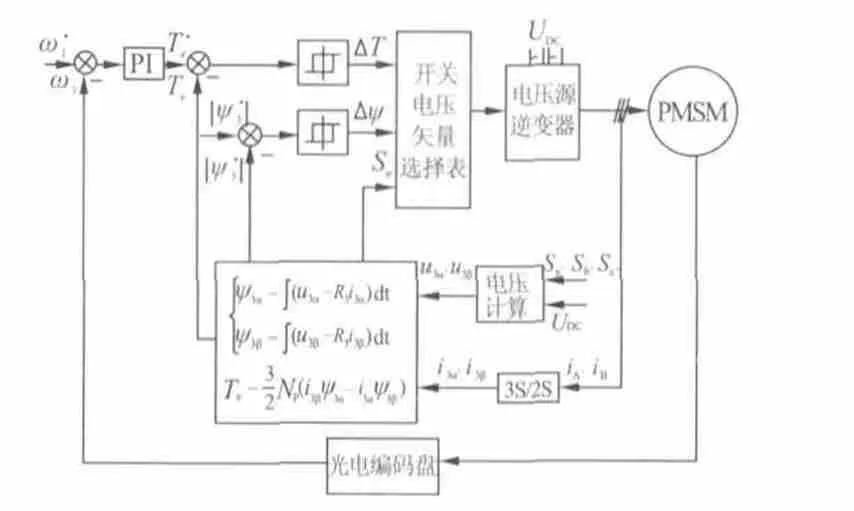
圖1 傳統(tǒng)DTC 系統(tǒng)原理圖
SVPWM 是在傳統(tǒng)DTC 策略的基礎(chǔ)上將每一扇區(qū)再分成若干個(gè)對(duì)應(yīng)于時(shí)間PWM 周期的小區(qū)間,按照線性組合、三段逼近等方式獲得電壓空間矢量Us來獲得逼近圓形的旋轉(zhuǎn)磁場(chǎng)。圖2 是一個(gè)典型的三相電壓源逆變器模型,直流母線電壓為UDC,六個(gè)開關(guān)管分別用理想開關(guān)1 ~6 組成a、b、c 三個(gè)橋臂,每個(gè)橋臂上下開關(guān)管互鎖導(dǎo)通,分別用開關(guān)變量Sa、Sb、Sc來表示a、b、c 三個(gè)橋臂開關(guān)管開關(guān)情況。

圖2 三相電壓型逆變器結(jié)構(gòu)簡(jiǎn)圖
相應(yīng)的逆變器輸出電壓空間矢量可表示為

開關(guān)變量Sa、Sb、Sc的不同組合決定了該種逆變器只能輸出八個(gè)電壓矢量,其中有六個(gè)運(yùn)動(dòng)矢量u1~u6和兩個(gè)零矢量u0、u7的分布如圖3 所示。

圖3 輸出的空間電壓矢量
針對(duì)不同的電壓空間矢量和相應(yīng)不同的作用時(shí)間,采用線性組合的方法將其合成所需要相位的磁鏈增量,進(jìn)而很好地跟蹤定子磁鏈,使其形成近似圓形的磁場(chǎng)。電壓空間矢量合成原理如圖4所示。u4、u6為相鄰電壓矢量,t4、t6為其作用時(shí)間,T0為采樣周期,us為期望電壓空間矢量。

圖4 電壓空間矢量的線性組合
設(shè)T0=t4+t6+t0或T0=t4+t6+t7為系統(tǒng)PWM 周期,t0(t7)、t4和t6分別為每個(gè)周期內(nèi)u0(u7)、u4、u6的作用時(shí)間,則t0(t7)、t4和t6分別為

