霍爾傳感器在無刷直流電機(jī)上的應(yīng)用
2013-03-04 05:23:00劉吉超李巴津伍春生
防爆電機(jī) 2013年5期
關(guān)鍵詞:信號
劉吉超,李巴津,伍春生
(1 內(nèi)蒙古工業(yè)大學(xué)電力學(xué)院,內(nèi)蒙古呼和浩特010000;2 江蘇浩峰汽車附件有限公司,江蘇常州213000)
0 引言
無刷直流電機(jī)(Brushless Direct Current Motor,以下簡稱BLDCM)具有轉(zhuǎn)矩輸出特性好、依靠電子換相、使用壽命長等優(yōu)點。BLDCM 的應(yīng)用主要體現(xiàn)在控制方面,目前其控制方式主要有基于傳感器控制方式以及無傳感器控制方式。由于無傳感器控制方式多處于研究和測試階段,實際工況測試還存在問題,因此多數(shù)BLDCM 控制系統(tǒng)中采用有傳感器的控制方式。該種控制方式易于實現(xiàn),在實際應(yīng)用中性能相對穩(wěn)定。但是該種方式的輸出效率取決于傳感器安裝位置是否準(zhǔn)確。文獻(xiàn)[1]中提供了幾種常用的傳感器安裝方法,實際應(yīng)用中發(fā)現(xiàn)通過繞組計算獲得的安裝角度與實際測量值誤差比較大,直接安裝式需要憑經(jīng)驗調(diào)整霍爾傳感器位置,方法局限性比較大。因此提出了一種基于短時脈沖定位的霍爾傳感器安裝方法。實際應(yīng)用發(fā)現(xiàn),該種方法易于實現(xiàn),便于工程運用,并且安裝位置準(zhǔn)確。
2 方法原理
2.1 霍爾傳感器[2]工作原理
霍爾傳感器是基于霍爾效應(yīng)原理工作的,如圖1 所示。當(dāng)電流垂直于外磁場通過導(dǎo)體時,在導(dǎo)體的垂直于磁場和電流方向的兩個端面之間會出現(xiàn)電勢差,這個電勢差也稱霍爾電勢差UH,見式(1)

式中,KH—霍爾靈敏度;I—是流過霍爾的電流;B—霍爾所處磁場的磁場強度。這樣當(dāng)霍爾處在N 極或者S 極的磁場中時就會產(chǎn)生兩個數(shù)值相同極性相反的UH。在霍爾的應(yīng)用中常把正值定義為數(shù)字量“1”,負(fù)值定義為數(shù)字量“0”,從而可以使霍爾在不同極性的磁場中輸出不同的數(shù)字量。在BLDCM 控制中,一般將霍爾器件固定在定子或者機(jī)殼上,讓其感應(yīng)面處于轉(zhuǎn)子的磁場中。由于轉(zhuǎn)子是N 極和S 極交替均勻排列的,因此當(dāng)轉(zhuǎn)子轉(zhuǎn)動時,處在交替變換磁場中的霍爾傳感器就會產(chǎn)生不同的數(shù)字量。基于霍爾傳感器控制的BLDCM 系統(tǒng)就是依靠這樣的原理對電機(jī)實施控制的。
