滑模控制器對(duì)永磁同步電機(jī)的調(diào)速性能研究
2013-03-04 05:22:44高輝姚莉莉
防爆電機(jī) 2013年5期
關(guān)鍵詞:系統(tǒng)
高輝,姚莉莉
(1 解放軍電子工程學(xué)院,安徽合肥230037;2 安徽創(chuàng)世科技公司,安徽合肥230037)
0 引言
目前,滑模控制(SMC)已被作為一種方法用來(lái)控制具有非線性、不確定動(dòng)態(tài)性能和有界擾動(dòng)輸入的系統(tǒng)。滑模控制(SMC)的特點(diǎn)是:(1)對(duì)參數(shù)的變化不敏感;(2)不響應(yīng)外界干擾;(3)快速的動(dòng)態(tài)響應(yīng)。對(duì)具有非線性和有擾動(dòng)輸入的永磁同步電機(jī)調(diào)速系統(tǒng)來(lái)說(shuō),為達(dá)到好的調(diào)速控制效果,其系統(tǒng)臨界工作點(diǎn)上的SMC 設(shè)計(jì)需要知道系統(tǒng)的數(shù)學(xué)模型。本文在充分研究永磁同步電機(jī)數(shù)學(xué)模型的基礎(chǔ)上,提出了一個(gè)分解的滑模控制(DSMC)設(shè)計(jì)方法用來(lái)控制永磁同步電機(jī)的速度。電機(jī)系統(tǒng)被分成具有不同滑動(dòng)表面的兩個(gè)子系統(tǒng),以實(shí)現(xiàn)所需的速度。
1 永磁同步電機(jī)數(shù)學(xué)模型
在永磁同步電機(jī)數(shù)學(xué)模型中,控制單元的設(shè)計(jì)是以轉(zhuǎn)子坐標(biāo)系{d,q}為模型的,坐標(biāo)系中所有信號(hào)的波形是不定的,且從轉(zhuǎn)子到定子坐標(biāo)系的轉(zhuǎn)化過(guò)程是隱含進(jìn)行的。這與在{a,b,c}定子坐標(biāo)系下,驅(qū)動(dòng)信號(hào)必須被調(diào)整為正弦波是不同的。
當(dāng)Ld=Lq=L 時(shí),永磁同步電機(jī)模型如式(1)中所示。

式中,k—電機(jī)常數(shù);ud,uq—{d,q}坐標(biāo)系中的轉(zhuǎn)子電壓,V;id,iq—{d,q}坐標(biāo)系中的轉(zhuǎn)子電流,A;θ—電氣轉(zhuǎn)子位置,rad;ω—電機(jī)的電氣角速度,rad/s;Rd,Rq—d、q 軸的繞組電阻,Ω;Ld,Lq—d、q 軸的電感,H;λ—轉(zhuǎn)子磁通,Wb;J—轉(zhuǎn)動(dòng)慣量,kg/m2;μ—摩擦系數(shù),N·m·s;p—永磁體磁極對(duì)數(shù);TL—負(fù)載轉(zhuǎn)矩,N·m;Te—電機(jī)扭矩,N·m。