這里為了減少功率開關(guān)器件的開關(guān)次數(shù),一般使u0、u7各占一半時(shí)間。
基于SVPWM 的PMSM DTC 系統(tǒng)的運(yùn)行過程可以歸納為:在傳統(tǒng)DTC 原理的基礎(chǔ)上,將測(cè)量所得的電動(dòng)機(jī)端電壓、電流變量通過坐標(biāo)變換計(jì)算出定子磁鏈和轉(zhuǎn)矩觀測(cè)值,通過參考電壓矢量計(jì)算模型計(jì)算出為消除轉(zhuǎn)矩、磁鏈誤差所需的參考電壓矢量usα、usβ,再用一個(gè)SVPWM 單元合成開關(guān)電壓矢量us,將調(diào)制過程中產(chǎn)生的一系列開關(guān)信號(hào)送入逆變器,實(shí)現(xiàn)轉(zhuǎn)矩、磁鏈的平滑控制。
2 基于SVPWM DTC 系統(tǒng)的實(shí)現(xiàn)
2.1 基于SVPWM DTC 系統(tǒng)組成
基于SVPWM 的PMSM DTC 系統(tǒng)的結(jié)構(gòu)如圖5所示。在這個(gè)控制系統(tǒng)中包括兩個(gè)PI 調(diào)節(jié)器:轉(zhuǎn)速調(diào)節(jié)器(ASR)和轉(zhuǎn)矩調(diào)節(jié)器(ATR),預(yù)期電壓矢量計(jì)算模型、SVPWM 模型、電壓源逆變器模型、3s/2s 變換模型、磁鏈估算模型、轉(zhuǎn)矩估算模型等模塊。對(duì)于SVPWM 模塊和傳統(tǒng)DTC 系統(tǒng)建模在文獻(xiàn)[5]、文獻(xiàn)[9]中已分別作了詳細(xì)介紹。如何將傳統(tǒng)DTC 原理和SVPWM 技術(shù)相結(jié)合是本文所要研究的重點(diǎn),即預(yù)期電壓矢量模型。
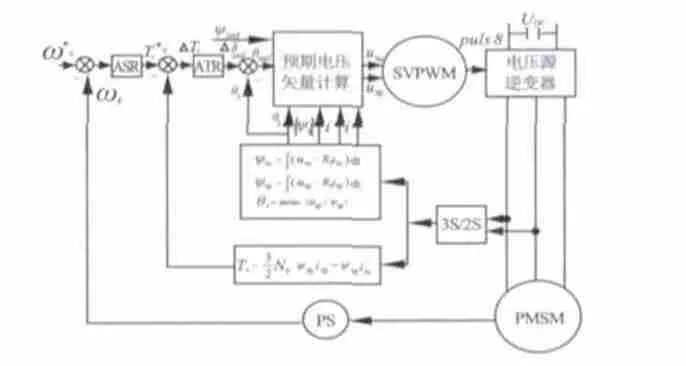
圖5 基于SVPWM 的PMSM DTC 系統(tǒng)框圖
2.2 預(yù)期電壓矢量計(jì)算模型
在dq0 旋轉(zhuǎn)坐標(biāo)系下PMSM 的數(shù)學(xué)模型為

式中,usd、usq—定子電壓d、q 軸分量;isd、isq—定子電流d、q 軸分量;Ld、Lq—定子繞組d、q 軸等效電感;ψs—定子磁鏈;ψf—轉(zhuǎn)子磁鏈;Rs—定子繞組電阻;p—微分算子;ωr—轉(zhuǎn)子機(jī)械角速度;δsm—負(fù)載角,即ψs和ψf間的電角度;Np—電機(jī)極對(duì)數(shù);Te—電磁轉(zhuǎn)矩。
由式(4)可以看出,當(dāng)定子磁鏈ψs的幅值 ψs保持恒定時(shí),負(fù)載角δsm的增量Δδsm就決定了電磁轉(zhuǎn)矩Te的增量ΔTe。再對(duì)式(4)兩邊求導(dǎo)可得