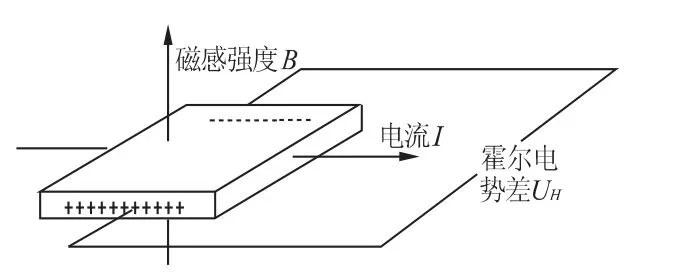
圖1 霍爾傳感器工作原理
2.2 BLDCM 換相原理[3]
圖2 是電機(jī)本體的內(nèi)部結(jié)構(gòu)和通電狀態(tài),電機(jī)一個電周期內(nèi)對應(yīng)的需要有6 次通電狀態(tài)。圖3 給出的是一個電周期轉(zhuǎn)子通電的矢量圖,按圖2 的通電順序,分別設(shè)電源母線電壓為Ubat,電機(jī)三相端電壓分別為UA、UB、UC,分別加在空間上相差120°的平面坐標(biāo)系上,又因為端電壓隨時間t 的改變而改變,因此定義端電壓空間矢量為UA(t)、UB(t)、UC(t)它們的方向始終在各相的軸線上,而大小則隨時間t 按正弦規(guī)律變化,且時間相位相差120°,則假設(shè)相電壓有效值為Um,設(shè)f 為開關(guān)頻率,則有
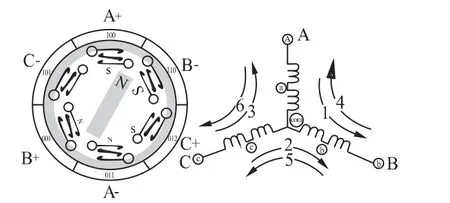
圖2 電機(jī)本體和通電順序
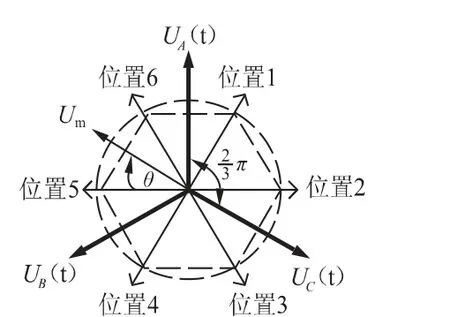
圖3 電機(jī)換相矢量圖
這樣每次通電對應(yīng)一個位置,按照一定的順序通電,轉(zhuǎn)子就可以對應(yīng)圖3 中6 個位置,這個過程就是轉(zhuǎn)子換相。按照一定的時序給電周期性順序加電,電機(jī)就可以轉(zhuǎn)動起來了。
2.3 短時脈沖定位原理[3-5]
短時脈沖定位原理來源于電機(jī)換相原理。如圖2、圖3 和圖4 所示,當(dāng)給電機(jī)三相按標(biāo)號1、2、3、4、5、6 情況通電時,依據(jù)式(2)、式(3)可知,電機(jī)會出現(xiàn)6 次動作。圖3 中的位置1、2、3、4、5、6對應(yīng)圖4 中的換相點A、B、C、D、E、F。當(dāng)給電機(jī)通MST1 到MST6 任意狀態(tài)的電,只要通電處和轉(zhuǎn)子的初始位置夾角不等于0°或180°,轉(zhuǎn)子就會停在相應(yīng)的位置區(qū)間內(nèi)。例如當(dāng)給電機(jī)按MST2 通電時,電機(jī)轉(zhuǎn)子會停在60°到120°區(qū)間的任何一個位置上,圖4 標(biāo)記為a 點。