再令x1=id,x2=iq,x3=ω,則電機(jī)模型的方程可改寫(xiě)成

由式(2)可知,電機(jī)的運(yùn)行受系統(tǒng)粘性摩擦和電路磁飽和效應(yīng)的影響,此外電機(jī)的轉(zhuǎn)速和電流之間也存在耦合,因此永磁同步電機(jī)的動(dòng)態(tài)模型是非線性的。
2 滑模控制器設(shè)計(jì)
2.1 系統(tǒng)分解
根據(jù)式(2),可將永磁同步電機(jī)系統(tǒng)(其狀態(tài)方程為˙x=f(x,u,t))的控制量u(x,t)分解成如下形式
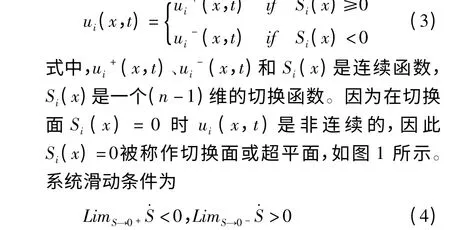
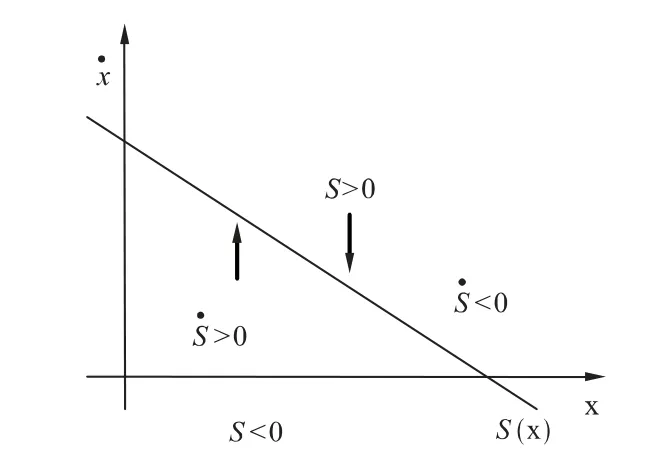
圖1 滑動(dòng)面S 示意圖
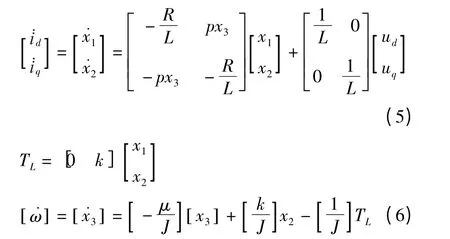
為了使系統(tǒng)的輸入量u1(x,t)產(chǎn)生所需的系統(tǒng)輸出量,須確定電機(jī)的電流(id,iq)和電壓(ud,uq)以產(chǎn)生所需電機(jī)轉(zhuǎn)速ω,因此可將系統(tǒng)分為電氣和機(jī)械兩個(gè)子系統(tǒng)。式(5)為電氣子系統(tǒng)數(shù)學(xué)模型,可根據(jù)已知電機(jī)速度調(diào)節(jié)輸入電壓的大小,通過(guò)驅(qū)動(dòng)電機(jī)的機(jī)械部件,產(chǎn)生輸出電流。式(6)為機(jī)械子系統(tǒng)數(shù)學(xué)模型,根據(jù)輸入電流控制電機(jī)轉(zhuǎn)動(dòng),直到達(dá)到設(shè)定轉(zhuǎn)速。
2.2 控制器設(shè)計(jì)
解耦控制的思想是將式(2)表現(xiàn)的非線性系統(tǒng)分解成以式(5)和式(6)表示的電氣和機(jī)械兩個(gè)子系統(tǒng),然后使子系統(tǒng)的狀態(tài)朝著滑動(dòng)面S1=0,S2=0移動(dòng)。
滑動(dòng)面的參數(shù)S1,S2,被定義為

式中,c1、c2、c3—abc 坐標(biāo)系的滑動(dòng)面S1的常數(shù);ira,irb、irc—相電流參考值;ia、ib、ic—實(shí)際的相電流值;c4—滑動(dòng)面S2的常數(shù);ωr—電機(jī)的參考轉(zhuǎn)速;ω—電機(jī)的實(shí)際轉(zhuǎn)速。