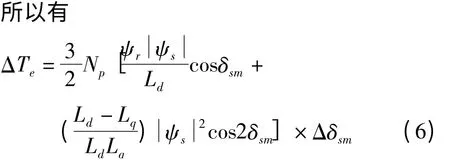
圖6 為定子αβ 坐標(biāo)系中負(fù)載角增量Δδsm的示意圖。由此可知,在定子αβ 坐標(biāo)系中的空間相位角θsref=θs+Δδsm,其中θs為定子磁鏈?zhǔn)噶喀譻在定子αβ 坐標(biāo)系中的空間相位角,Δδsm為負(fù)載角δsm的增量。為了獲得轉(zhuǎn)矩增量ΔTe,定子磁鏈?zhǔn)噶喀譻的旋轉(zhuǎn)速度應(yīng)大于轉(zhuǎn)子磁鏈?zhǔn)噶喀譮;而DTC 就是為了獲得理想的開關(guān)電壓矢量us從而控制ψs的速度變化,產(chǎn)生一個(gè)負(fù)載角增量Δδsm,使得定子磁鏈?zhǔn)噶喀譻運(yùn)動(dòng)到新的位置ψsref。

圖6 定子αβ 坐標(biāo)系中的負(fù)載角增量Δδsm
在定子αβ 坐標(biāo)系內(nèi),容易得到

式中,usα、usβ—定子電壓α、β 軸分量;isα、isβ—定子電流α、β 軸分量;ψsα、ψsβ—定子磁鏈α、β 軸分量;ΔT—采樣時(shí)間。
圖7 是參考電壓矢量usα、usβ的計(jì)算框圖。由式(6)可以容易得知,ΔTe與Δδsm之間具有非線性關(guān)系,也就是說Δδsm是能使實(shí)際轉(zhuǎn)矩Te跟蹤給定轉(zhuǎn)矩所需要的負(fù)載角δsm的增量值,所以在圖7的轉(zhuǎn)矩偏差ΔTe與Δδsm負(fù)載角增量設(shè)置了PI調(diào)節(jié)器。

3 仿真結(jié)果
為了驗(yàn)證基于SVPWM 的PMSM DTC 策略的有效性,在Matlab/Simulink 環(huán)境下對(duì)其進(jìn)行仿真研究。仿真主要參數(shù)設(shè)置如下:定子電阻Rs=1.2Ω,電機(jī)極對(duì)數(shù)Np=4,電機(jī)直、交軸電感Ld=Lq=8.5mH,給定的定子磁鏈額定值ψs=0.175Wb,電機(jī)轉(zhuǎn)動(dòng)慣量J=0.0008kg·m2,直流母線電壓 UDC=300V,PWM 調(diào)制頻率設(shè)為10kHz。傳統(tǒng)DTC 系統(tǒng)PI 調(diào)節(jié)器參數(shù)設(shè)計(jì)為:Kp=2,Ki=0.25,限幅值為±10,轉(zhuǎn)矩滯環(huán)參數(shù)為[-0.01,0.01],磁鏈滯環(huán)參數(shù)為[-0.001,0.001];基于SVPWM DTC 系統(tǒng)ASR、ATR 參數(shù)分別為:Kpl=5,Kil=0.25,Kp2=0.1,Ki2=0.2,限幅值分別為±4,±0.1。
在t=0s 時(shí),轉(zhuǎn)速由0 突加為500r/min,負(fù)載轉(zhuǎn)矩為1N·m 恒轉(zhuǎn)矩運(yùn)行;在t=0.1s 時(shí),轉(zhuǎn)速由500r/min 突增至 600r/min,負(fù)載轉(zhuǎn)矩保持為1N·m;在t=0.2s 時(shí),轉(zhuǎn)速保持為600r/min,負(fù)載轉(zhuǎn)矩由1N·m 突增至3N·m,得到相應(yīng)的電動(dòng)機(jī)轉(zhuǎn)速、定子磁鏈軌跡、定子磁鏈隨時(shí)間變化曲線、定子兩相電流、電動(dòng)機(jī)轉(zhuǎn)矩動(dòng)態(tài)性能仿真圖分別如圖8、圖9、圖10、圖11、圖12 所示。