如圖5 所示,以4 對極電機(jī)為例,轉(zhuǎn)子的電角度和機(jī)械角度的關(guān)系是θE/θM=4,其中θE是電角度,θM是機(jī)械角度,此時電角度360°對應(yīng)機(jī)械角度90°。這樣給電機(jī)一定的占空比值和執(zhí)行時間,按照電機(jī)電周期6 次通電順序后,電機(jī)轉(zhuǎn)子就可以在相應(yīng)區(qū)間位置停留,此時也稱短時脈沖定位。當(dāng)三個霍爾傳感器按照60°或者120°安裝時,6 個位置就會出現(xiàn)6 組霍爾信號組,每組由3 個霍爾信號組成。
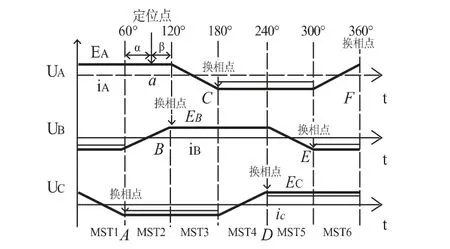
圖4 一個電周期電機(jī)換相情況
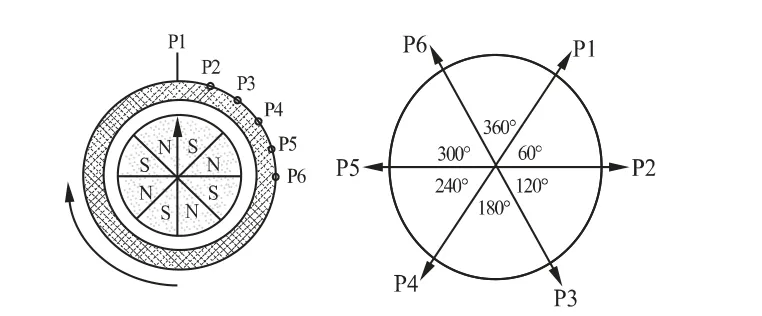
圖5 短時脈沖定位原理
2.4 霍爾位置確定原理
依據(jù)短時脈沖定位原理,如圖4 所示。當(dāng)給電機(jī)按MST2 狀態(tài)通電時,轉(zhuǎn)子在電磁力作用下會被拉至60°到120°之間的任何一個位置,假如此時電機(jī)被拉至a 點處,霍爾傳感器會輸出一組霍爾信號。按照換相原理,只有當(dāng)轉(zhuǎn)子在圖4 所示的換相點位置換相時電機(jī)的效率才是最高的,換相位置是最佳的。雖然此時電機(jī)按MST2 通電,但轉(zhuǎn)子的位置卻并非恰好在換相點A 處,而是存在一定的角度偏差,即α 和β。如果此時在a 點處進(jìn)行下一次換相,而不是在B 點處換相,電機(jī)就會出現(xiàn)換相超前。因此,雖然電機(jī)停在a 處,輸出一組霍爾信號,但是要對α 和β 進(jìn)行相應(yīng)的調(diào)整。目前由于還沒有有效的方法計算這兩個值,因此首先確定a 點后,觀測相應(yīng)的霍爾信號,然后按照相反方向轉(zhuǎn)動霍爾位置,直至霍爾信號發(fā)生跳變,此時α 為0°,也就是α 點恰好和換相點A 重合;β 為60°,也就是距離下一次換相點B滯后60°。此時與a 點對應(yīng)的霍爾信號就是換相點A 對應(yīng)的霍爾信號,且α 為0°時的霍爾傳感器位置就是霍爾傳感器的安裝位置。
3 實現(xiàn)過程