PMSM 系統(tǒng)框圖如圖2 所示。確定所需轉(zhuǎn)速,并計(jì)算參考電流ira、irb和irc。滑模控制器產(chǎn)生逆變器的開(kāi)/關(guān)信號(hào)g 用來(lái)驅(qū)動(dòng)電機(jī),檢測(cè)電機(jī)電流、位置和角速度值后,調(diào)節(jié)滑模控制器使系統(tǒng)狀態(tài)處于滑動(dòng)面。
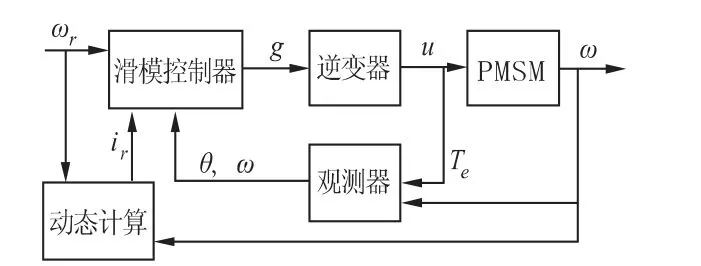
圖2 PMSM 系統(tǒng)框圖
3 系統(tǒng)仿真設(shè)計(jì)
3.1 使用SMC 滑模控制器的系統(tǒng)仿真圖
圖3 中PI 為模塊計(jì)算所需參考信號(hào);dq-abc模塊將dq 和abc 坐標(biāo)系中的電流進(jìn)行變換;SMC1根據(jù)式(7)表示的電流誤差,計(jì)算輸出控制電壓使系統(tǒng)朝滑動(dòng)面S1運(yùn)行;SMC2 可以根據(jù)式(8)表示的轉(zhuǎn)速誤差,產(chǎn)生電機(jī)所需電流使系統(tǒng)朝滑動(dòng)面S2運(yùn)行。SMC1 模塊和SMC2 模塊仿真設(shè)計(jì)如圖4、圖5 所示。

圖3 采用SMC 滑模控制器的永磁同步電機(jī)速度控制
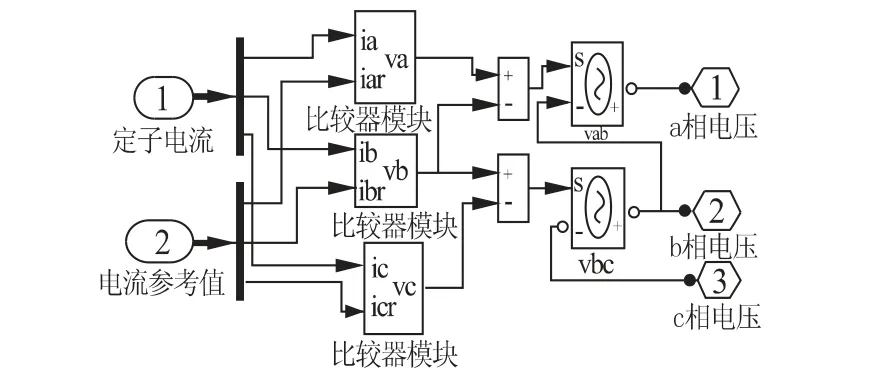
圖4 SMC1 模塊圖
SMC1 中參數(shù)C1=C2=C3。SMC2 中若考慮兼顧響應(yīng)速度和無(wú)超調(diào),可選C4大小為1。
3.2 使用脈寬調(diào)制(PWM)的系統(tǒng)仿真圖
圖6 中畫(huà)出了使用脈寬調(diào)制的逆變器來(lái)控制電機(jī)轉(zhuǎn)速的系統(tǒng)仿真圖。
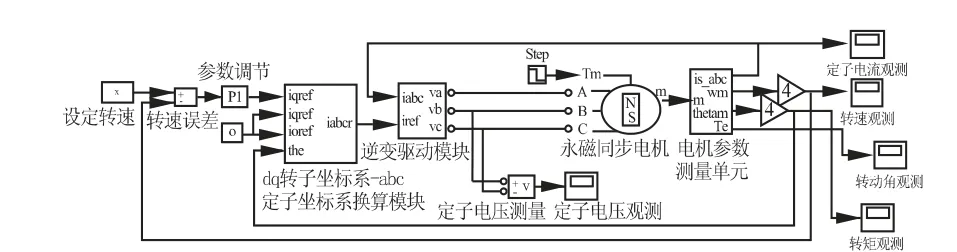
圖6 采用脈寬調(diào)制的永磁同步電機(jī)速度控制
4 仿真結(jié)果
電機(jī)參數(shù)為:P=1.1kW,R=2.875Ω,額定轉(zhuǎn)速300rad/s,Ld=Lq=8.5mH,J=0.8×10-3kg/m2,μ=1N·m·s。
實(shí)驗(yàn)中電機(jī)以額定轉(zhuǎn)速300rad/s 運(yùn)行,圖7、圖8 畫(huà)出了兩種控制方式下的電機(jī)穩(wěn)定運(yùn)行未受到外力干擾時(shí)的轉(zhuǎn)速圖,可以看出使用SMC 控制的轉(zhuǎn)速超調(diào)量要小于PWM 控制的轉(zhuǎn)速超調(diào)量。圖9、圖10 畫(huà)出了當(dāng)受到外加力矩干擾后,兩種控制方式下的電機(jī)轉(zhuǎn)矩在0.2s 內(nèi)的變化情況,表1中記錄了實(shí)驗(yàn)的數(shù)據(jù)。