圖8 電動(dòng)機(jī)轉(zhuǎn)速動(dòng)態(tài)響應(yīng)曲線

圖9 定子磁鏈軌跡



圖12 電機(jī)轉(zhuǎn)矩動(dòng)態(tài)響應(yīng)仿真圖
從圖8、圖9、圖10、圖11、圖12 可以看出,與傳統(tǒng)DTC 相比,基于SVPWM DTC 系統(tǒng)磁鏈脈動(dòng)明顯減小且磁鏈圓更平滑;兩種控制策略在轉(zhuǎn)速和負(fù)載分別突變的情況下,定子兩相電流在很短的時(shí)間內(nèi)都能恢復(fù)穩(wěn)態(tài),但基于SVPWM DTC 策略兩相電流的正弦度要比傳統(tǒng)DTC 策略下好很多,轉(zhuǎn)矩脈動(dòng)也明顯降低。
4 結(jié)語
本文在分析傳統(tǒng)DTC 原理以及SVPWM 技術(shù)的基礎(chǔ)上,實(shí)現(xiàn)了基于SVPWM 策略的PMSM DTC 系統(tǒng)。該控制系統(tǒng)通過跟蹤磁鏈和轉(zhuǎn)矩誤差值來選擇合適的電壓空間矢量以消除誤差,從而很好地控制電機(jī)轉(zhuǎn)速,彌補(bǔ)了傳統(tǒng)DTC 系統(tǒng)中磁鏈、轉(zhuǎn)矩脈動(dòng)大的不足。仿真結(jié)果表明,無論在定子電流正弦度,還是磁鏈、轉(zhuǎn)矩脈動(dòng)問題方面,基于SVPWM 的PMSM DTC 策略均優(yōu)于傳統(tǒng)的PMSM DTC 策略。
[1] 周揚(yáng)忠,胡育文. 交流電動(dòng)機(jī)直接轉(zhuǎn)矩控制[M].北京:機(jī)械工業(yè)出版社,2009,10.
[2] 熊祥,郭丙君.基于雙模態(tài)控制的交流異步電機(jī)直接轉(zhuǎn)矩控制系統(tǒng)[J]. 華東理工大學(xué)學(xué)報(bào),2010,36(3):438-442.
[3] M.Chen,H.Y.Gao,H.M.Song.Simulation Study on a DTC System of PMSM.The 6th International Forum on Strategic Technology,Vol.1,pp.564-569,2011.
[4] 程小猛,陸海峰,瞿文龍,等. 一種減小SVPWM 線性調(diào)制區(qū)損失的方法[J]. 清華大學(xué)學(xué)報(bào),2009,49(11):1861-1865.
[5] Z.G.Wang,J. X. Jin,Y. G. Guo,etc al. Modeling and Simulation of PMSM Control System Based on SVPWM[J].Proceedings of the 27 Chinese Control Conference,2008,724-728.
[6] 孟慶春,葉錦嬌,郭鳳儀.異步電動(dòng)機(jī)直接轉(zhuǎn)矩控制系統(tǒng)的改進(jìn)方案[J].中國電機(jī)工程學(xué)報(bào),2005,25(13):118-122.
[7] 魏欣,陳大躍,趙春宇.一種基于占空比控制技術(shù)的異步電動(dòng)機(jī)直接轉(zhuǎn)矩控制方案[J]. 中國電機(jī)工程學(xué)報(bào),2005,25(14):93-97.
[8] 胡虎,李永東.基于區(qū)域電壓矢量表的交流異步電動(dòng)機(jī)直接轉(zhuǎn)矩預(yù)測(cè)控制策略研究[J]. 電工技術(shù)學(xué)報(bào),2004,19(2):25-30.
[9] 謝運(yùn)祥,盧柱強(qiáng). 基于MATLAB/Simulink 的永磁同步電機(jī)直接轉(zhuǎn)矩控制仿真建模[J]. 華南理工大學(xué)學(xué)報(bào),2004,32(1):19-23.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32

- 防爆電機(jī)的其它文章
- 貫流式水輪發(fā)電機(jī)磁極鐵心制造技術(shù)