硬件原理圖如圖6、圖7 及圖8 所示,以5 對極轉(zhuǎn)子為例確定霍爾位置。雖然霍爾信號是周期性變化的,但是如果霍爾傳感器安裝位置不準(zhǔn)確,會導(dǎo)致?lián)Q相提前或滯后,嚴(yán)重影響電機(jī)的輸出效率。下面詳細(xì)介紹本方法的實現(xiàn)過程,按照表1 通電順序給電機(jī)通電,執(zhí)行占空比選擇0.1,執(zhí)行時間為5ms。短時脈沖流程見圖9。
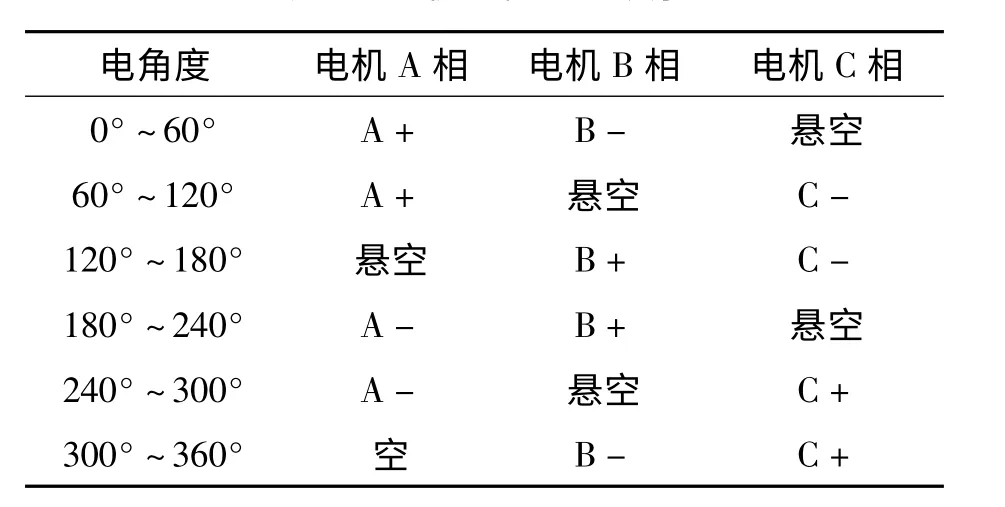
表1 電機(jī)三相通電順序
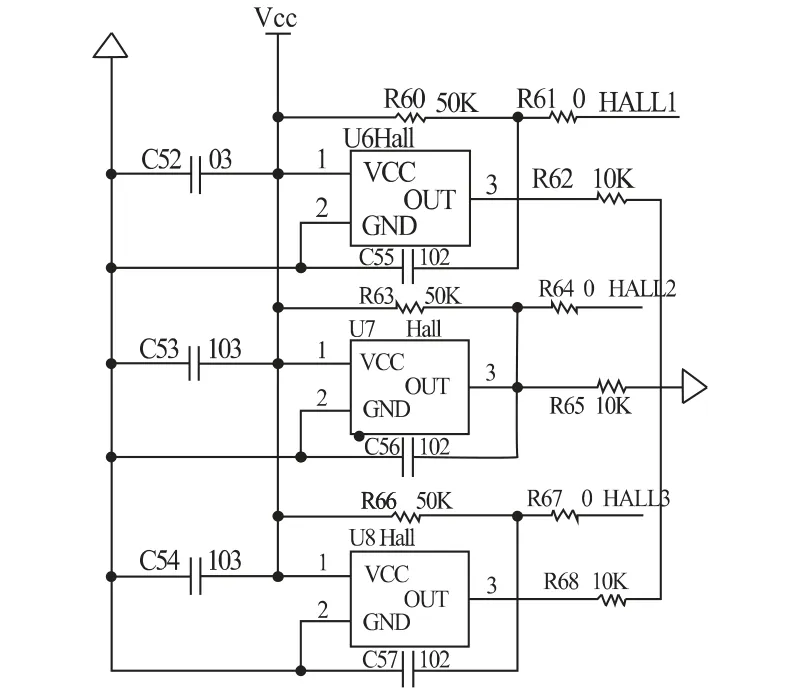
圖6 霍爾傳感器電路
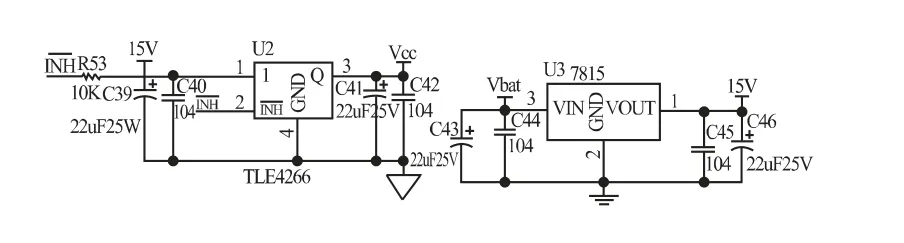
圖7 電源供電電路
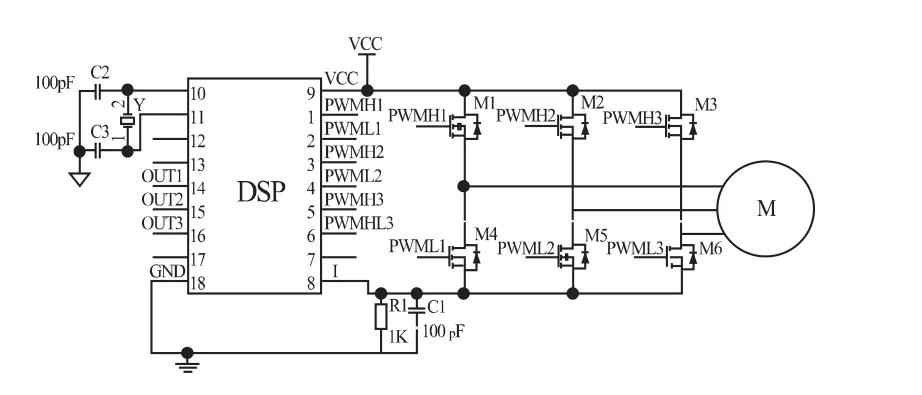
圖8 系統(tǒng)控制電路
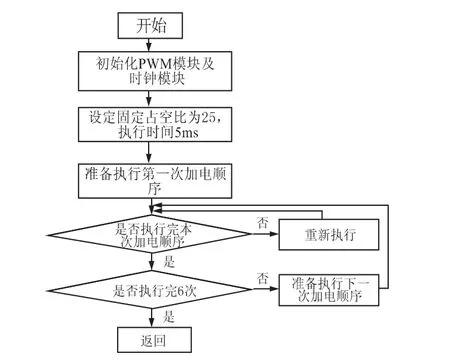
圖9 短時脈沖流程圖
實現(xiàn)步驟如下:
(1)首先按照圖9 的短時脈沖算法,按照給定的占空比和執(zhí)行時間,執(zhí)行0°~60°的通電順序,若電機(jī)不轉(zhuǎn),則稍微轉(zhuǎn)動轉(zhuǎn)子,直到轉(zhuǎn)子轉(zhuǎn)動到指定位置停止,此時標(biāo)記為位置1。
(2)按照這樣的方法執(zhí)行下面5 個區(qū)間的通電順序,標(biāo)記為位置2、3、4、5、6。
(3)計算3 個霍爾傳感器的相對安裝角度,霍爾傳感器可以按照60°電角度間隔也可以按照120°電角度間隔;若選擇前者,則實際霍爾安裝相對角度為60°/5=12°;若選擇后者,則實際霍爾安裝相對角度為120°/5=24°。
(4)將固定好相對角度的霍爾傳感器放置于磁場中,將轉(zhuǎn)子定于第1 個位置處,此時測試得到一組霍爾信號,然后稍微向相反方向轉(zhuǎn)動霍爾傳感器,直至位置1 處的霍爾信號出現(xiàn)跳變?yōu)橹梗藭r霍爾傳感器的位置為換相點處,固定此時霍爾傳感器的位置,此位置就為霍爾傳感器的安裝位置。
(5)固定好霍爾傳感器后,按位置1、2、3、4、5、6 的旋轉(zhuǎn)順序觀測霍爾信號的變化,記錄相應(yīng)位置的霍爾信號,此信號即為6 次換相時的霍爾信號。
4 試驗結(jié)果分析
霍爾傳感器之間角度選擇60°電角度,這樣實際在安裝的過程中三個霍爾之間機(jī)械角度相差12°,DSP 芯片PWM 模塊為8 位,最大占空比255,執(zhí)行下面的程序。