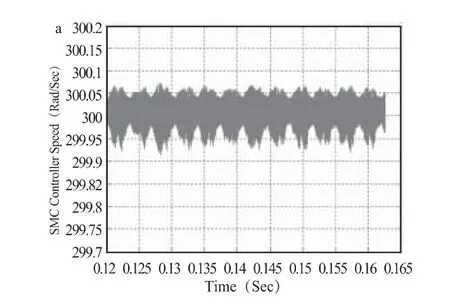
圖7 使用SMC 的仿真系統(tǒng)轉(zhuǎn)速變化
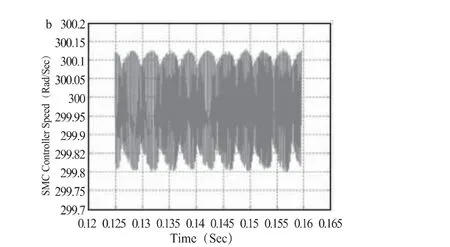
圖8 使用PWM 的仿真系統(tǒng)轉(zhuǎn)速變化
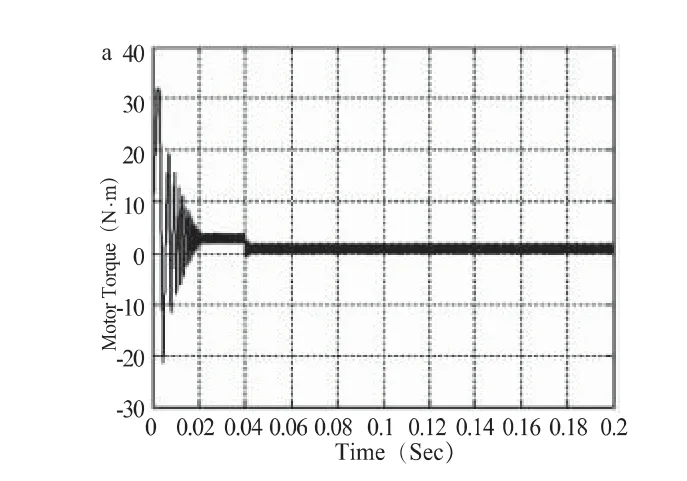
圖9 使用SMC 的仿真系統(tǒng)轉(zhuǎn)矩變化
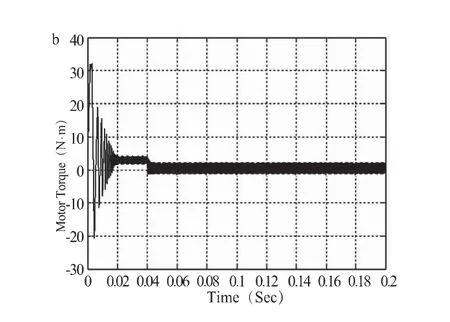
圖10 使用PWM 的仿真系統(tǒng)轉(zhuǎn)矩變化

表1 實(shí)驗(yàn)數(shù)據(jù)對(duì)比
從實(shí)驗(yàn)結(jié)果可以看出在0.2s 的仿真時(shí)間段內(nèi),SMC 控制器的轉(zhuǎn)速超調(diào)量要小于PWM 控制器的轉(zhuǎn)速超調(diào)量,同時(shí)PWM 控制器中的轉(zhuǎn)矩值有負(fù)值,也意味著比SMC 中的控制器的轉(zhuǎn)矩脈動(dòng)要高。
5 結(jié)語(yǔ)
本文利用解耦方法將永磁同步電機(jī)控制系統(tǒng)分為可單獨(dú)建模和控制的電氣和機(jī)械兩個(gè)子系統(tǒng),在此基礎(chǔ)上設(shè)計(jì)了一種使用滑模控制的電機(jī)調(diào)速系統(tǒng),并對(duì)使用滑模控制和脈寬調(diào)制控制的兩種永磁同步電機(jī)控制系統(tǒng)分別進(jìn)行了仿真。實(shí)驗(yàn)結(jié)果表明:SMC 控制比PWM 控制能更好地控制永磁同步電機(jī)的運(yùn)行,在突加外力干擾時(shí),其轉(zhuǎn)矩脈動(dòng)更小,轉(zhuǎn)速的超調(diào)也更小,這說(shuō)明其控制效果更準(zhǔn)確,更有效。
[1] 高輝,姚莉莉.六步換相法控制無(wú)刷直流電機(jī)設(shè)計(jì).防爆電機(jī),2012,47(4):3-6.
[2] 歐陽(yáng)敘穩(wěn),尹華杰,葉長(zhǎng)青.永磁同步電動(dòng)機(jī)滑模控制仿真[J].微特電機(jī),2011,(8):38-41.
[3] 黃石維,周國(guó)榮.永磁同步電機(jī)的模糊滑模控制[J].電機(jī)技術(shù),2010,(3):16-18..
[4] 王斌,丁強(qiáng).基于滑模變結(jié)構(gòu)永磁同步電機(jī)速度控制器[J].制造業(yè)自動(dòng)化,2011,33(11):86-88.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