executePositioning(STATE_x,dc,t);//執(zhí)行狀態(tài)x,占空比為dc,執(zhí)行時間t
其中,執(zhí)行函數(shù)為
void executePositioning(int mst)
{
MDC =25; //設(shè)置PWM 定位執(zhí)行占空比25/255
switch(mst)
{
case MOTOR_STATE_1:
IOCON3 =0xC000;//A 相高電平
IOCON2 =0xC380;//B 相低電平
IOCON1 =0xC300;//C 相懸空端
break;
case MOTOR_STATE_2:
IOCON3 =0xC380;//A 相高電平
IOCON2 =0xC300;//B 相懸空端
IOCON1 =0xC000;//C 相低電平
break;
case MOTOR_STATE_3:
IOCON3 =0xC380;//A 相懸空端
IOCON2 =0xC000;//B 相高電平
IOCON1 =0xC300;//C 相低電平
break;
case MOTOR_STATE_4:
IOCON3 =0xC300;//A 相低電平
IOCON2 =0xC000;//B 相高電平
IOCON1 =0xC380;//C 相懸空端
break;
case MOTOR_STATE_5:
IOCON3 =0xC000;//A 相低電平
IOCON2 =0xC300;//B 相懸空端
IOCON1 =0xC380;//C 相高電平
break;
case MOTOR_STATE_6:
IOCON3 =0xC000;//A 相懸空端
IOCON2 =0xC380;//B 相低電平
IOCON1 =0xC300;//C 相高電平
break;
}
Delayns_rotorposition(5000);//轉(zhuǎn)子定位的必要延時}
這樣測得的霍爾信號如圖10 所示。
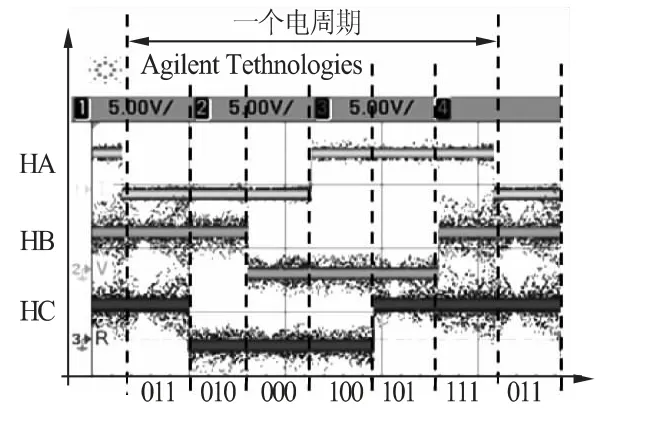
圖10 一個電周期霍爾信號
由于三個霍爾之間采用60°電角度隔開,因此理論上8 組信號只有6 組為有效信號。從圖中看出,當(dāng)一個電周期完成后,下一個階段又從011信號開始。
通過上述的霍爾信號做成換相表,給電機(jī)通電,測得的三相反電動勢如圖11 所示。從圖中看出,雖然此時霍爾信號對應(yīng)的換相順序是對的,但是換相點并不是霍爾信號的跳變點,也就說霍爾位置此時不是最佳位置,每一個狀態(tài)都存在提前換相,影響電機(jī)的效率。按上述方法對霍爾傳感器位置進(jìn)行相應(yīng)的修正后,得到圖12 的波形。從圖中可以看出三相的反電動勢波形得到了很大程度的修正,并且霍爾信號的跳變點恰好在換相位置,從而證明此種方法可以有效地實現(xiàn)霍爾傳感器位置的準(zhǔn)確安裝。
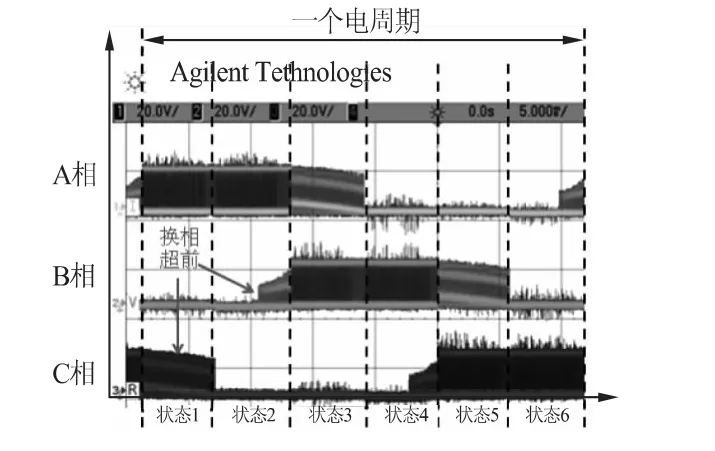
圖11 電機(jī)反電動勢波形
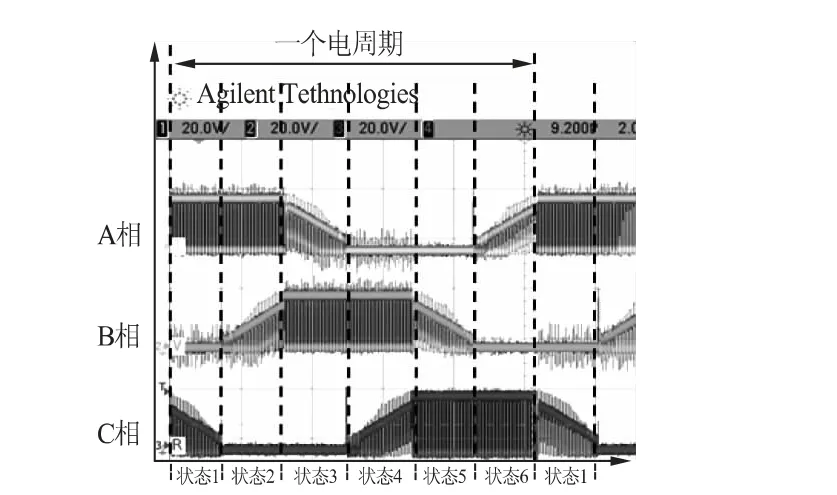
圖12 修正后的反電動勢波形
5 結(jié)語
通過以上理論分析和實驗數(shù)據(jù)表明,短時脈沖定位法可以有效地得出霍爾信號,并且可以根據(jù)位置信息得到霍爾的準(zhǔn)確安裝位置。方法實現(xiàn)過程簡單,易于工程應(yīng)用,可以為基于霍爾傳感器控制的BLDCM 系統(tǒng)提供一種有效的尋找霍爾位置的途徑。
[1] 黃海.永磁無刷直流電機(jī)霍爾位置傳感器的安裝.船電技術(shù)[J],2009,09.
[2] 張瑋,張鳳登.基于霍爾傳感器的車載電動機(jī)實時處理系統(tǒng)[J].傳感器與微系統(tǒng),2013,03.[3] 劉吉超,李巴津,葉文偉,等.新型汽車空調(diào)用無刷直流鼓風(fēng)機(jī)控制算法設(shè)計.微電機(jī),2013,02.
[4] 林明耀,劉文勇,周谷慶.無位置傳感器無刷直流電機(jī)短時脈沖定位加速方法[J].電工技術(shù)學(xué)報,2011,09.
[5] Hang Yenchuan,Tzou Yingyu.A new sensorless starting method for brushless DC motors without reversing rotation[C]. Power Electronics Specialists Conference,Orlando,USA,2007:619-624.
[6] Kim T,Lee H W,Ehsani M. Position sensorless brushless DC motor/generator drives:review and future trends[J]. IET Electric Power Applications,2007,1(7):557-564.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
